- 0
- 3
- 分享
- 2022-03-23 09:55
一、什么是激光振镜双目相机
激光振镜双目相机由多线激光、振镜、双目相机共同组成的面阵三维测量系统,下文简称为振镜相机。左右目根据三角化原理重构三维点,DoE投射多线结构光用于重构,跟我们常见的双目相机不同的是,有一个振镜机构,负责移动结构光覆盖整个工作视野。单个位置进行投影,每条激光线所在的位置都可以被重构出来,这样只能重构局部的少数位置,振镜的扫描可以将视野内激光线经过的位置都重构出来,得到完整的重构点云。
二、振镜结构
激光振镜的结构如下图所示,相比其他的RGB,如散斑双目和DLP,整体的差异在于散斑投射器和DLP投影仪替换为多线激光振镜。激光器发射多线激光,振镜往复旋转是的激光线束完成测量范围的扫描。同样需要进行双目相机和RGB相机的标定,同时也需要进行多线激光振镜的标定。

图 1 多线激光外观
三、激光振镜测量原理
对于多线激光双目系统,单次测量仅能重构多线激光投影区域的点云,因此需要结合振镜扫描,使多线激光的运动偏转,逐一位置测量,最终实现全幅点云/深度图的输出。激光振镜的重构流程如图 2所示,测量流程主要包括极线校正、激光中心线提取、双目激光线匹配、深度图计算填充。
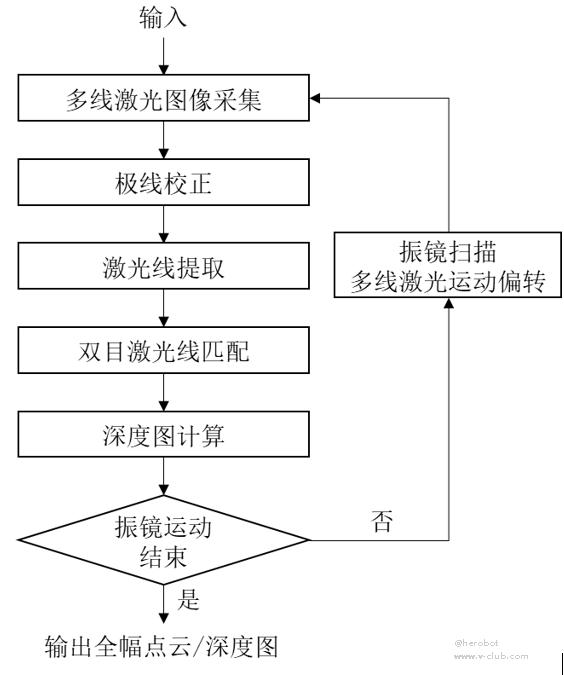
图 2 振镜相机系统测量流程
极线矫正的左右与双目散斑相机是一致的,便于在进行匹配时,只需要按行去进行匹配,可以简化匹配的流程,提高匹配效率。激光中心线提取是为获取中线点的亚像素坐标,每一个激光中心点都对应一个实际的物理点,所以中心点提取的精度决定了激光振镜的三维重构精度。如图 2所示为激光线打在被测物上的图像,中心点提取需要将所有的激光线的亚像素坐标计算出来。

图 3 多线激光成像
在完成中心线的亚像素坐标提取后,还需要将左右图的亚像素坐标进行匹配。激光线中心点没有别的编码特征,多条激光线提取出来的中心点难以进行区分,需要通过光平面的约束来进行中心点的匹配,每一个左图中心点对应右图一个中心点才能将三维点重构出来。完成中心点的匹配之后,通过三角测量原理将匹配点对重建为三维点坐标。如图 3所示为不同样品的重建结果
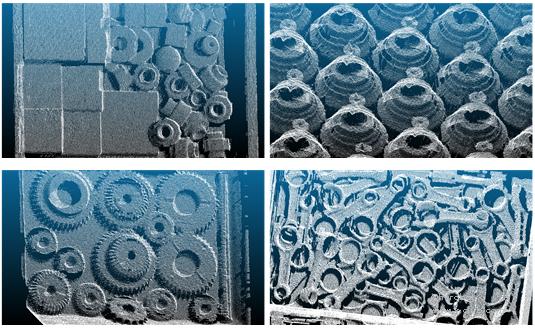
图 4 不同类型样品的重建效果
四、激光振镜相机优势
在多种类型的RGBD相机中,激光振镜与DLP在精度、帧率等各方面指标上更为接近,应用场景也类似,所以可以和DLP深度相机进行对比。
激光振镜首先精度比其他RGB传感器更高,在3m左右的测量位置仍然可以达到亚mm级别的测量精度。相比散斑双目,振镜的测量精度要高出一个数量级;相比DLP振镜因为激光线的提取精度高,可以达到0.1pix的像素精度,其重建精度也相比DLP要更高。
同样也是因为激光线的对比度显著高于DLP,在应对环境光干扰的条件下,激光振镜也能保持更好的测量效果。在环境光达到2500lux的条件下,激光线在环境中仍肉眼可见,在图像上也有足够的对比度用于提取中心点,而DLP的条纹肉眼能见度和图像上的对比度则要低的多。这也就造成没有条纹信息的位置深度缺失,而振镜则能实现更为完整的重建。
除去性能因素,在相机成本上,激光振镜要比DLP更低。同时高性能DLP的主要供应商为美国公司,而激光振镜的有不少国内厂商,激光振镜供应链更稳定可靠。
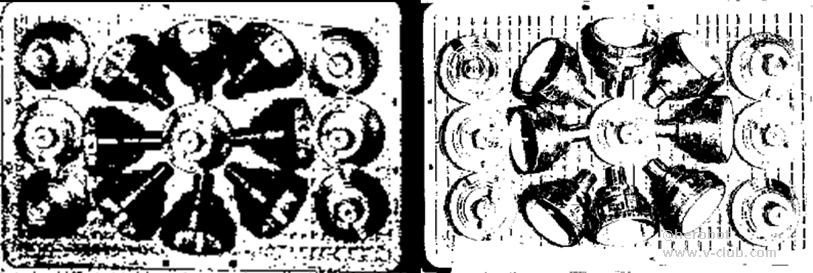
DLP多曝光效果 振镜多曝光效果
图5 2500lux光照干扰重建效果



- 1

 话术-用AI协助编写VM3D脚本模块的代码2026-06-29
话术-用AI协助编写VM3D脚本模块的代码2026-06-29 基于基础应用扩展的偏心抓取算法2026-07-07
基于基础应用扩展的偏心抓取算法2026-07-07 更换主控具体需要准备哪些工具和文件?2026-07-23
更换主控具体需要准备哪些工具和文件?2026-07-23- 移动机器人技术分享-26年7月2026-07-17
 浙公网安备 33010802013223号
浙公网安备 33010802013223号