3D激光轮廓仪对射拼接详解
- 0
- 3
- 分享
- 2025-09-01 16:12
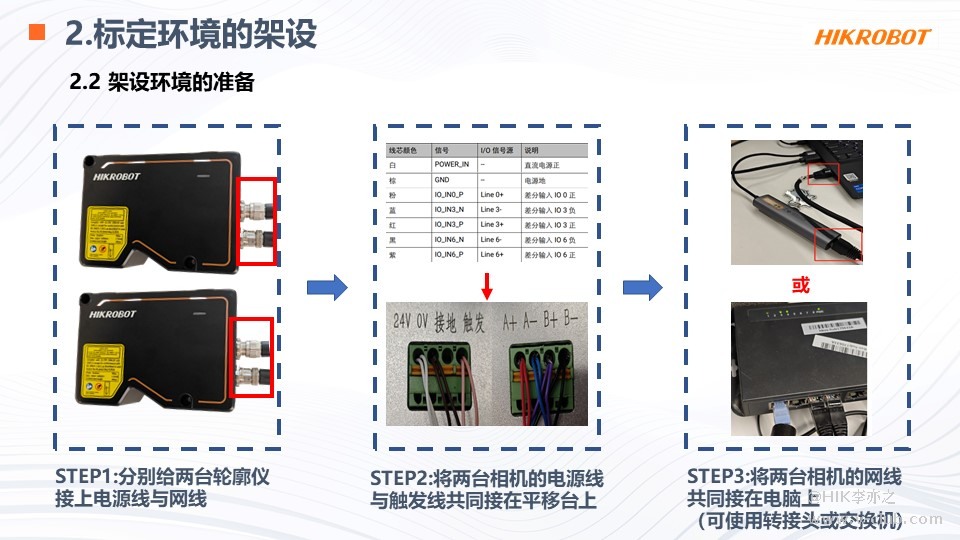
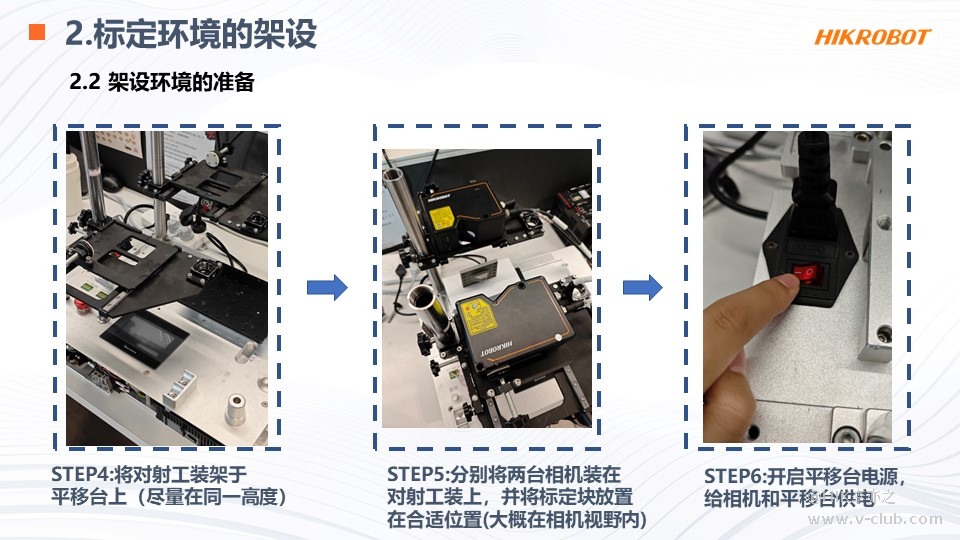
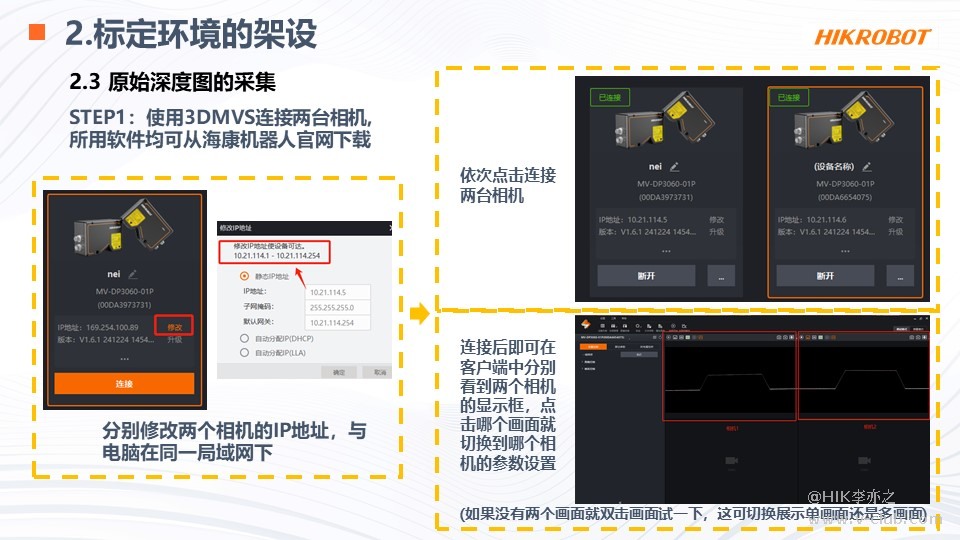
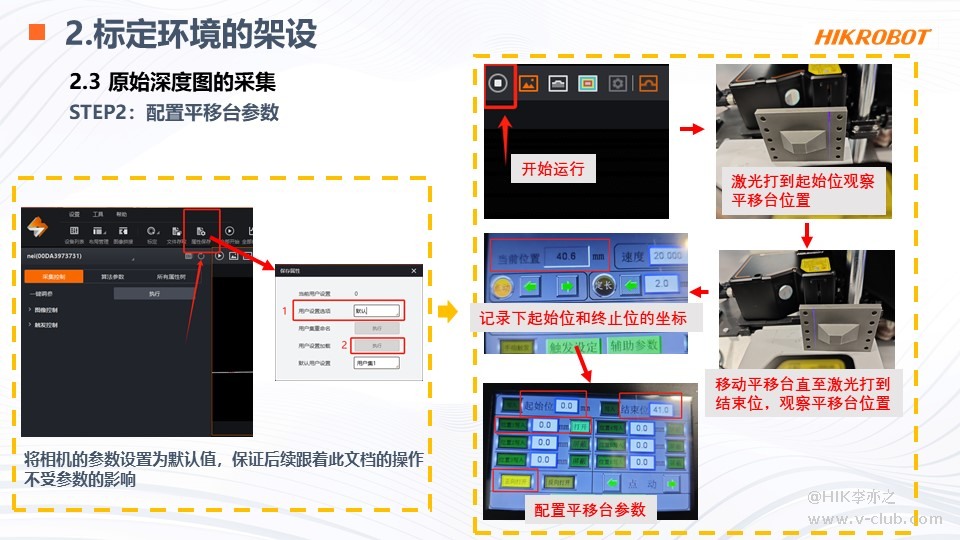
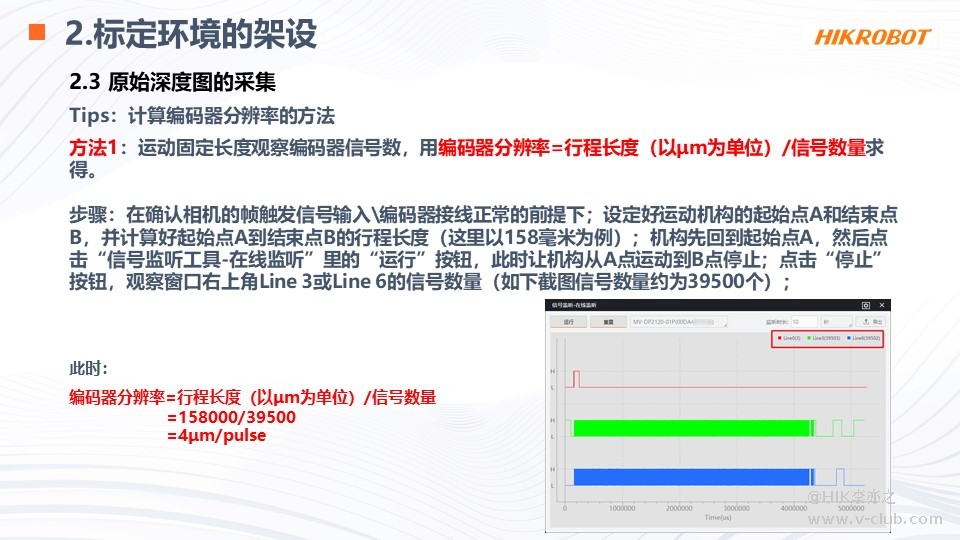
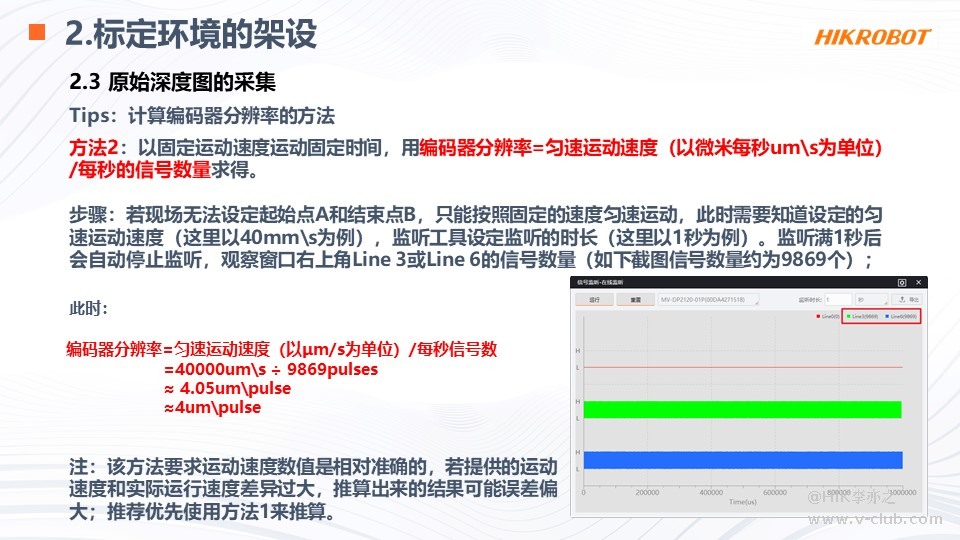
本文针对3D激光轮廓仪的对射标定进行前期准备、步骤讲解、常见问题解析,帮助大家更快掌握多相机应用
多相机拼接应用中有多种类型:对头、并列、环视和对射
双相机对头扫描拼接(消除Y轴方向盲区)
适用条件:
1、对测试的样品需要完整成像(单相机扫描由于三角成像原理,在Y轴方向上会存在盲区),可以采用对头扫描拼接来去除Y方向的盲区
2、目前已经推出双目单线的产品:MV-DP2060-01D(如右上角),后续的相关产品会持续推出,敬请关注官网产品更新
双相机左右并列拼接(增加X方向测量范围)
适用条件:
1、测试的精度要求较高,大视野的单相机在X轴测量范围上满足,但是Z轴精度无法满足,可使用小视野高精度的相机并列拼接来实现
2、使用单数据源拼接扫描行程较多,节拍较大,可采用并列拼接来降低节拍
环视拼接(不规则样品的整体轮廓数据获取)
适用条件:因轮廓仪单个相机视野有限,若想呈现圆柱表面、棱柱表面、或其他体状表面纹理时,需要用到多个相机在不同角度去拍摄,需要使用拼接标定,将多个相机坐标系联立,从而拼接成完整的立体点云
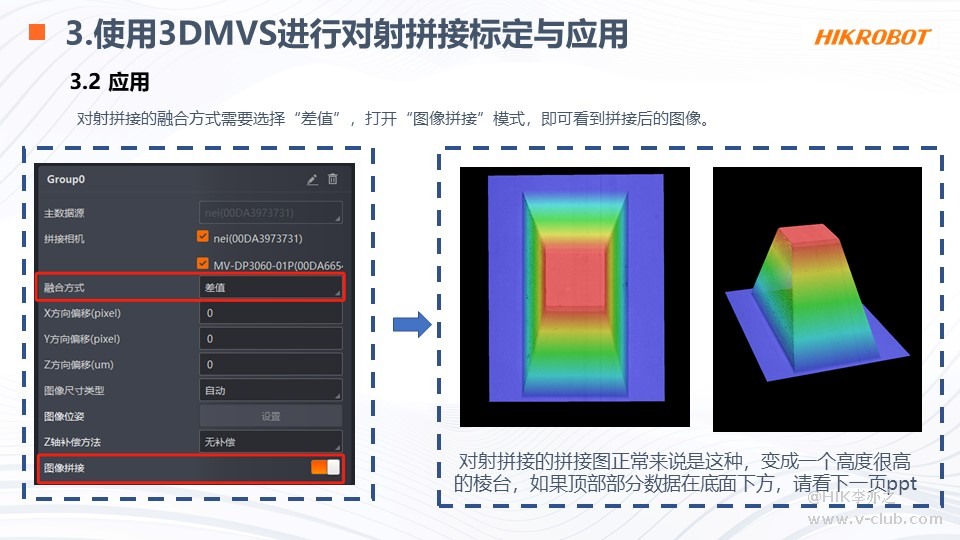
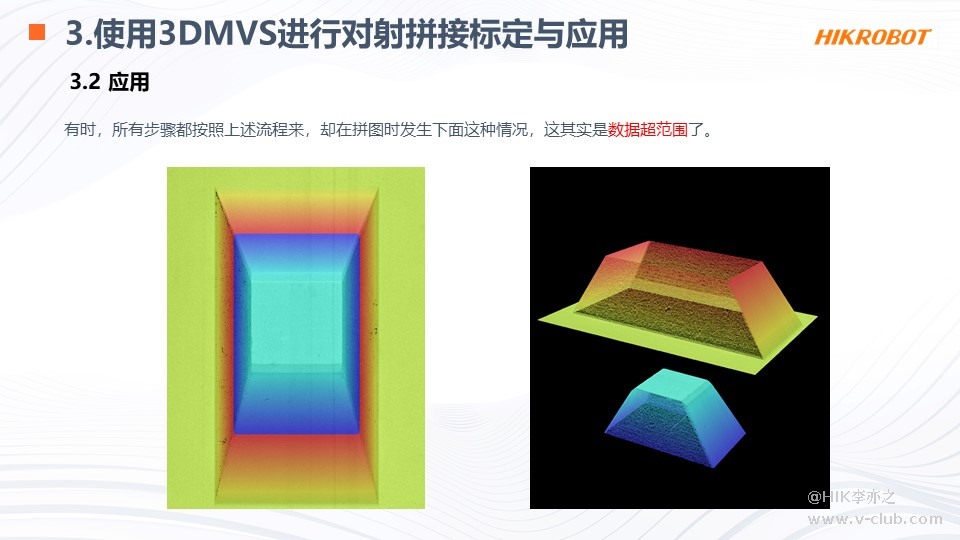
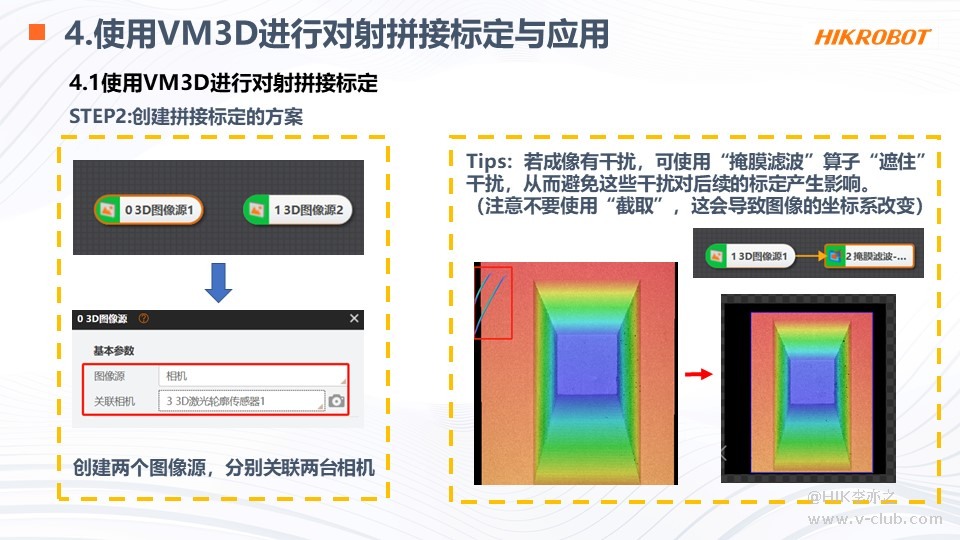
双相机对射拼接(测试厚度)
适用条件:需要测试样品的厚度,对样品整体的厚度数据进行分析,可以采用对射拼接来实现
多相机应用因为涉及多个相机之间的标定,操作相对复杂,问题点杂糅,较难分析;很多朋友在刚接触多相机拼接应用时,很难快速掌握,今天我们针对多相机应用中的对射标定,进行详细讲解,希望能有帮助

















附件:
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。

评论请先登录 登录
全部评论 3

- 1

相关阅读
 【技术分享】VM运行界面之清空图像2026-06-10
【技术分享】VM运行界面之清空图像2026-06-10 PoeLink-AI实施小助手2026-06-18
PoeLink-AI实施小助手2026-06-18 拒绝踩坑!海康读码器串口通讯全链路实战:从硬件接线到触发指令配置2026-06-16
拒绝踩坑!海康读码器串口通讯全链路实战:从硬件接线到触发指令配置2026-06-16 使用VM算法识别屏幕2026-06-05
使用VM算法识别屏幕2026-06-05- 认证刷题与模拟考试系统2026-06-12
 浙公网安备 33010802013223号
浙公网安备 33010802013223号