- 2388
- 0
- 分享
- 2022-08-12 15:16
一、案例背景
客户需求:
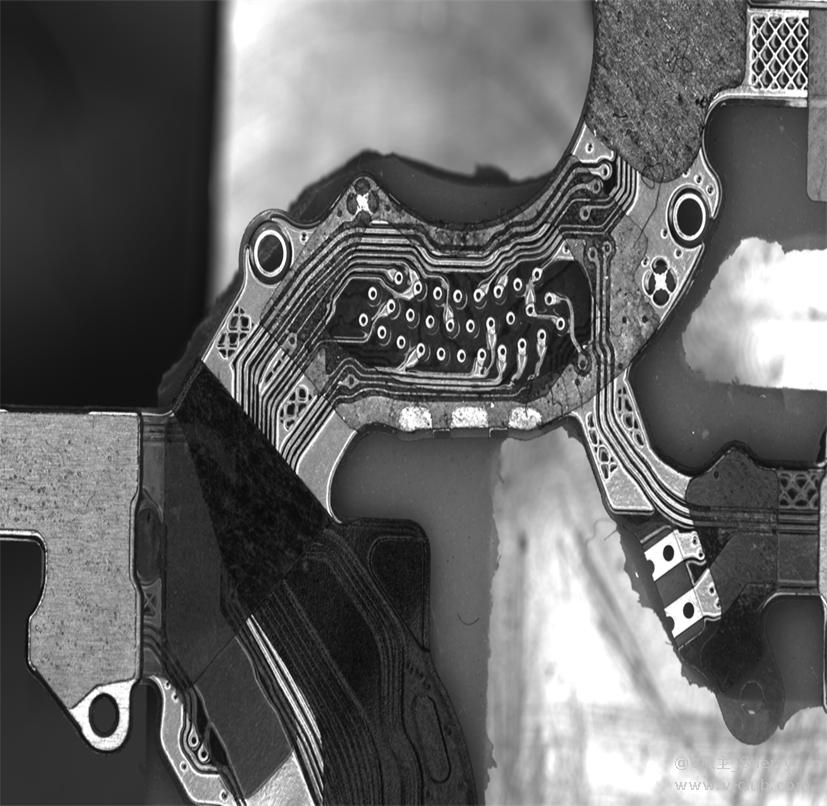
客户设备主要用于组装华为手表的电路板,需要视觉实现定位及读码功能。视觉使用两个相机定位FPC和贴装底座位置,引导运动机构将FPC贴装到底座上。
整体定位精度要求:0.1mm。
客户痛点或问题
FPC的贴合精度较高,假如贴合位置不准确,会导致电路板短路。且电路板造价较高,需控制生产过程材料报废数量,良品率要求99.5%以上。客户需要一种稳定、高效的方法来保证产品精准组装。
二、解决方案描述
项目配单表

方案示意图及方案思路描述
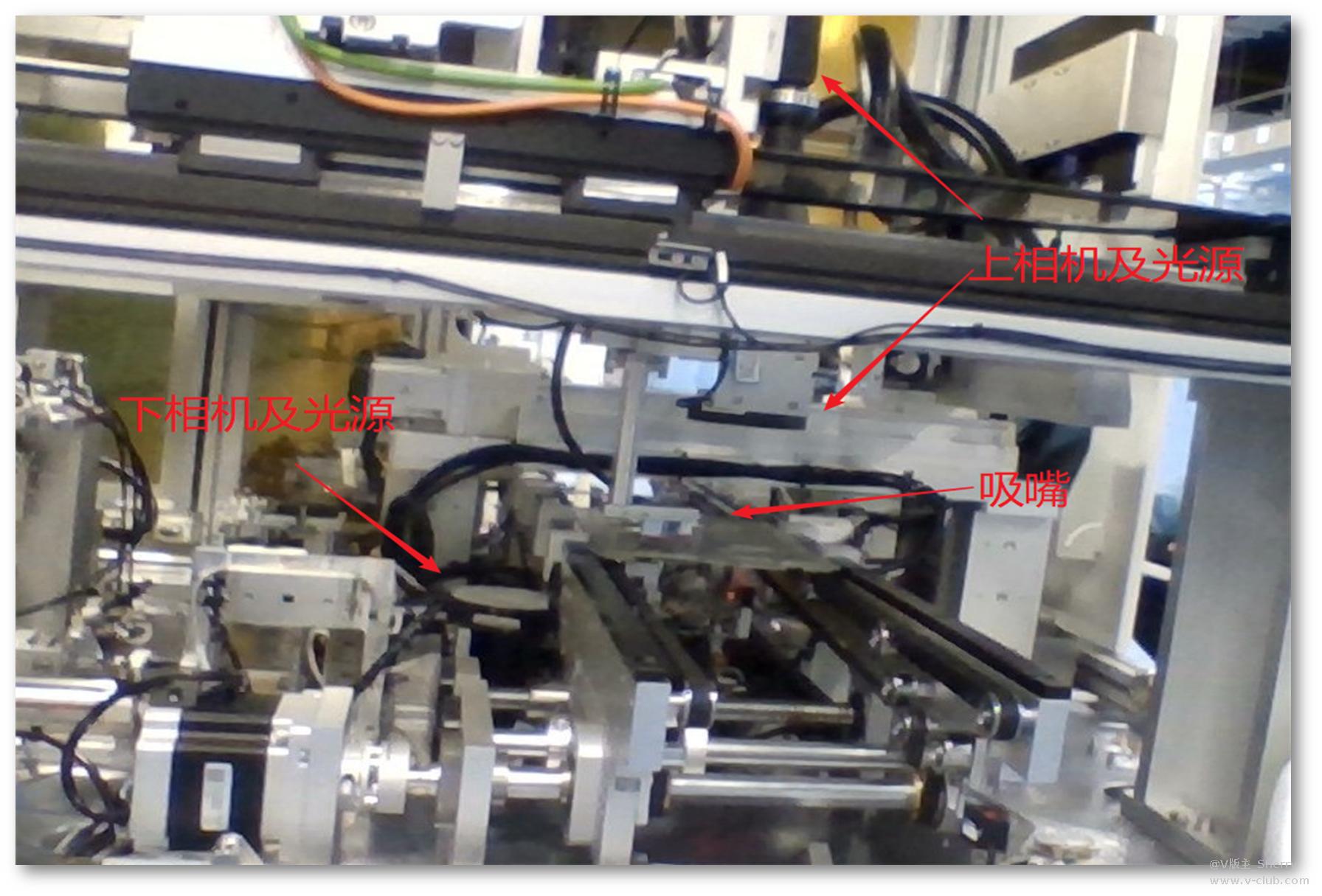
现场设备架设图

视觉计算产品位置偏差,整体流程可划分为标定、示教、偏差运算这三部分:
1.标定:统一坐标系。相机拍照得到的是像素坐标,而贴装机构移动的是物理坐标,所以需要通过标定来讲像素量转为物理量,让执行机构去执行
2.映射:建立上相机与下相机的坐标系关联。上相机拍摄底座产品,下相机拍摄FPC产品,为了计算两者的位置关系,需确定上相机与下相机图像坐标的转换关系。通过映射过程,获取上相机坐标与下相机坐标的转换矩阵,可实现将上相机坐标转换为一个等效的下相机坐标值。
3.做差:计算FPC产品位置与底座产品位置的差值。上下相机各自拍照,获取图像中产品的坐标,然后利用映射矩阵,将上相机坐标转换为下相机等效坐标值,计算出两个产品的位置偏差。
搭建与调试:
项目难点: 本项目计算上下两个产品位置偏差时,需要将两个产品坐标转换到同个坐标系下。
解决方案:利用相机映射算法,获得两个相机的坐标转换关系,由此将两个产品的位置坐标统一到同一个对物理坐标系,计算两者的位置偏差。
映射流程:两个相机获取同个特征物,计算特征物在相机图像中的相对位置,利用视觉算法获取上下相机间的坐标转换矩阵。
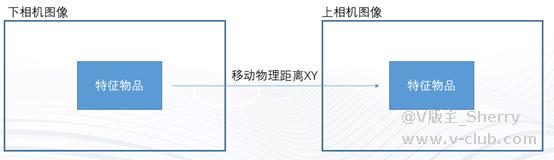
映射流程示意图
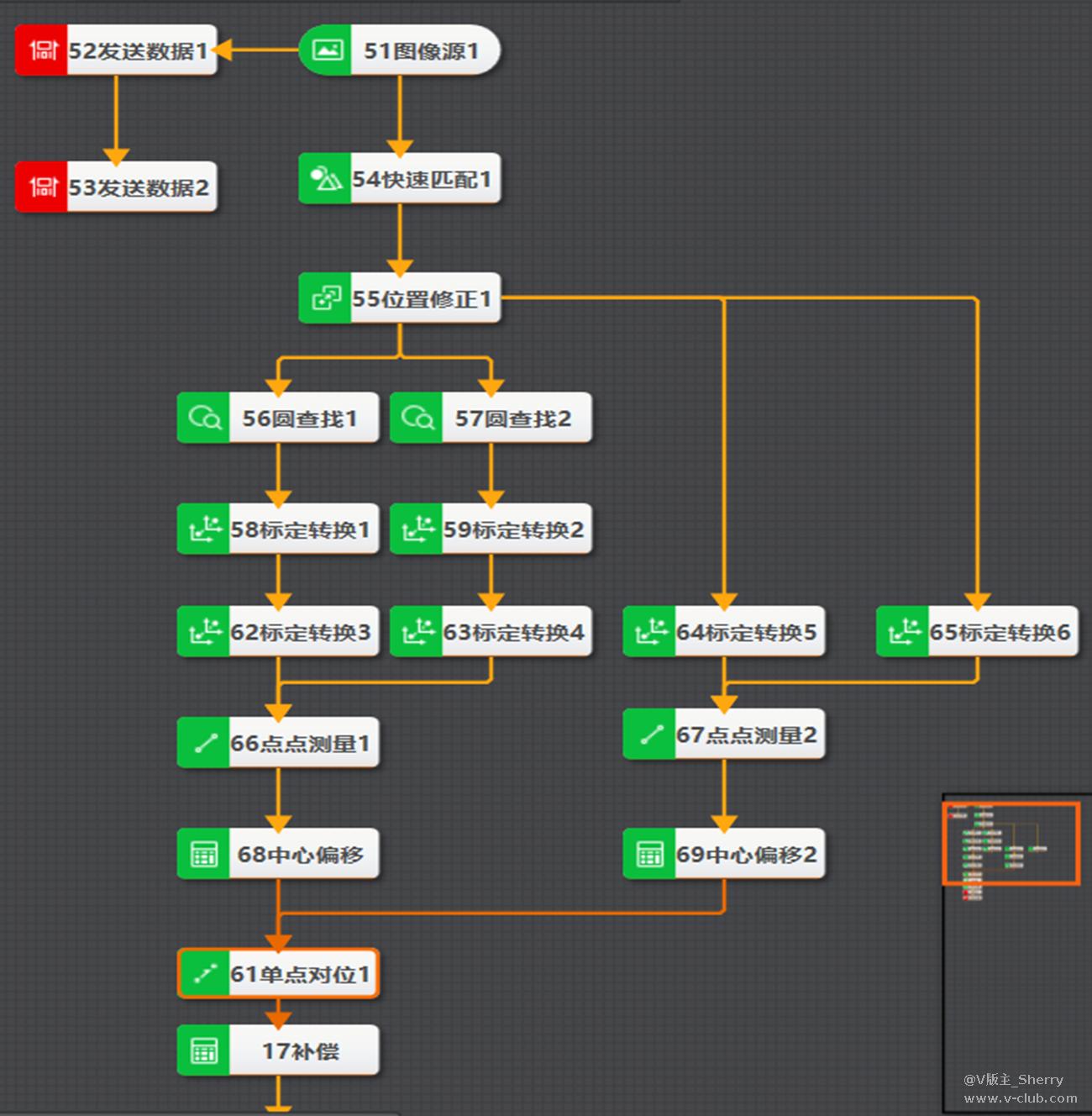
视觉流程共包括下相机手眼标定、上下相机映射标定、下相机拍照、上相机拍照定位及计算4个流程:
调试步骤1:搭建下相机手眼标定流程,完成12点标定过程,获取像素坐标与物理坐标的转换关系。
调试步骤2:搭建上下相机映射流程,下相机获取特征物品,然后将物品移到到上相机位置再次拍照,获取下相机与上相机的坐标转换关系。
调试步骤3:搭建下相机拍照流程,获取FPC产品坐标。
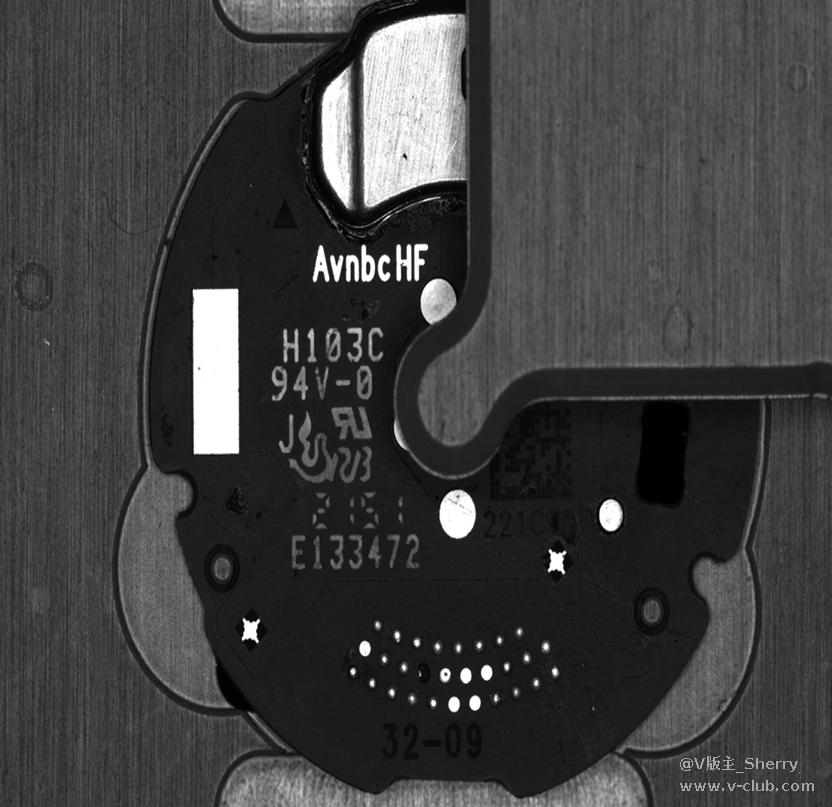
调试步骤4:搭建上相机拍照流程,获取电路板底座产品的坐标,然后通过坐标转换将两个产品的位置统一到相对物理坐标系,计算两者的位置偏差。将该偏差发送给机构引导组装动作。

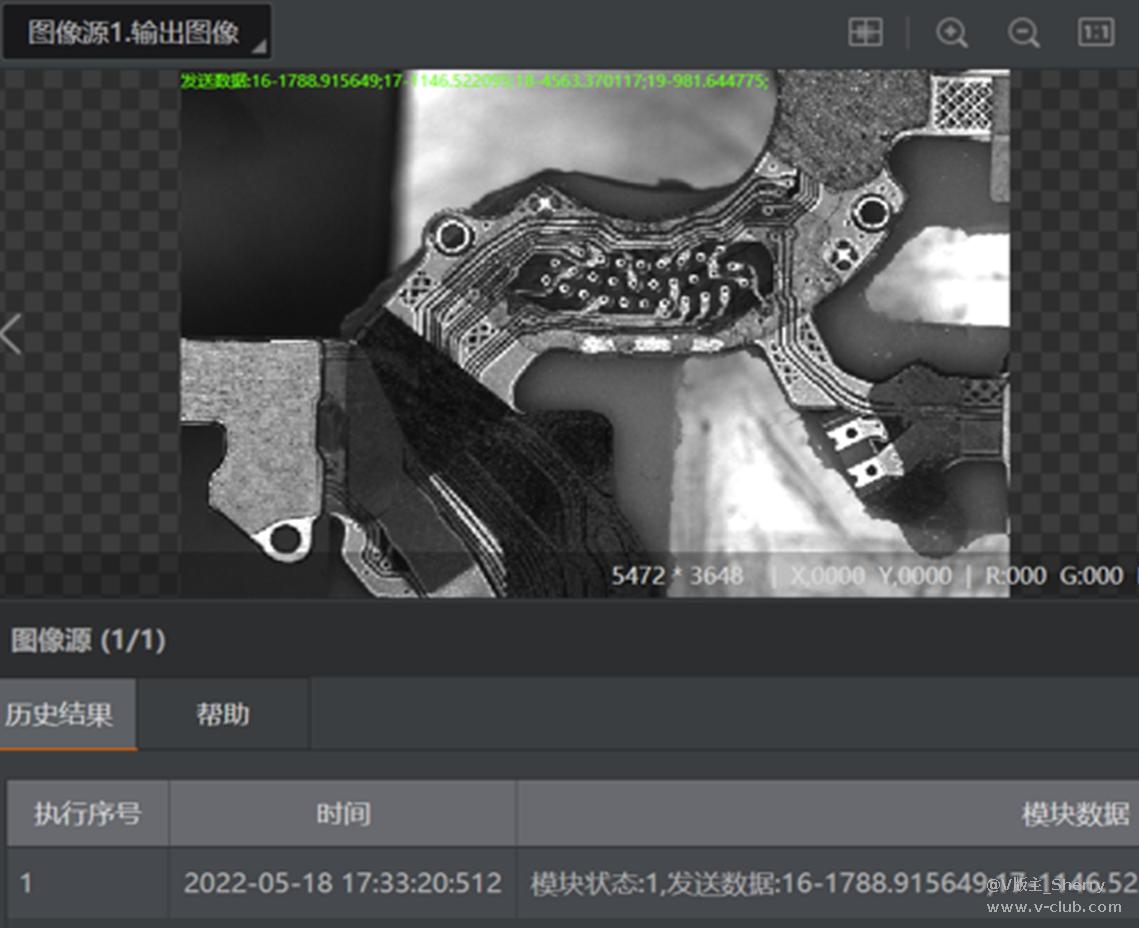
下相机拍照流程
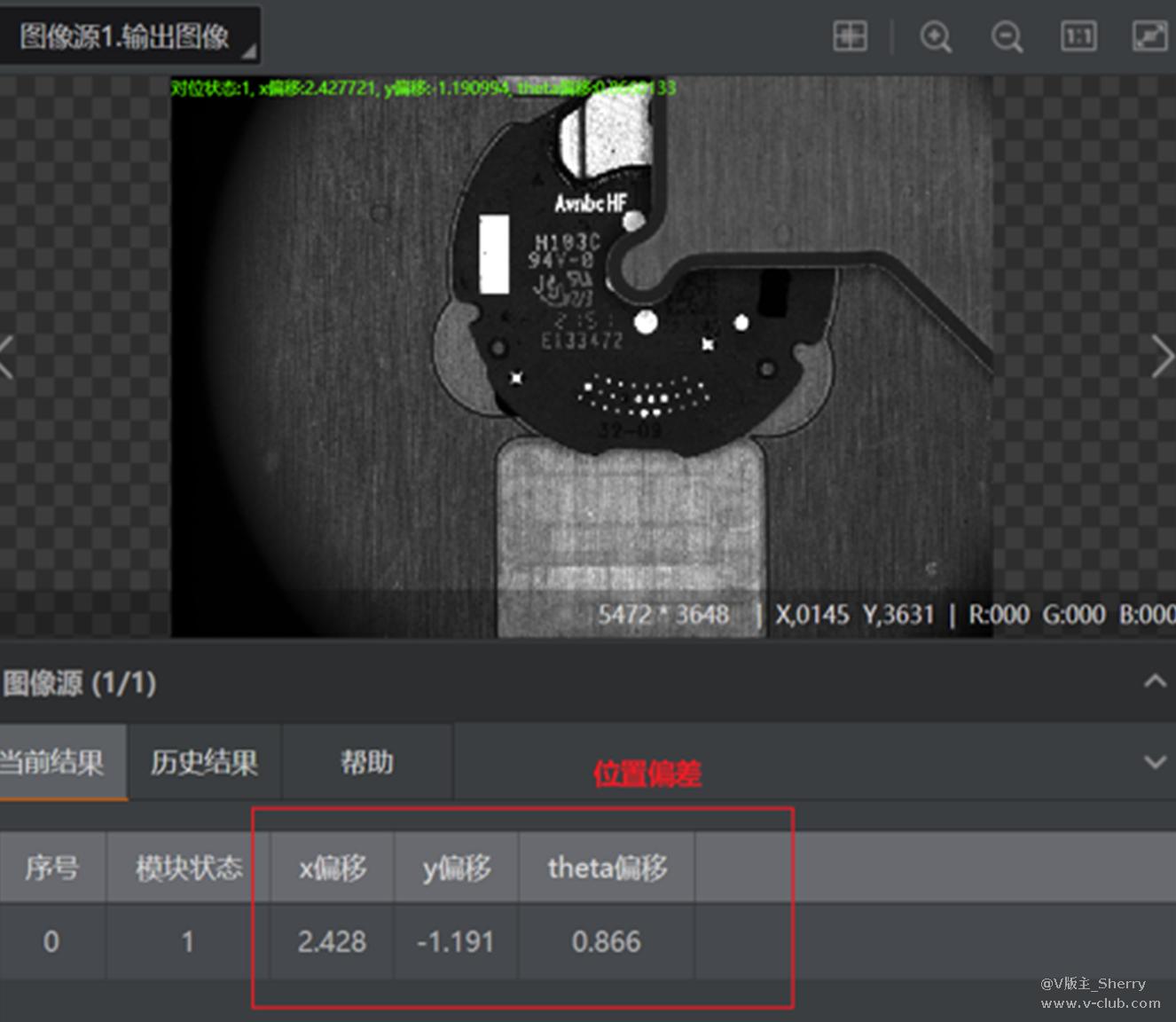
上相机定位及计算流程
三、方案优势
1.本方案可良好完成产品对位贴合功能,对位稳定,满足客户组装设备的应用需求。
2.通过此次项目,客户很满意视觉检测平台,已将海康机器人列为主要的视觉供应商,视觉项目会优先考虑VM算法平台。




 探寻机器视觉新星|第二届“启智杯”机器视觉设计大赛获奖名单公布2024-04-08
探寻机器视觉新星|第二届“启智杯”机器视觉设计大赛获奖名单公布2024-04-08 每日分享|3D视觉成像之双目立体视觉原理2024-03-21
每日分享|3D视觉成像之双目立体视觉原理2024-03-21 VM4.4更新亮点2024-04-12
VM4.4更新亮点2024-04-12 海康AMR应用场景中蜂鸣器的使用2024-04-03
海康AMR应用场景中蜂鸣器的使用2024-04-03 第二届启智杯—光伏电池片质检视觉方案设计2024-04-15
第二届启智杯—光伏电池片质检视觉方案设计2024-04-15
 浙公网安备 33010802013223号
浙公网安备 33010802013223号