- 0
- 0
- 分享
- 2022-01-05 16:00
案例背景:
针对智能手机、iPad平板、笔记本电脑等视觉锁螺丝替代人工锁螺丝;针对智能音箱、家具照明灯具、智能扫地机器人、智能电饭煲等视觉锁螺丝代替人工锁螺丝。
适用行业:
智能终端、智能家居、智慧照明、新能源锁螺丝行业。
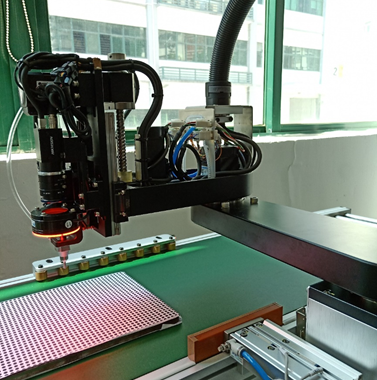
图1 相机装在Scara第二轴机器人锁螺丝场景
以下为所需视觉配单表:
| 物料 | 型号 | 描述 |
|---|---|---|
| 相机 | MV-CA020-10GM | 200万像素网口面阵相机,黑白 |
| 镜头 | MVL-MF2528M-8MP | 25mm,F2.8,2/3",800万分辨率,C接口镜头 |
| 视觉控制器/工控机 | RA400驱控一体化 | 恒科通驱控一体控制器,最多控制4轴,IO输入输出各24路,外部输入输出支持RS-485和以太网通信,通信协议支持Modbus RTU、Modbus TCP和TCP/IP协议 |
| 光源 | MV-LRDS-90-30-W | 白色环形光源,外径Φ90mm,内径Φ21mm,LED型,灯珠安装角度30° |
表1 视觉配单表
如下为机器人末端执行机构以及相机移动时的位姿变化示意图:
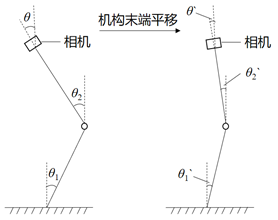
图2 机器人位姿变化示意图
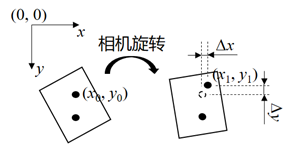
图3 相机位姿变化示意图
以下为方案搭建与调试步骤:
1. 标定:使用黑色圆点标定板或标定片,放在锁螺丝平台上,相机拍照获取9个圆点圆心像素坐标,如图4所示。同时,依次将机器人末端电批示教对准标定板或标定片上的9个圆点Mark点,获得机器人9个示教物理坐标,基于9组图像坐标与机器人物理坐标生成标定文件;
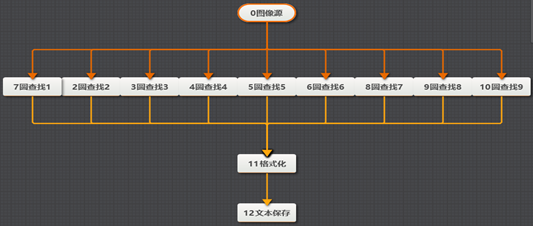
图4 标定方案
2. 将上述标定文件加载到标定转换模块中,如图5所示,转换获得实时来料Mark点的物理坐标;

图5 标定转换
3. 增加分支防呆,避免特征匹配或螺丝孔Mark点圆查找找偏,引起锁螺丝偏位,确保视觉锁螺丝操作不影响来料产品质量,如图6所示;
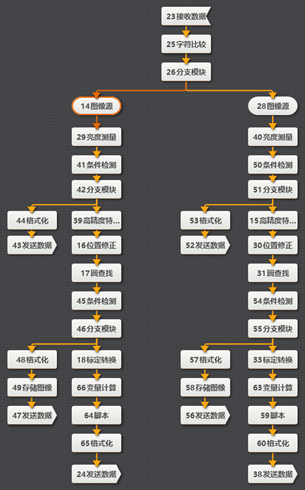
图6 生产方案
4. 生产锁螺丝过程为,视觉拍照两个螺丝孔,视觉转换获取该两个孔的机器人物理坐标,建立工件CAD坐标系,求得智能扫地机器人周围所有螺丝孔锁螺丝物理坐标,如图7所示。

图7 现场智能扫地机器人锁螺丝生产场景
解决客户痛点和问题:
1. 人工成本高,锁螺丝数量较多,人工锁螺丝容易疲劳;
2. 人工锁螺丝速度慢,效率低,不能满足批量生产产线要求;
3. 为了节约成本,提供设备竞争力,相机装在Scara第二轴视觉锁螺丝,需要定制标定算法,与常规四轴或模组锁螺丝不同。
技术指标:
1. 可用于智能手机、iPad平板、智能家居等锁螺丝产品;
2. 螺丝最小直径为1.2mm,定位精度0.02mm;
3. 最快约1.3s锁一颗螺丝;
4. 可用于视觉识别双Mark点,对手机、笔记本电脑等四周全部螺丝进行锁附。
方案优势:
1. 采用三轴机器人锁螺丝代替传统四轴和模组,节约设备成本;
2. 可用于螺丝数量较多,人工锁螺丝耗时、成本高等场景进行机器人视觉锁螺丝替代;
3. 锁螺丝成功率达99.8%,智能扫地机器人产线锁螺丝由10人现在减少到1人。


 现场运维异常处理手册2025-04-02
现场运维异常处理手册2025-04-02 海康移动机器人实施运维工程师认证资料目录2025-04-15
海康移动机器人实施运维工程师认证资料目录2025-04-15 【VM实现Halcon例程】光度立体法缺陷检测2025-04-17
【VM实现Halcon例程】光度立体法缺陷检测2025-04-17- 关节机器人防护分类分享2025-04-15
 浙公网安备 33010802013223号
浙公网安备 33010802013223号