- 0
- 0
- 分享
- 2022-03-22 10:53
一、什么是深度图
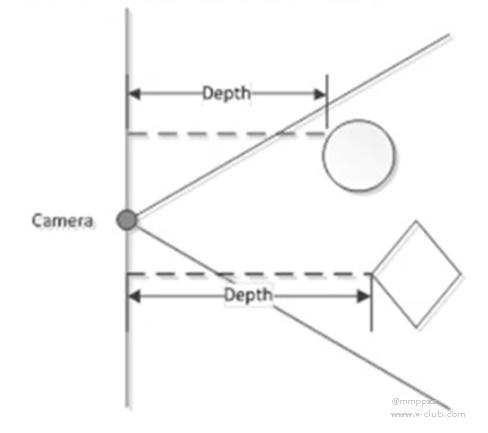
深度图像(depth image)也被称为距离影像(range image),是指将从图像采集器到场景中各点的距离(深度)作为像素值的图像,它直接反映了景物可见表面的几何形状。深度图像经过坐标转换可以计算为点云数据,有规则及必要信息的点云数据也可以反算为深度图像数据。
深度数据流所提供的图像帧中,每一个像素点代表的是在深度感应器的视野中,该特定的(x, y)坐标处物体到离摄像头平面最近的物体到该平面的距离(以毫米为单位)。
二、深度信息表达
因为记录距离信息的方式的差异性,所以在英文文献中对深度图像的表达呈现出很强的多样性。使用较多的表达式:range image。其中depth map、dense-depth map、depth image、range picture、3D image、surface height map都是等价的,除此之外的常用表达:dense-range image、depth aspect image、 2.5D image、 3Ddata、xyz maps、surface profiles等。
三、深度图的获取
深度图可以通过多种传感器获取,常见的有激光雷达测距、立体视觉成像、坐标测量机、莫尔条纹、结构光法等,分为被动测距和主动传感。如具备相机的内标定参数,深度图和点云图可以互相转换,主要的区别在于临近的检索方式不同。
被动测距传感中最常用的方法是双目立体视觉,该方法通过两个相隔一定距离的摄像机同时获取同一场景的两幅图像,通过立体匹配算法找到两幅图像中对应的像素点,随后根据三角原理计算出视差信息,而视差信息通过转换可用于表征场景中物体的深度信息。基于立体匹配算法,还可通过拍摄同一场景下不同角度的一组图像来获得该场景的深度图像。除此之外,场景深度信息还可以通过对图像的光度特征、明暗特征等特征进行分析间接估算得到。
主动测距传感相比较于被动测距传感最明显的特征是:设备本身需要发射能量来完成深度信息的采集。这也就保证了深度图像的获取独立于彩色图像的获取。近年来,主动深度传感在市面上的应用愈加丰富。RGBD相机主动深度传感的方法主要包括了TOF(Time of Flight)、结构光等。
TOF相机获取深度图像的原理是:通过对目标场景发射连续的近红外脉冲,然后用传感器接收由物体反射回的光脉冲。通过比较发射光脉冲与经过物体反射的光脉冲的相位差,可以推算得到光脉冲之间的传输延迟进而得到物体相对于发射器的距离,最终得到一幅深度图像。 结构光是具有特定模式的光,其具有例如点、线、面等模式图案。基于结构光的深度图像获取原理是:将结构光投射至场景,并由图像传感器捕获相应的带有结构光的图案。由于结构光的模式图案会因为物体的形状发生变形,因此通过模式图像在捕捉得到的图像中的位置以及形变程度利用三角原理计算即可得到场景中各点。



 PoeLink-AI实施小助手2026-06-18
PoeLink-AI实施小助手2026-06-18 【技术分享】VM运行界面之清空图像2026-06-10
【技术分享】VM运行界面之清空图像2026-06-10 拒绝踩坑!海康读码器串口通讯全链路实战:从硬件接线到触发指令配置2026-06-16
拒绝踩坑!海康读码器串口通讯全链路实战:从硬件接线到触发指令配置2026-06-16 使用VM算法识别屏幕2026-06-05
使用VM算法识别屏幕2026-06-05- 认证刷题与模拟考试系统2026-06-12
 浙公网安备 33010802013223号
浙公网安备 33010802013223号