【第四届启智杯大赛决赛】+3D-PR赛道+重在参队+参赛作品分享
- 0
- 0
- 分享
- 2026-06-16 10:09
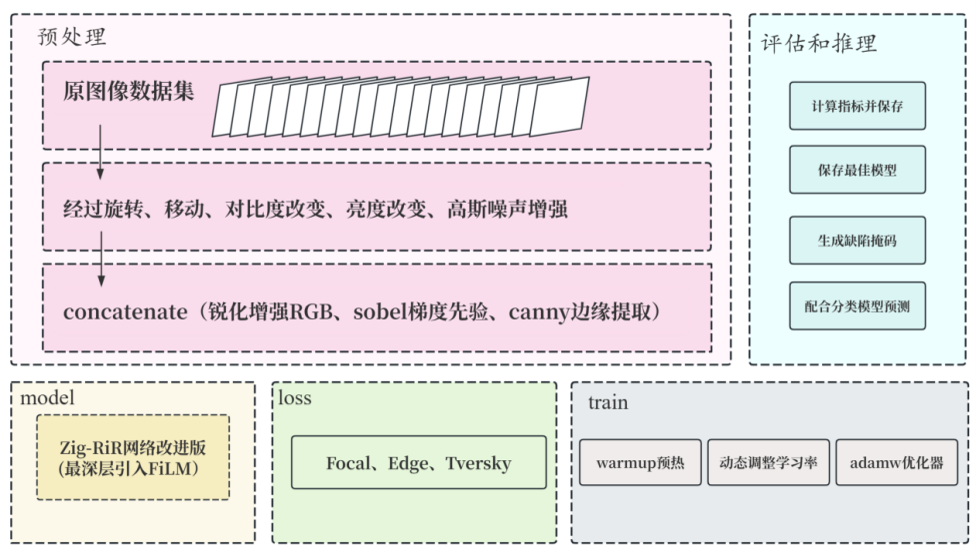
第四届"启智杯"机器智能大赛3D-RP赛道参赛完成作品的大致思路
我门参加的3D-RP赛道要求基于RobotPilot视觉导引平台,实现六轴机械臂对工件的三维辨识、定位拾取与码垛完整过程。满分100,我将任务分解为五大步骤逐一突破。
第一步,成像调节与手眼标定。借助Hiviewer客户端调校彩色图和深度图的画质,调节曝光增益确保无过曝或过暗,消除黑色噪点;随后用HiCalibrator完成手眼关系校准,核心是让采集点位遍布相机全视场,把平移误差压缩在1mm以内,这为后续所有图像算法提供精度保障。
第二步,场景与识别工序搭建。在RobotPilot中导入机械臂模型、末端工具、真实相机、工件、托盘及障碍物。该工序的重点是对点云做预处理后,实现料框和托盘的稳定辨识——要求无误定位、无漏定位,重复定位精度小于0.2mm。同时输出供避障用的场景点云,设定远端优先的拾取次序与正确拾取姿态。
第三步,任务逻辑编排。先建立TCP Socket通讯(图像处理端192.168.2.1:7930与机器人192.168.2.64之间),确保收发机制无误。然后分别构建拾取与码垛两套作业工序,在仿真环境中完整运行不报错。关键加分项在于全局碰撞检测——末端工具、工件、场景点云间的避障全部开启;防错逻辑需应对非识别信号,并加入两次无结果重试机制。最后利用工具组合精简工序、添加分区注释,并自行设计用户界面。
第四步,实机拾取验证。将程序下载到机械臂,按现场实际调整IP配置和机器人程序,完成整筐工件的拾取与码垛。
第五步,速度冲刺。总完成时长和识别耗时的排名直接决定最终名次,方案调试阶段须持续优化算法参数与环节搭配,以压缩时间。
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
评论请先登录 登录
全部评论 0


相关阅读
 【技术分享】VM运行界面之清空图像2026-06-10
【技术分享】VM运行界面之清空图像2026-06-10 PoeLink-AI实施小助手2026-06-18
PoeLink-AI实施小助手2026-06-18 使用VM算法识别屏幕2026-06-05
使用VM算法识别屏幕2026-06-05 认证刷题与模拟考试系统2026-06-12
认证刷题与模拟考试系统2026-06-12 全国总决赛获奖名单公布!第四届“启智杯”机器智能大赛大奖花落谁家?2026-05-29
全国总决赛获奖名单公布!第四届“启智杯”机器智能大赛大奖花落谁家?2026-05-29
 浙公网安备 33010802013223号
浙公网安备 33010802013223号