- 1150
- 0
- 分享
- 2024-03-05 20:06:53
一,项目背景
(1) 项目需求
1,检测连接器插针有无断针。
2,检测插针有无歪斜,检出精度0.15mm到0.24mm的歪斜。
3,检测插针高度。
4,Grr测试和相关性测试要求10%以下。
(2) 检测样品

(3) 客户痛点
1,节约成本,提升设备竞争力。
2,自主开发软件耗时久。
3,原有的2D方案无法满足断针检测要求,漏检率高。
二,方案描述
(1) 项目配单表
|
物料 |
型号 |
数量 |
描述 |
|
相机 |
MV-DP3060-01H |
3 |
3D相机 |
|
加密狗 |
iMVS-VM3D-6300 |
1 |
3D软件加密狗 |
|
工控机 |
MV-IPC4794-128G2T-0206 |
1 |
IPC工控机 |
|
网卡 |
MV-GE2204 |
1 |
拓展网卡 |
(2) 方案示意图
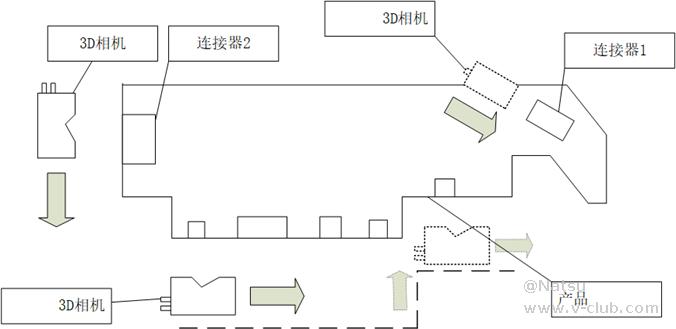
(3) 搭建与调试
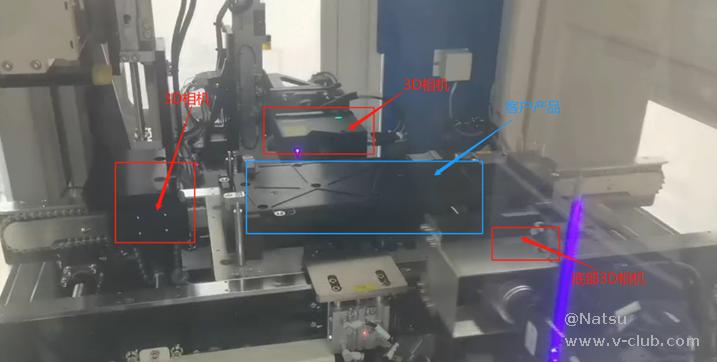
<1>.硬件设备搭建:
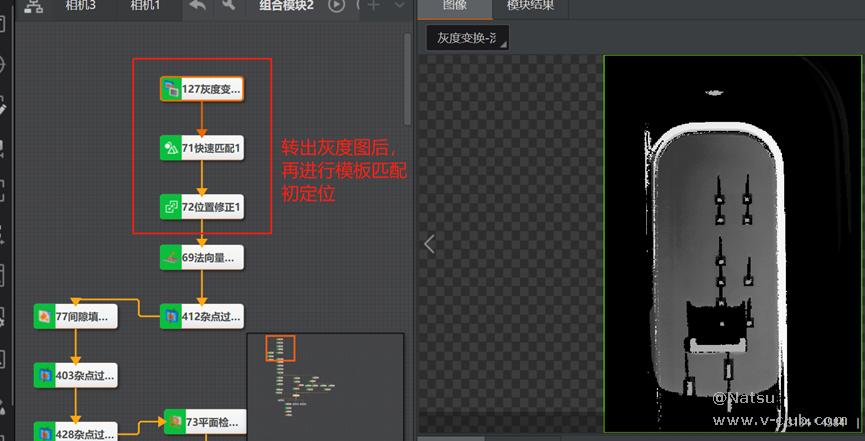
<2>.软件方案调试:
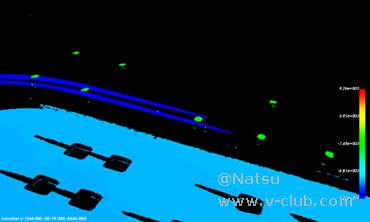
1)采集图像后,先做杂点处理,然后对图像转2D灰度图后进行模板匹配初定位。(此处不用亮度图的原因是成像效果不同产品间会有差异,容易造成定位精度不够)
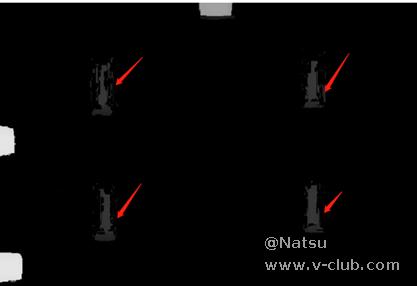
2)对要求的检测位置定位后,由于插针会有反光的杂点,会影响到重复性检测,因此,需要对3D图像进行法向量过滤和杂点过滤的预处理减少杂点干扰。
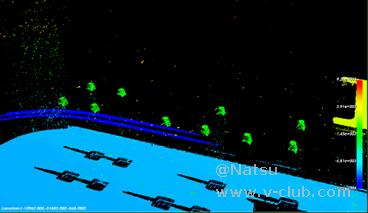 (过滤前)
(过滤前)
 (过滤后)
(过滤后)

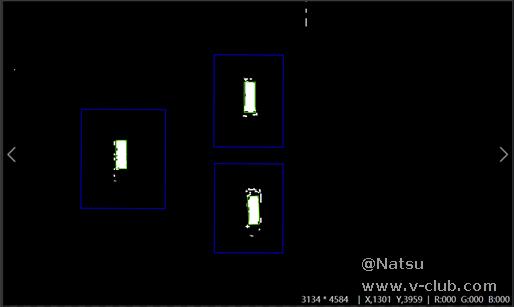
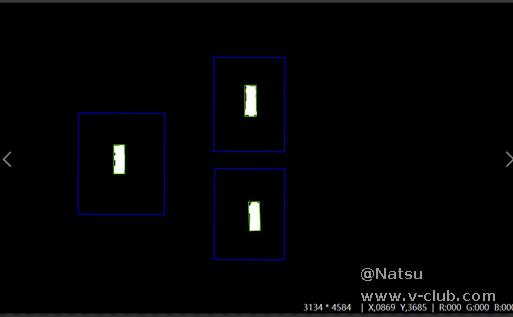
3)通过建立基准面后,对插针的高度区间范围进行二值化处理,转成2D图像进行插针位置定位。

4)用几何创建工具,按顺序绘制插针的检测区域和检测顺序,然后传入循环工具进行按顺序检测插针高度和位置。

5)循环工具中,需要先用形态学处理(使用开环或者闭环算法),对插针的灰度图做预处理,再用blob模块的质心点进行位置检测。(如果不用形态学预处理,那么容易杂点干扰影响位置度的重复性)
 (过滤前)
(过滤前)
 (过滤后)
(过滤后)

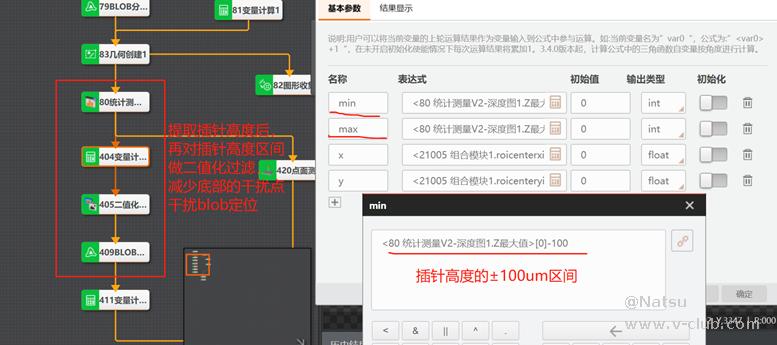
6)该现场由于插针平面比较大,成像跳动对blob的偏移容易影响很大,针对动态重复性的提升,额外再增加了提取插针高度后,对高度区间再进行二值化。
7)提取高度,位置度后传入脚本工具里面进行处理,针对断针漏针时blob没有检测到的情况下,补000坐标输出,避免输出错位。

8)增添图形收集工具,便于直观看出检测插针的顺序。
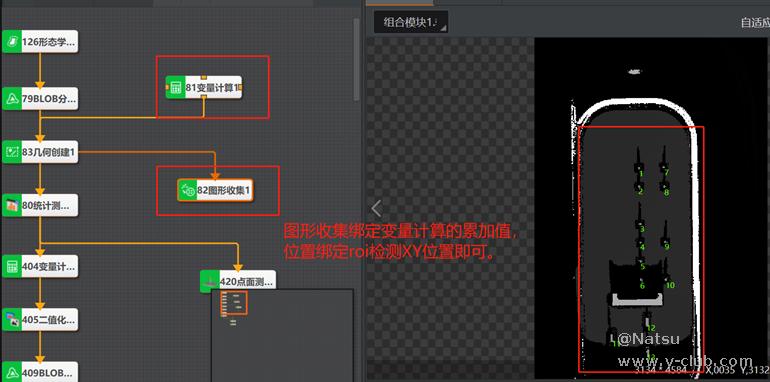
9)另外,通过高度二值化图像后,进行mark点定位,便于插针位置和mark点位置做XY距离检测。(当前项目客户上位机拿到原始的XY坐标后,做距离检测。也可以通过VM脚本模块,做距离检测)

10)最后把整体的结果数据,按客户的格式要求,通过TCP协议发送到客户上位机软件上进行处理。
<5>.方案难点和解决方式。
难点1:客户侧面3D相机要扫描5个连接器的插针,连接器插针高度有区别,且行频有要求,因此要切换ROI的行高参数,对扫描不同位置的连接器ROI变动时进行切换。但相机参数配置模块耗时久,大概1400ms,会影响CT节拍。
解决方式:耗时长主要因为模块调用了Stop和Start取停流接口,通过定制相机固件,支持相机在深度图格式下,设置ROI的行高值。同时,软件模块参数配置上,调用Acquisition Start/Stop接口进行参数切换。整体模块耗时在200ms内,满足现场节拍。
难点2:客户产品其中一个连接器成像效果不稳定,边缘杂点较多。影响位置度的重复性精度。
解决方式:更新带4K功能的新固件,通过连续滤除窗口的功能,把插针斜坡的成像杂点去除,达到图像稳定的效果。
 (插针原图情况)
(插针原图情况)
 (固件更新前,边缘斜坡杂点干扰)
(固件更新前,边缘斜坡杂点干扰)
 (固件更新后,边缘斜坡被干掉,成像一致性稳定)
(固件更新后,边缘斜坡被干掉,成像一致性稳定)
 (新固件参数功能配置)
(新固件参数功能配置)
难点3:客户侧面3D相机需要扫描多个连接器,长度较大,一张深度图行高扫不全。
解决方式:相机的帧触发选用电平触发,扫描一个连接器持续一个高电平,分多段进行扫描检测。
4. 方案优势
1)现场生产110个/小时,直通率99.3%,过杀率1%(有个别针脚刚好卡在公差要求边缘)。
2)减本增效,本视觉解决方案产品软硬件高性价比。
3)方案搭建便捷,无需额外工程师进行算法开发,操作简易,生产人员即可进行日常维护,维护方便。


 汽车制造汽车行业丨3D解决方案丨胶圈缺陷检测浏览 3528
汽车制造汽车行业丨3D解决方案丨胶圈缺陷检测浏览 3528 汽车制造汽车行业|插针检测浏览 3100
汽车制造汽车行业|插针检测浏览 3100 汽车制造汽车行业丨3D解决方案丨胶圈缺陷检测(3)浏览 2253
汽车制造汽车行业丨3D解决方案丨胶圈缺陷检测(3)浏览 2253- 汽车制造汽车行业丨3D解决方案丨胶路缺陷检测(2)浏览 1933
 汽车制造应用案例|汽车行业-料框3D抓取浏览 1703
汽车制造应用案例|汽车行业-料框3D抓取浏览 1703
 浙公网安备 33010802013223号
浙公网安备 33010802013223号