RCS4.X通过地图配置在任务中下发货架角度
- 0
- 0
- 分享
- 2025-08-04 13:50
需要在点位上控制载具的具体角度,现有版本RCS未实现在点位上控制角度,后续会增强RCS功能,通过点属性实现具体角度的控制。暂时可以通过脚本的方式在下发任务中带角度,控制终点货架的角度、
项目中需要在点位上控制载具的具体角度,现有版本RCS未实现在点位上控制角度,后续会增强RCS功能,通过点属性实现具体角度的控制。
暂时可以通过脚本的方式在下发任务中带角度,控制终点货架的角度、
处理方式:在地图上设置工作台角度(只有工作台元素才有这个属性),通过脚本的方式获取目标工作台的角度,将角度值赋值到任务的字段中,达到控制载具的角度作用。
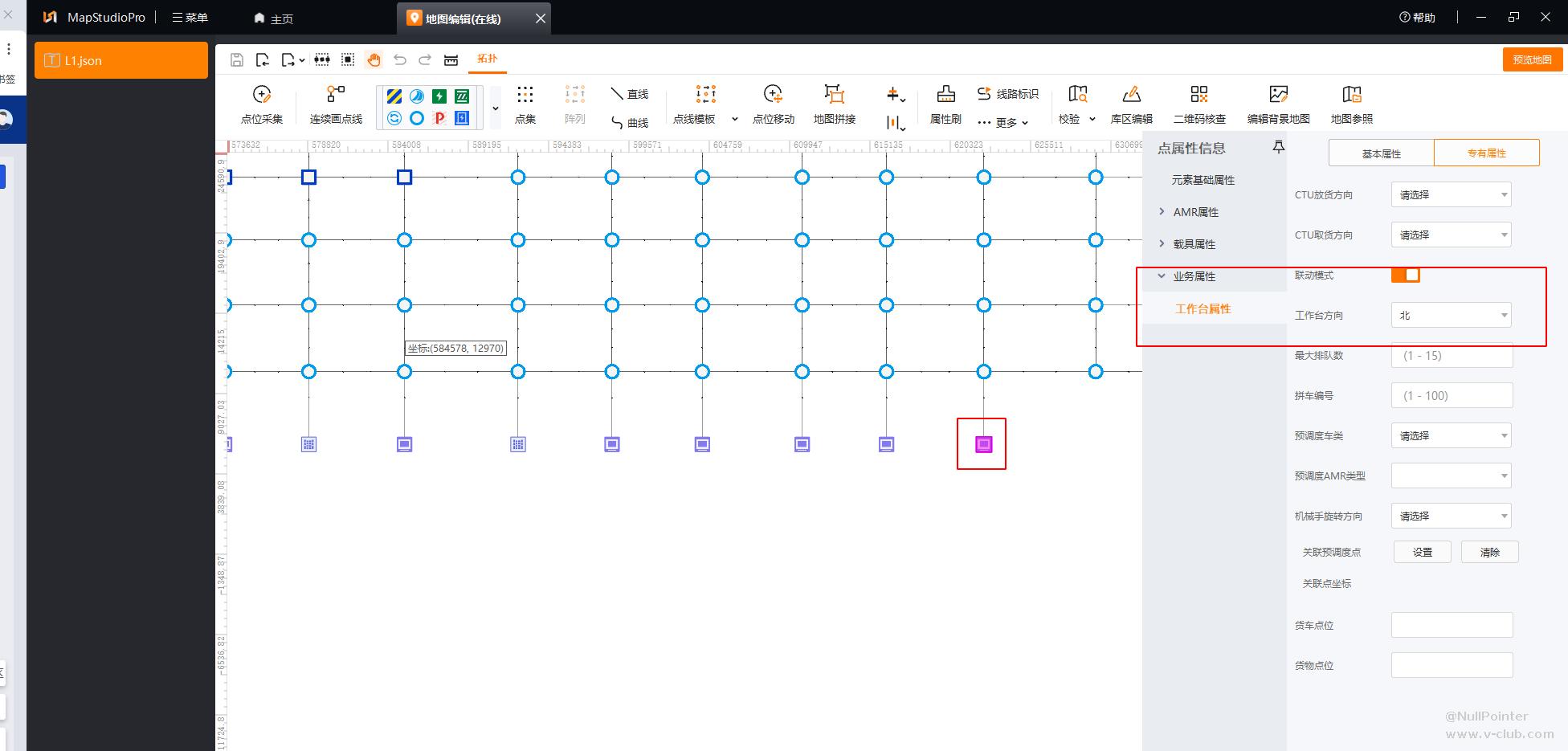
东:0 南:-90 西:180 北:90
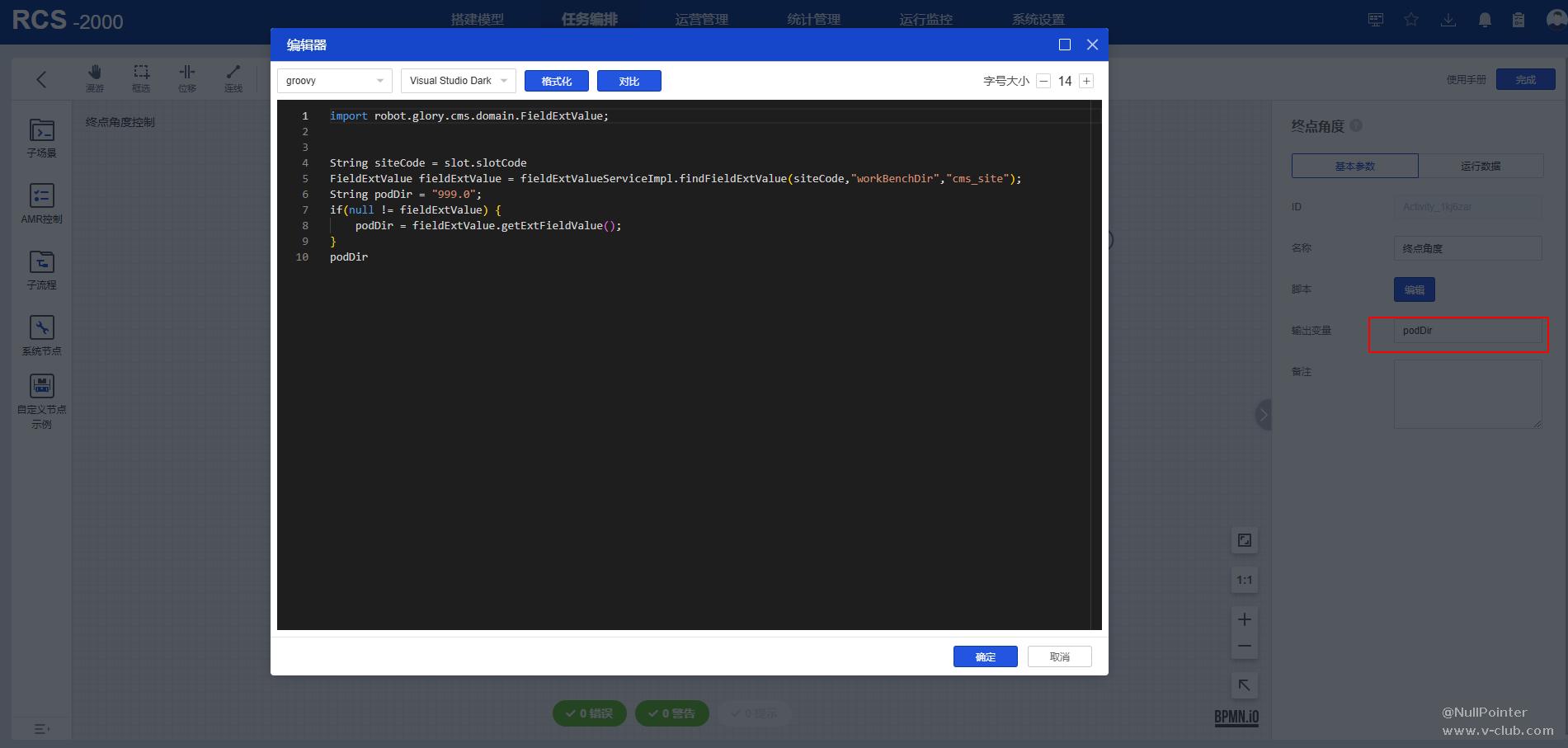
通过脚本获取终点slot中配置的工作台角度
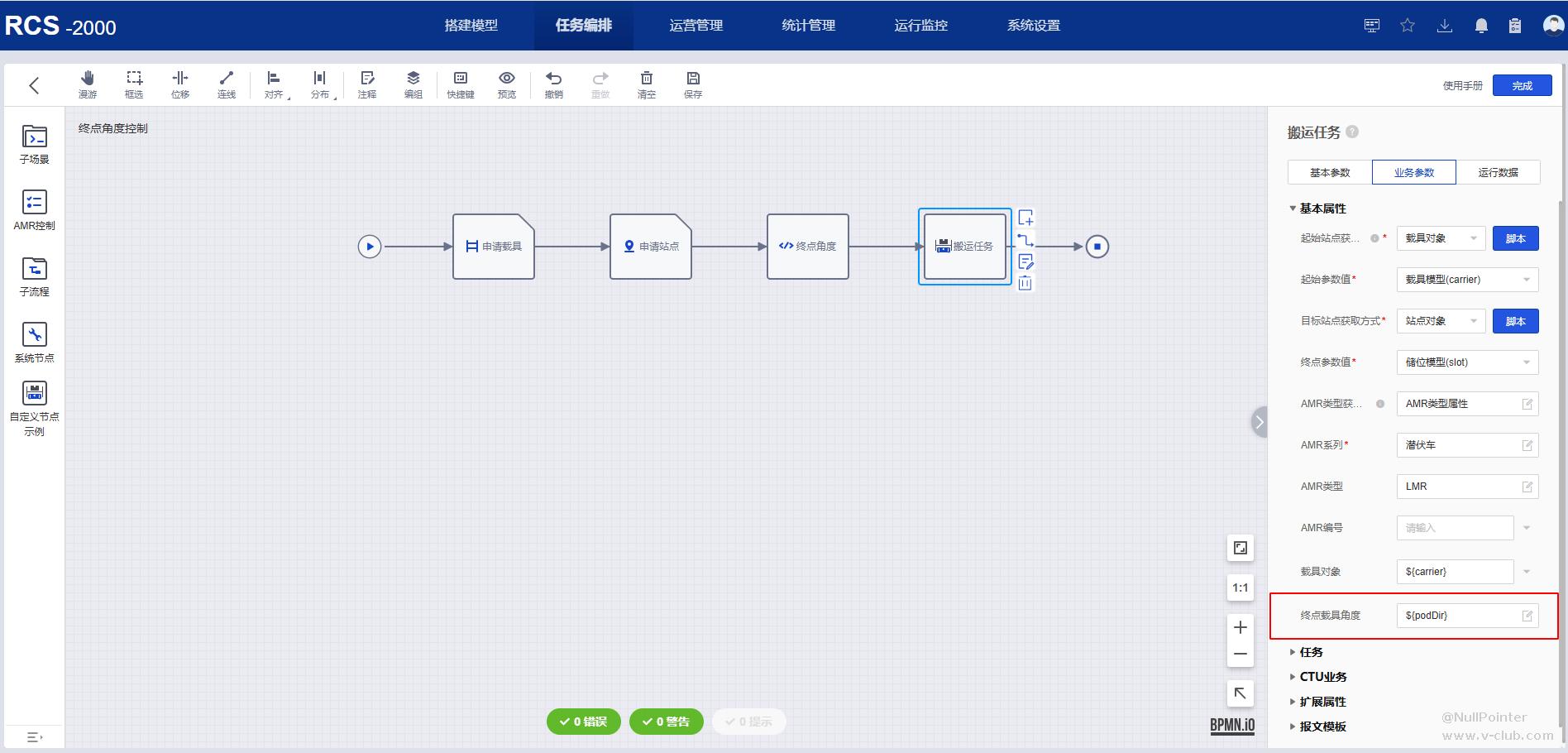
在任务中设置该角度
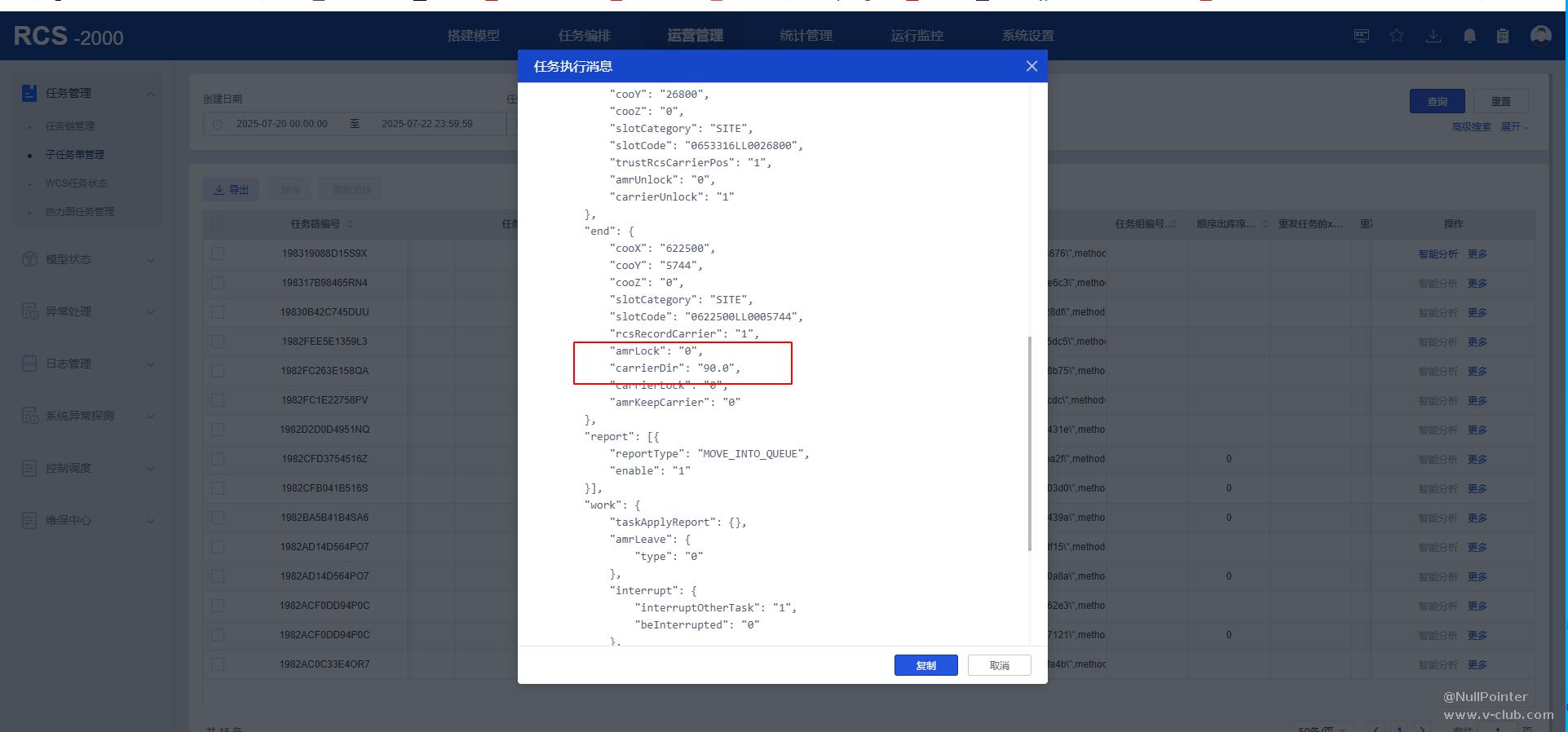
任务中的角度核查
附件中是一个简单的示例,供参考
附件:
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
上一篇
下一篇
评论请先登录 登录
全部评论 0


相关阅读
 海康机器人工业相机常用参数功能设置与获取(持续更新全-C语言)2025-09-29
海康机器人工业相机常用参数功能设置与获取(持续更新全-C语言)2025-09-29 【第四届启智杯】报名后如何筹备比赛?一份让你赢在起跑线的保姆级指南2025-10-15
【第四届启智杯】报名后如何筹备比赛?一份让你赢在起跑线的保姆级指南2025-10-15
 浙公网安备 33010802013223号
浙公网安备 33010802013223号