- 0
- 0
- 分享
- 2023-05-29 10:03
1. 纹理实施
1.地面情况确认
选取建图车,使用连接线打开IDMVS连接小车确认下视相机的默认曝光参数下,是否可清晰肉眼看到地面: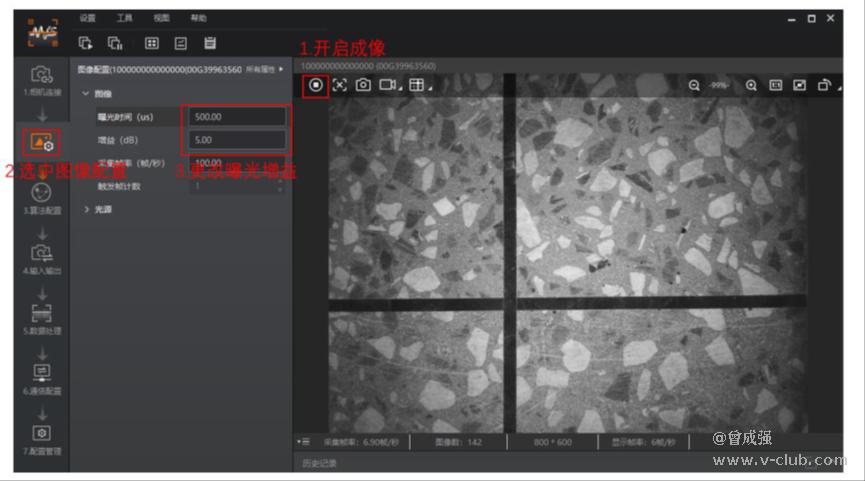
l 清晰的地面信息示例: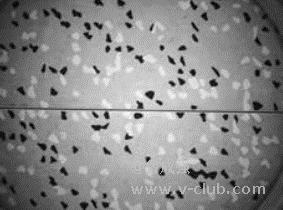
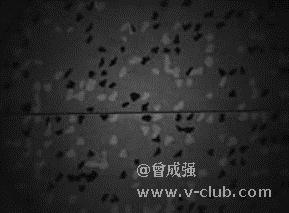
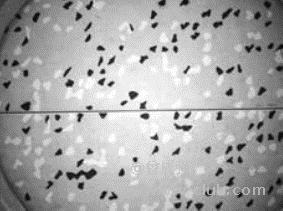
l 不清晰的地面信息示例:
下方左图:图像过暗(纹理图案过暗不能清楚看见)
下方右图:图像过亮(中间白色纹理图案过亮不能清楚看见)
过暗或过曝可使用RoboX修改小车曝光值增益调节
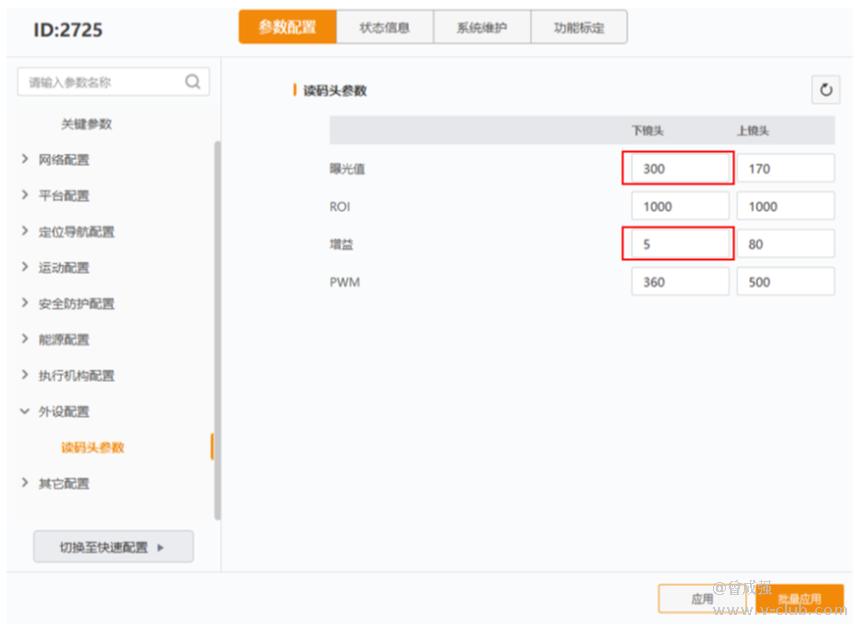
注意调节曝光值后,后续采集需要使用统一的曝光值进行采集。否则地图将无法合并
如有地面不符合纹理采集要求的,则需要添加地码。

色带要求:
1.色带宽度要求在5mm
2.深色地面采用白色色带,浅色地面则使用黑色色带。
2.线路实施
实施过程与二维码的实施类似,使用CAD图纸和现场确认之后,根据环境及需求,选择参照的墙面或柱子等,确定好小车运行路线。选好坐标起点,量好尺寸后对通道进行弹线(墨线颜色可以不用太深,尽量不要散墨)。墨线干后再粘贴上色带即可。
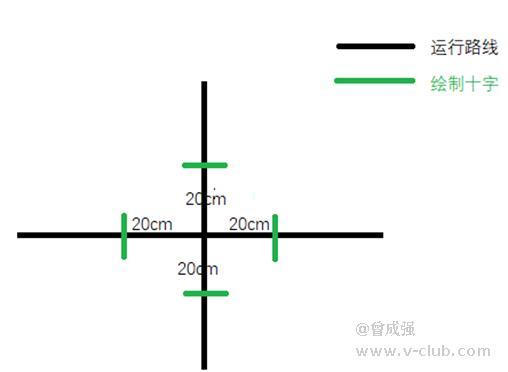
自定义间隔(最长5m)粘贴色带构成十字,十字半径5-10cm。且小车的旋转点需要使用色带粘贴十字,并在旋转点周围可前进方向上20cm处也粘贴上十字。
色带在采集完成后可以撕掉,但最好使用地码膜把十字贴起来做保留,减少后期维护工作。

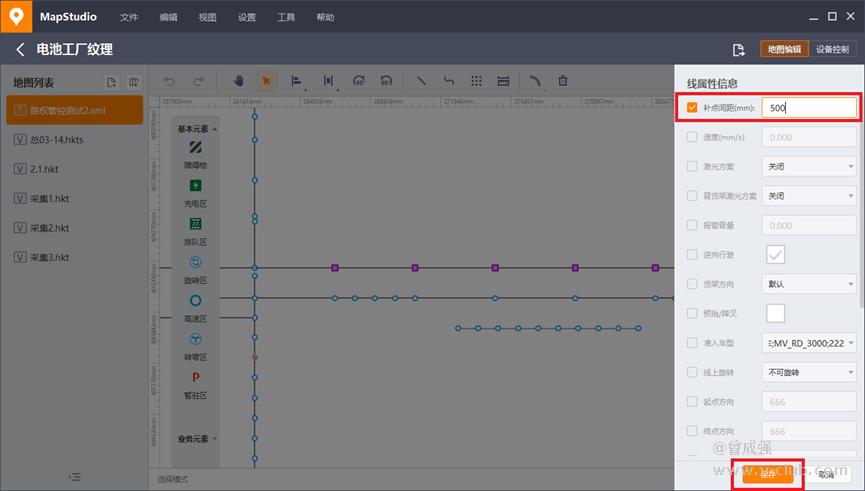
3.拓扑图绘制
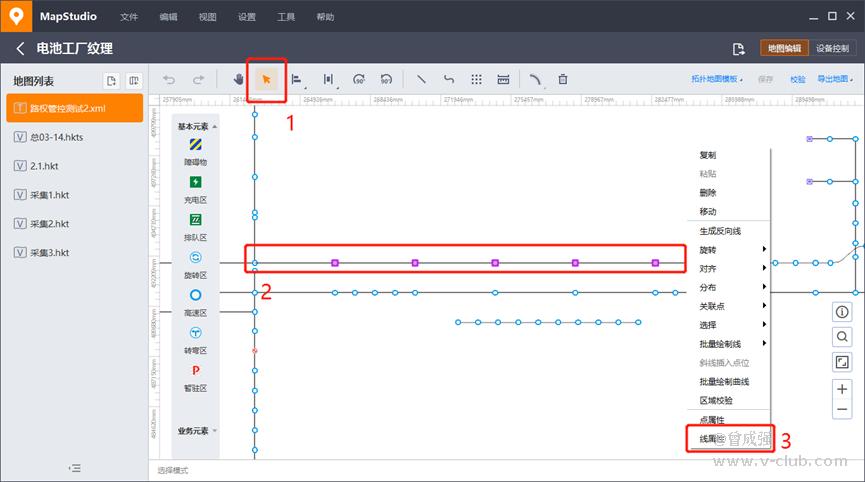
打开建图客户端,根据实际十字点位绘制拓扑图,线属性中设置补点间距为500mm(推荐),特殊场景(如走弧线)需要稠密建图可设置为150mm,并对相应点位属性进行设置后保存。

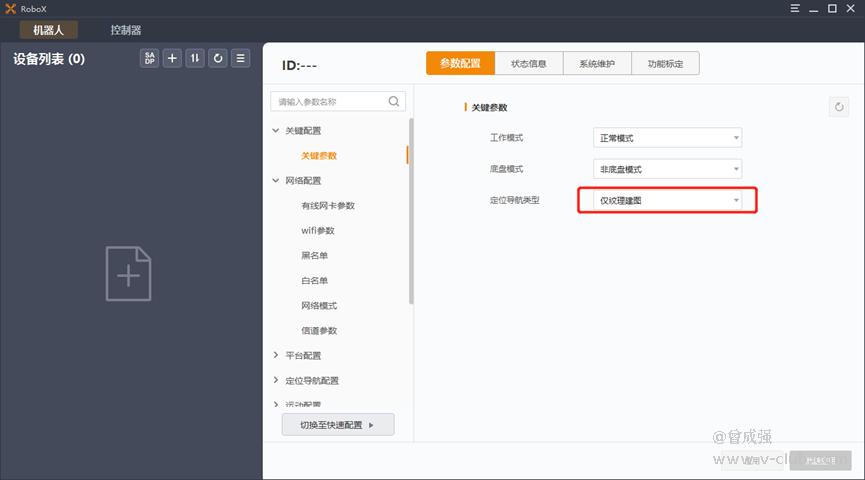
4.连接客户端
首先打开RoboX工具对应选择需要采集的小车,确认工作模式为:正常模式,修改定位导航类型为:仅纹理建图。
确认RCS平台类型为V1协议,如修改则需要重启小车生效

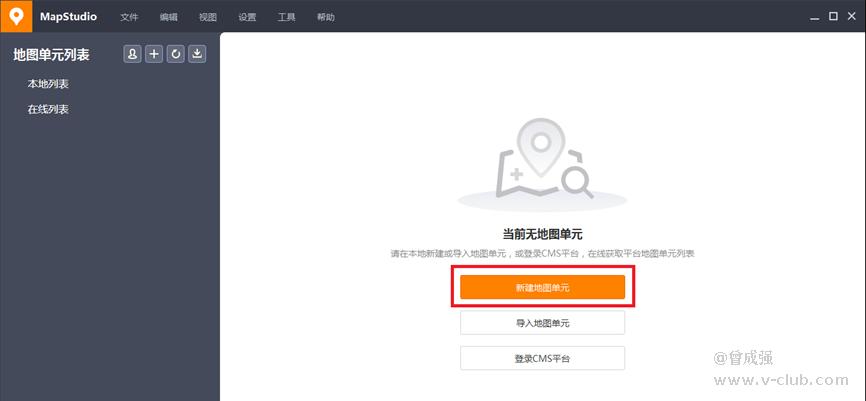
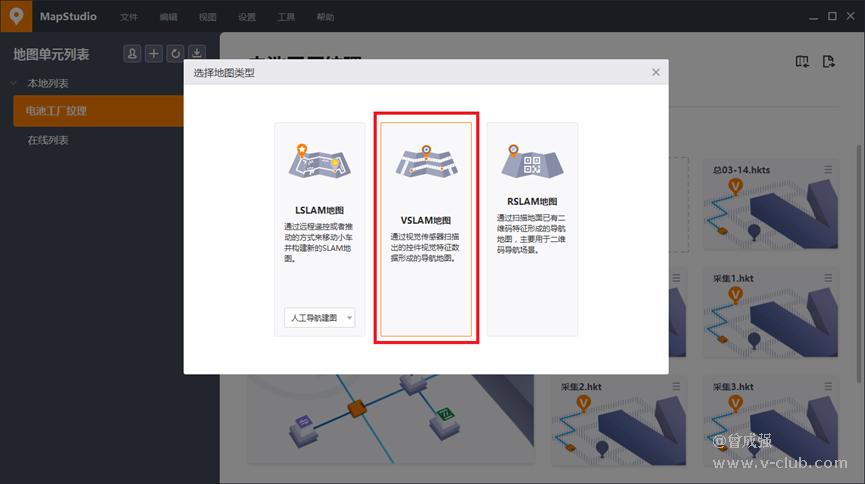
打开建图客户端,选择绘制好的拓扑图,新建运行地图

新增VSLAM地图
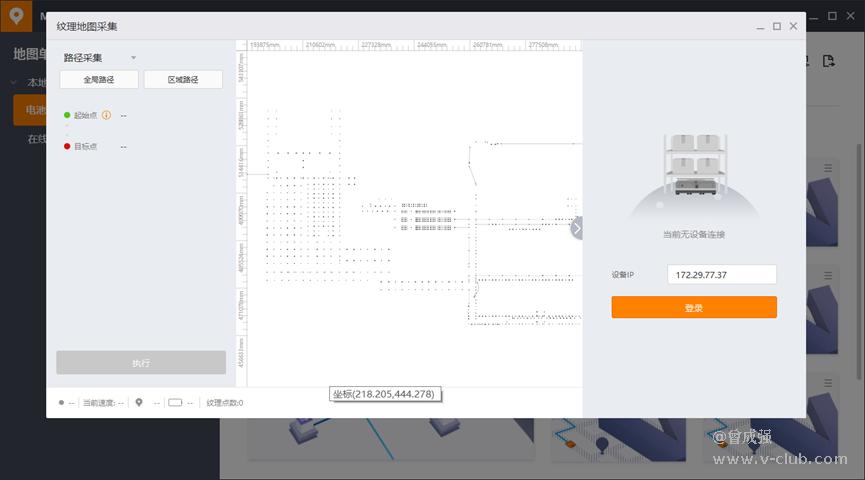
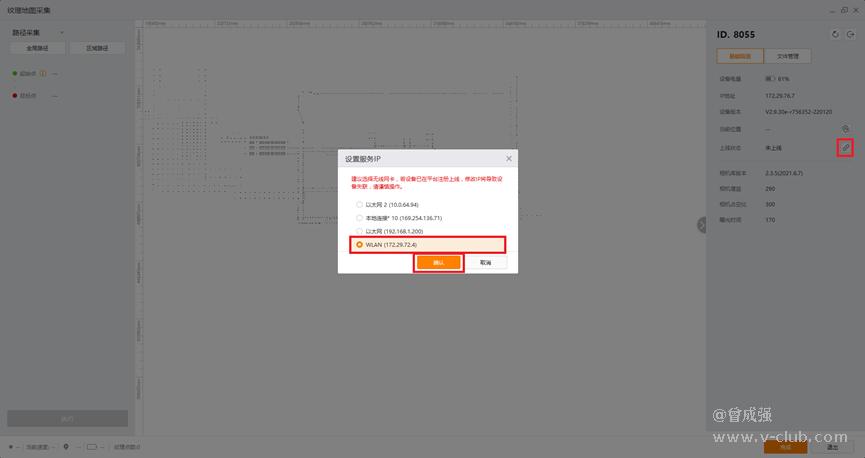
输入机器人ip,点击登录小车
点击上线状态,选择WLAN
5.客户端建图
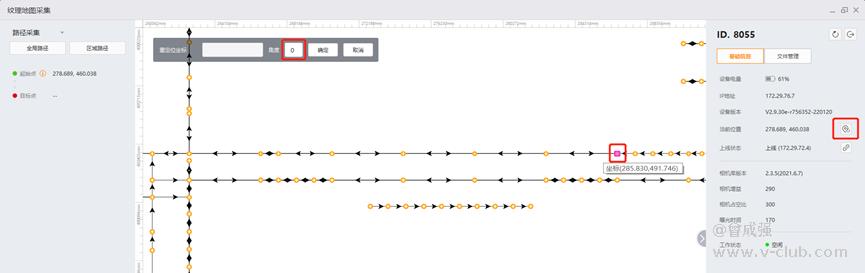
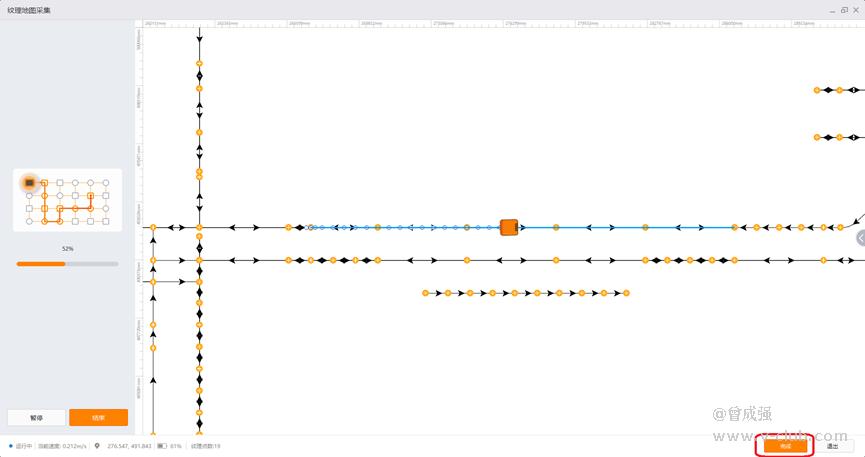
把小车推到采集的开始的十字上,读码头中心与十字中心对齐,误差控制在3cm内。在地图上定位小车位置及车头方向
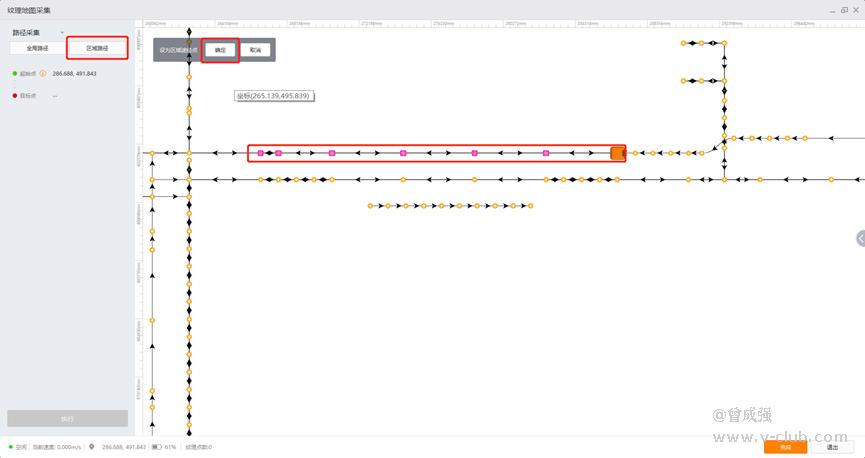
点击区域路径,框选需要采集的路径后点击确定
框选路径后点击执行,小车自动生成路径并自动进行纹理点数据采集
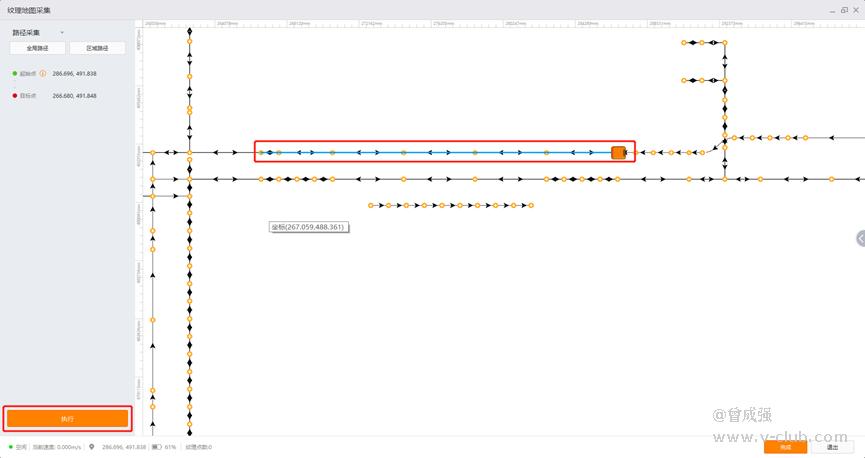
采集成功会生成白色小圆点,未采集成功的没有变化。采集完成后点击完成。
对于未采集成功的拓扑点点,观察地面十字是否完整,不完整进行补色带, 再对采集失败的路段重新采集。
框选需要设置上线的拓扑点位为上线区,点击确定。保存htk地图到本地
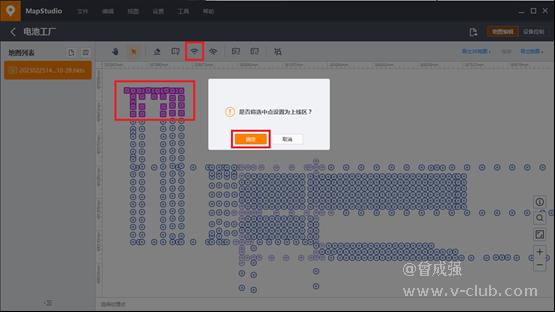
采集完后点击合并地图选择与其他采集完的hkt地图合并。合并后保存为hkts格式上传到rcms
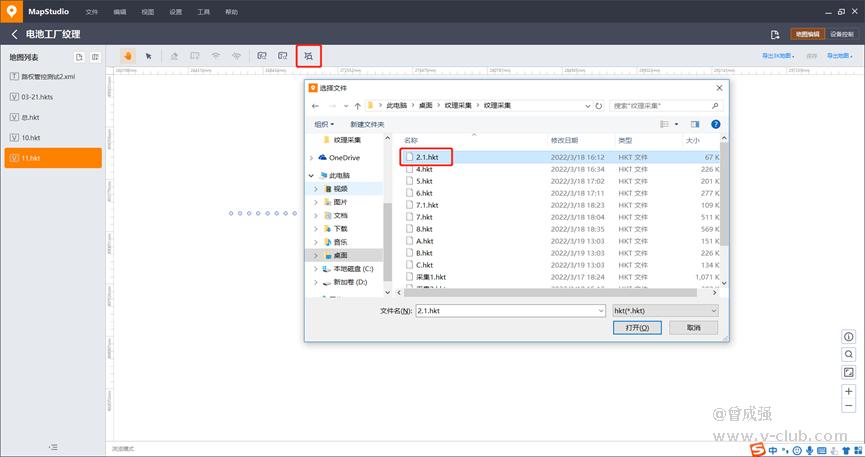
6.添加纹理地图到平台
进入“搭建模型”˃“系统配置”˃“场景配置”,启用“SLAM”,单击“确定”。

进入“搭建模型”˃“地图规划”˃“SLAM地图管理”,单击“添加”,选择地图、导航类型“纹理”,填入编号和名称。


单击“导入”,已构建的纹理地图。

7.添加机器人类型
机器人类型配置中导航类型选择“纹理”,其他与二维码导航配置一致。

8.添加机器人类型
HIK-Robox登陆机器人,配置“定位导航类型”选择“纹理-陀螺仪和里程计”。如果是纹理和地码混跑的则选择“纹理-二维码”。
采集完成后点击完成。

配置平台参数的ip及端口。(采集纹理的小车会自动变更平台ip及端口号)

9.机器人上线
将小车推到纹理上线点上,运行监控客户端MonitorClient,查看小车是否在线。


 一文带你入门RCS4.X-(4.2.8单独档)【任务编排】(四)2025-06-23
一文带你入门RCS4.X-(4.2.8单独档)【任务编排】(四)2025-06-23 秒懂VisionMaster!「VM助手」上线,有问必答的AI导师来了!2025-06-26
秒懂VisionMaster!「VM助手」上线,有问必答的AI导师来了!2025-06-26 AMR助手,你的技术外挂,上线啦!2025-07-03
AMR助手,你的技术外挂,上线啦!2025-07-03 魔都车展,海康机器人携最新“眼”技报道!2025-07-04
魔都车展,海康机器人携最新“眼”技报道!2025-07-04 VM3D应用-插针检测方案进阶讲解2025-06-21
VM3D应用-插针检测方案进阶讲解2025-06-21
 浙公网安备 33010802013223号
浙公网安备 33010802013223号