1 使用 YOLOv5 进行自定义目标检测训练
深度学习领域在 2012 年开始起飞。大约在那个时候,它是一个有点排他性的领域。我们看到编写深度学习程序和软件的人要么是深度学习从业者,要么是在该领域拥有丰富经验的研究人员,要么是具有非常好的编码技能的人。
今天,仅仅过了10年左右,情况就发生了翻天覆地的变化,而且变得更好了。从字面上看,一个只学习了几周深度学习的学生可以在 20 行代码内训练一个神经网络模型。不仅仅是针对基准数据集的现成培训。
YOLOv5 是什么?
YOLOv5 是一种流行的实时目标检测器。它是 YOLO(You Only Look Once)单次检测器的 PyTorch 实现,它以其极快的速度和合理的准确性而闻名。
官方称,作为 Darknet
框架的一部分,YOLO 有四个版本。从 YOLOv1 到 YOLOv4。Darknet 框架是用 C 和 CUDA 编写的。
YOLOv5 中可用的模型总共包含5个模型。从 YOLOv5 nano(最小最快)到 YOLOv5 extra-large(最大型号)
YOLOv5n:它是新推出的 nano 模型,是家族中最小的模型,适用于边缘、物联网设备,并且还支持
OpenCV DNN。INT8
格式小于
2.5 MB,FP32
格式约为
4 MB。它是移动解决方案的理想选择。
YOLOv5s:它是家族中的小型模型,具有大约 720 万个参数,非常适合在 CPU 上运行推理。
YOLOv5m:这是具有 2120 万个参数的中型模型。它可能是最适合大量数据集和训练的模型,因为它在速度和准确性之间提供了良好的平衡。
YOLOv5l :是 YOLOv5 家族的大型模型,有 4650 万个参数。它非常适合我们需要检测较小对象的数据集。
YOLOv5x:它是五个模型中最大的,并且在五个模型中具有最高的mAP。虽然它比其他的慢并且有 8670 万个参数。
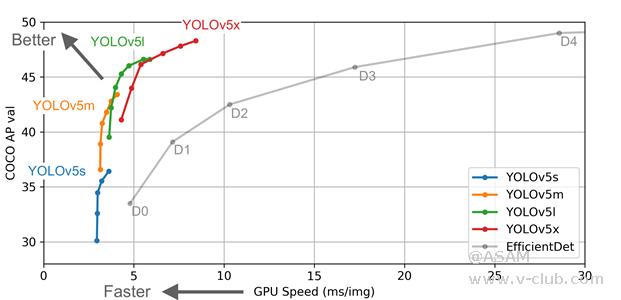
图1 Yolov5作者的算法性能测试图
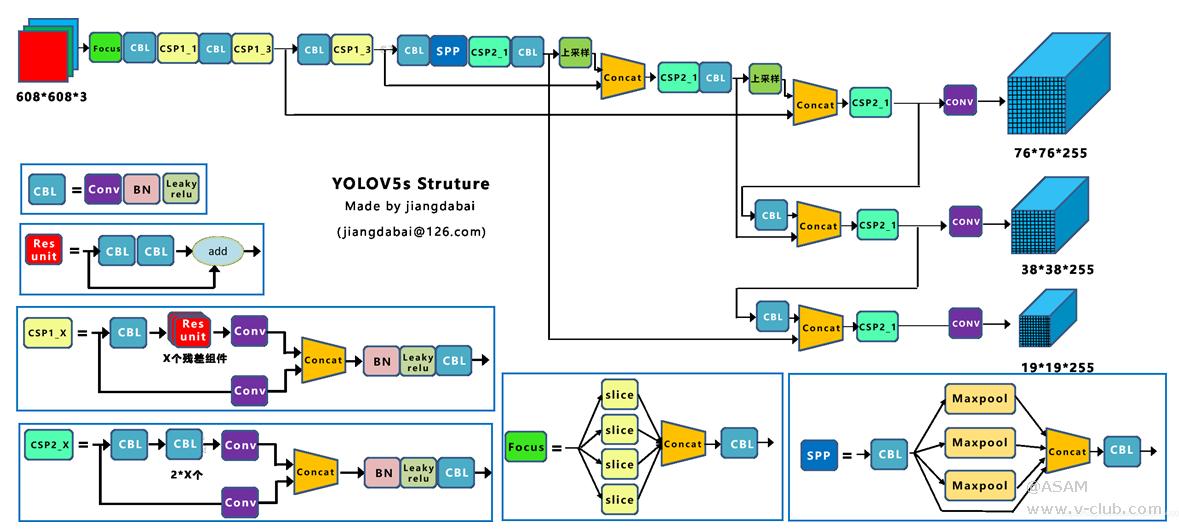
图2 Yolov5s整体的网络结构图
但训练和推理并不是全部。它包含许多其他功能,使其非常特别。让我们回顾一下
多种型号可供选择
已经在上面讨论过,可以根据用例和数据集从
5 种不同的模型中进行选择。无论是为边缘训练实时检测器,还是在云
GPU 上部署最先进的对象检测模型,它都具备人们可能需要的一切。
多种导出选项是一项主要要求。在部署之前,主要需要将训练好的模型转换(导出)为正确的格式。
可以将原生PyTorch
(.pt)模型转换为如下格式:
TorchScript,ONNX,OpenVINO,TensorRT,CoreML,TensorFlow
SavedModel, GraphDef, Lite, Edge TPU, and TensorFlow.
而我在OpenCV DNN使用的是ONNX格式。
YOLOv5的信息来自 GitHub 自述文件、问题、发布说明和 .yaml 配置文件。但是,它处于非常活跃的开发状态,我们可以期待随着时间的推移进一步改进。下表总结了
v3、v4
和
v5 的架构。
|
Layers
|
YOLOv3
|
YOLOv4
|
YOLOv5
|
|
Neural Network Type
|
FCNN
|
FCNN
|
FCNN
|
|
Backbone
|
Darknet53
|
CSPDarknet53
(CSPNet in Darknet)
|
CSPDarkent53
Focus
structure
|
|
Neck
|
FPN
(Feature Pyramid Network)
|
SPP
(Spatial Pyramid
Pooling)
and PANet
(Path Aggregation
Network)
|
PANet
|
|
Head
|
B*(5+C) output layer B:
No. of bounding boxes
C: Class score
、
|
Same as Yolo v3
|
Same as Yolo v3
|
|
Loss Function
|
Binary Cross Entropy
|
Binary Cross Entropy
|
Binary Cross Entropy
and Logit Loss Function
|
|
|
|
|
|
表1 v3、v4 和 v5 的架构
Backbone:
模型主干主要提取图像的基本特征。
Head: 包含具有最终检测的输出层。
Neck:
Neck连接Backbone和Head。它主要创建特征金字塔。Neck的作用是收集不同阶段的特征
1.2使用
YOLOv5 进行目标检测训练
首先收集数据集,可以是网上下载数据集或是自己制作。
若是自己制作则:
a. 从GitHub下载YOLOv5的源码和预训练模型(YOLOv5n, YOLOv5s, YOLOv5m, YOLOv5l, YOLOv5x)
b.
安装labelimg对照片进行标注,记得更改为yolo v5的格式。最后生成的是.xml格式记录照片标注的文件。将生成的可训练的数据集复制到和 YOLOv5 工程同一根目录下其中,YOLOv5 文件夹是工程代码,datasets 文件夹是数据集。数据集的文件目录是:其中,images 文件夹中存储的图片,labels 文件夹中存储的标签
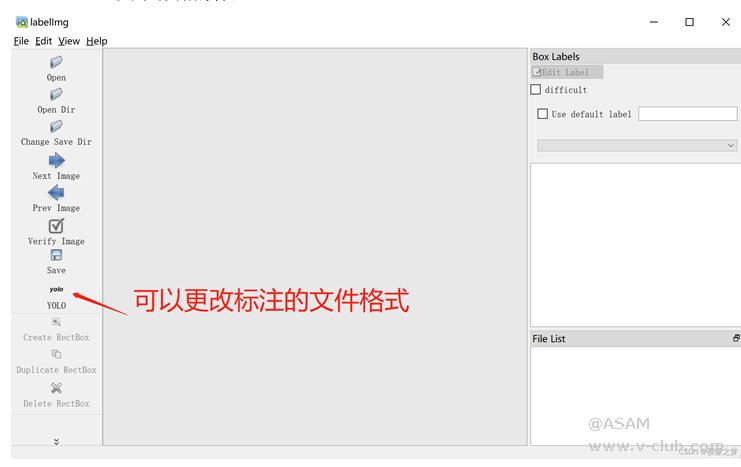
图3 labelimg示例
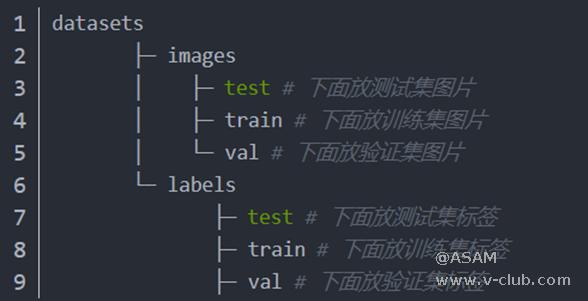
图4 训练集图片与标签存放位置
c.
配置数据集文件。在 YOLOv5/data文件夹修改配置数据集文件data.yaml
文件内容如下。Train和val是图像的目录。标签目录不需要写入,但会自动识别。nc表示识别的对象类型的数量,名称表示类型的名称。如果识别出多种类型的对象,则可以自行添加它们。示例如下:
# train and val data as 1)
directory: path/images/, 2) file: path/images.txt, or 3) list: [path1/images/,
path2/images/]
train: ../ datasets /images/
val: ../ datasets /images/
# number of classes
nc: 1
# class names
names: [thing']
d.
配置模型文件。在 YOLOv5/models 文件夹中添加一个 train.yaml
e.
运行 train.py 文件生成.pt文件,再运行export.py文件将.pt文件转换成.onnx文件。
train.py 文件和export.py文件在YOLOv5的源码中有。
2 MV-EB435i立体相机及其应用方法
2.1MV-EB435i立体相机介绍
本实例使用的是MV-EB435i立体相机,MV-EB435i立体相机包含彩色摄像头和深度摄像头,具体参数见表5。
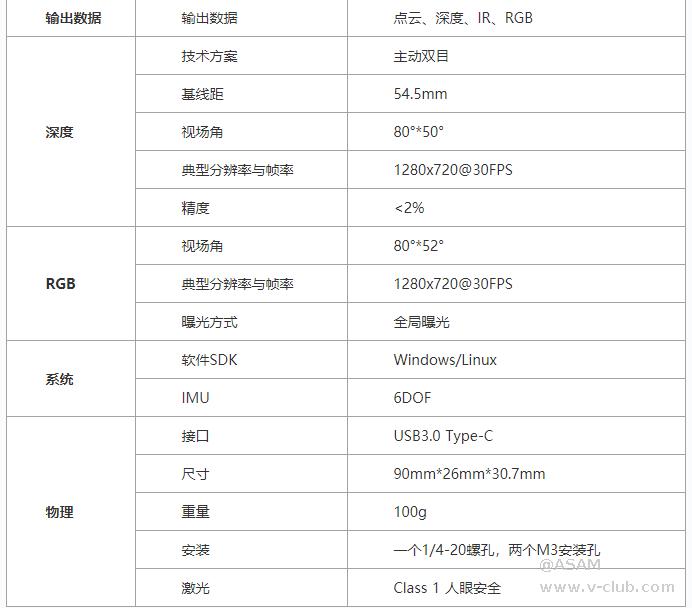
图5 MV-EB435i立体相机主要参数图
2.2 MV-EB435i立体相机的使用
电脑下载安装MV-EB435i立体相机的sdk,获取相关示例代码。本文主要使用sdk中的相关函数获取相机的图像信息和深度信息。
3 代码实现.
3.1导入库与定义全局参数
// 常数
const float INPUT_WIDTH = 640.0f;
const float INPUT_HEIGHT = 640.0f;
const float SCORE_THRESHOLD = 0.5f;
const float NMS_THRESHOLD = 0.45f;
const float CONFIDENCE_THRESHOLD = 0.45f;
// 文本参数
cv::Mat depth_all;
const float FONT_SCALE = 0.7f;
const int FONT_FACE = FONT_HERSHEY_SIMPLEX;
const int THICKNESS = 1;
int X;
int Y;
常量INPUT_WIDTH和INPUT_HEIGHT用于
blob 大小。BLOB代表二进制大对象。它包含可读原始格式的数据。必须将图像转换为
blob,以便网络可以处理它。在我们的例子中,它是一个形状为 (1, 3, 640,
640) 的 4D 数组对象。
SCORE_THRESHOLD:过滤低概率类分数。
NMS_THRESHOLD:删除重叠的边界框。
CONFIDENCE_THRESHOLD:过滤低概率检测。
函数draw_label注释锚定在边界框左上角的类名。代码相当简单。我们将文本字符串作为标签传递给 OpenCV 函数getTextSize()的参数。它返回文本字符串将占用的边界框的大小。这些尺寸值用于绘制一个黑色背景矩形,其标签由putText()函数呈现。
oid draw_label(Mat& input_image, string label, int left, int top) //绘制标签
{
// Display the label at the top of the bounding box.
int baseLine;
Size label_size = getTextSize(label, FONT_FACE, FONT_SCALE, THICKNESS, &baseLine);
top = max(top, label_size.height);
// 左上角
Point tlc = Point(left, top);
// 右下角。
Point brc = Point(left + label_size.width, top + label_size.height + baseLine);
// 绘制黑色矩形
rectangle(input_image, tlc, brc, BLACK, FILLED);
// 将标签放在黑色矩形上。
putText(input_image, label, Point(left, top + label_size.height), FONT_FACE, FONT_SCALE, YELLOW, THICKNESS);
}
函数预处理将图像和网络作为参数。首先,图像被转换为 blob。计算机视觉中的 Blob 是指图像中的连接区域。Blob分析是对前景/背景分离后的二值图像的连通区域进行提取和标记。每个标记的blob代表一个前景目标,然后可以计算该blob的一些相关特征。优点是通过Blob提取可以得到相关区域,但速度慢,分析困难。然后将其设置为网络的输入。该函数getUnconnectedOutLayerNames()提供输出层的名称。它具有所有层的特征,图像通过这些层向前传播以获取检测。处理后返回检测结果。
vector<Mat> pre_process(Mat& input_image, Net& net) //预处理
{
// 转换为 blob.
Mat blob;
blobFromImage(input_image, blob, 1. / 255., Size(INPUT_WIDTH, INPUT_HEIGHT), Scalar(), true, false);
net.setInput(blob);
// 前向传播
vector<Mat> outputs;
net.forward(outputs, net.getUnconnectedOutLayersNames());
return outputs;
}
在前面的函数pre_process中,我们将检测结果作为一个对象。需要将其拆开以进行进一步处理。在进一步讨论代码之前,让我们看看这个对象的形状和它包含的内容。
返回的对象是一个二维数组。输出取决于输入的大小。例如,默认输入大小为
640,我们得到一个大小为 25200×85(行和列)的二维数组。行表示检测的数量。所以每次网络运行时,它都会预测
25200 个边界框。每个边界框都有一个包含 85 个条目的一维数组,用于说明检测的质量。此信息足以过滤掉所需的检测。
网络根据 blob 的输入大小(即
640)生成输出坐标。因此,坐标应乘以调整大小因子以获得实际输出。展开检测涉及以下步骤。
a.循环检测。
b.过滤掉好的检测。
c.获取最佳组分数的索引。
d.丢弃类别分数低于阈值的检测。
Mat post_process(Mat& input_image, vector<Mat>& outputs, const vector<string>& class_name)
{
// 初始化向量以在展开检测时保存各自的输出。
vector<int> class_ids;
vector<float> confidences;
vector<Rect> boxes;
// 调整大小的因素
float x_factor = input_image.cols / INPUT_WIDTH;
float y_factor = input_image.rows / INPUT_HEIGHT;
float* data = (float*)outputs[0].data;
const int dimensions = 85;
const int rows = 25200;
// 迭代 25200 次检测。
for (int i = 0; i < rows; ++i)
{
float confidence = data[4];
// 丢弃错误检测并继续。
if (confidence >= CONFIDENCE_THRESHOLD)
{
float* classes_scores = data + 5;
// 创建一个 1x85 Mat 并存储 80 个分组。
Mat scores(1, class_name.size(), CV_32FC1, classes_scores);
//获取最佳类别分数的索引。
Point class_id;
double max_class_score;
minMaxLoc(scores, 0, &max_class_score, 0, &class_id);
// 如果分组分数高于阈值继续。
if (max_class_score > SCORE_THRESHOLD)
{
// 将类 ID 和置信度存储在预定义的相应向量中。
confidences.push_back(confidence);
class_ids.push_back(class_id.x);
// 中心
float cx = data[0];
float cy = data[1];
//框尺寸.
float w = data[2];
float h = data[3];
//边界框坐标。
int left = int((cx - 0.5 * w) * x_factor);
int top = int((cy - 0.5 * h) * y_factor);
int width = int(w * x_factor);
int height = int(h * y_factor);
// 将良好的检测存储在框向量中。
boxes.push_back(Rect(left, top, width, height));
}
}
//跳到下一列。
data += 85;
}
// 执行非最大抑制并绘制预测。
vector<int> indices;
NMSBoxes(boxes, confidences, SCORE_THRESHOLD, NMS_THRESHOLD, indices);
for (int i = 0; i < indices.size(); i++)
{
int idx = indices[i];
Rect box = boxes[idx];
int left = box.x;
int top = box.y;
int width = box.width;
int height = box.height;
// 绘制边界框。
rectangle(input_image, Point(left, top), Point(left + width, top + height), BLUE, 3 * THICKNESS);
//获取类名的标签及其置信度。
string label = format("%.2f", confidences[idx]);
label = class_name[class_ids[idx]] + ":" + label;
// 绘制类标签。
draw_label(input_image, label, left, top);
// int pixel_val = scaleMat.at<uchar>(top + height / 2, left + width / 2);
Y = top + height / 2;
X = left + width / 2;
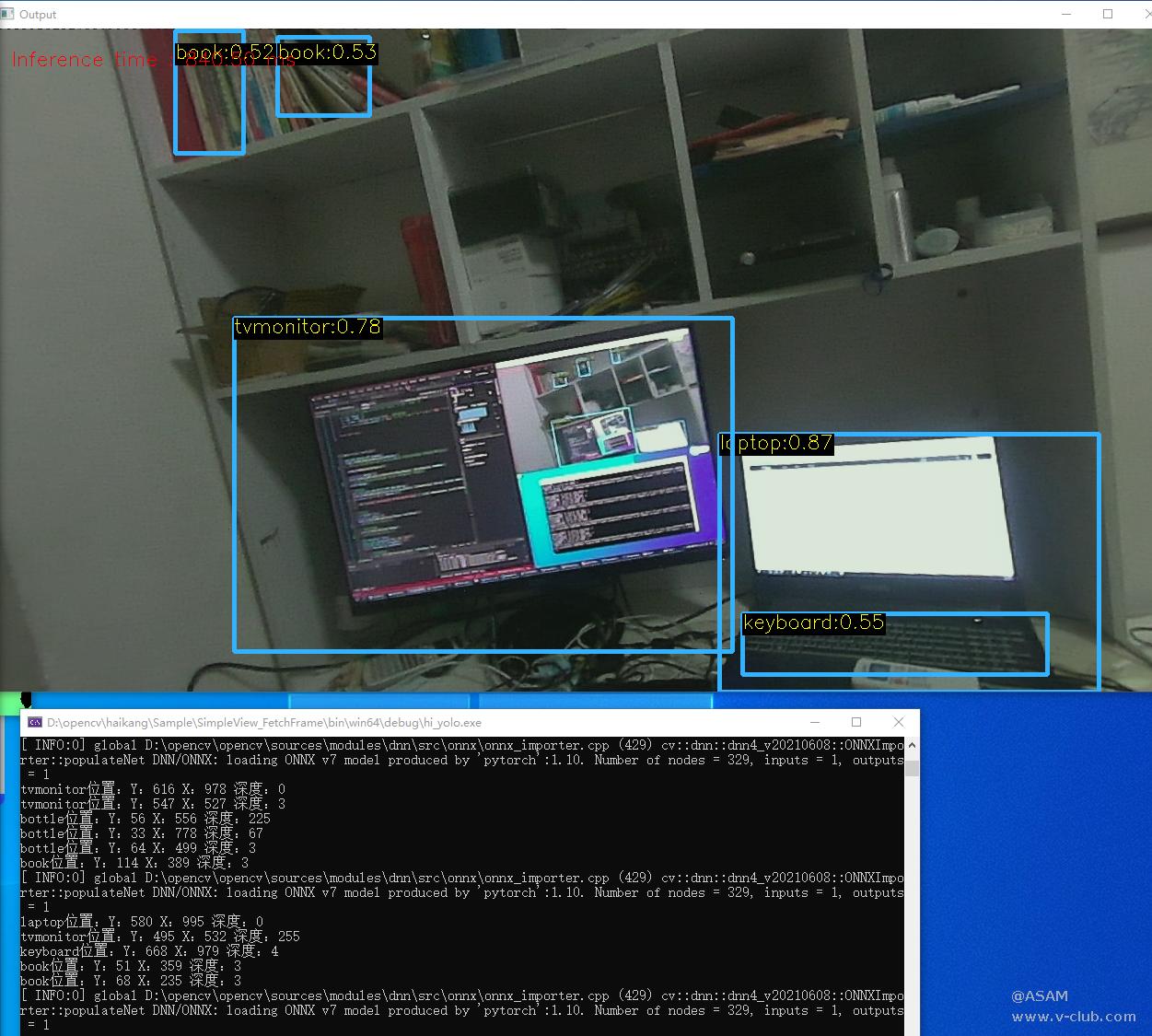
int ve_stat = depth_all.ptr<uchar>(Y)[X]; //获取深度信息
cout << class_name[class_ids[idx]] << "位置:" << "Y:" << Y << " X:" << X << " 深度:" << ve_stat <<endl;
}
return input_image;
}
通过执行非最大抑制来删除重叠框。该函数NMSBoxes()获取一个框列表,计算IOU (Intersection Over Union).
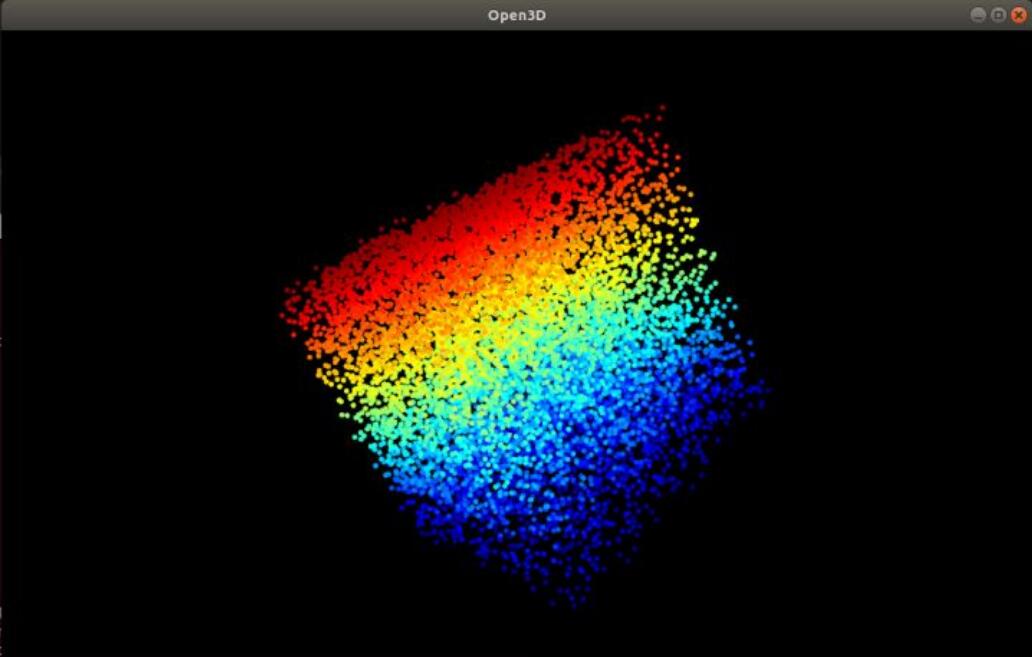
3.5获取图像信息与深度信息
从相机获取图像信息与深度信息并将信息转换成opencv方便处理的mat格式
MV3D_RGBD_VERSION_INFO stVersion;
ASSERT_OK(MV3D_RGBD_GetSDKVersion(&stVersion));
// LOGD("dll version: %d.%d.%d", stVersion.nMajor, stVersion.nMinor, stVersion.nRevision);
ASSERT_OK(MV3D_RGBD_Initialize());
unsigned int nDevNum = 0;
ASSERT_OK(MV3D_RGBD_GetDeviceNumber(DeviceType_Ethernet | DeviceType_USB, &nDevNum));
// LOGD("MV3D_RGBD_GetDeviceNumber success! nDevNum:%d.", nDevNum);
ASSERT(nDevNum);
// 查找设备
std::vector<MV3D_RGBD_DEVICE_INFO> devs(nDevNum);
ASSERT_OK(MV3D_RGBD_GetDeviceList(DeviceType_Ethernet | DeviceType_USB, &devs[0], nDevNum, &nDevNum));
for (unsigned int i = 0; i < nDevNum; i++)
{
LOG("Index[%d]. SerialNum[%s] IP[%s] name[%s].\r\n", i, devs[i].chSerialNumber, devs[i].SpecialInfo.stNetInfo.chCurrentIp, devs[i].chModelName);
}
//打开设备
void* handle = NULL;
unsigned int nIndex = 0;
ASSERT_OK(MV3D_RGBD_OpenDevice(&handle, &devs[nIndex]));
// LOGD("OpenDevice success.");
// 开始工作流程
ASSERT_OK(MV3D_RGBD_Start(handle));
// LOGD("Start work success.");
BOOL bExit_Main = FALSE;
RenderImgWnd depthViewer(1280, 720, "depth");
MV3D_RGBD_FRAME_DATA stFrameData = { 0 };
while (!bExit_Main && depthViewer)
{
// 获取图像数据
int nRet = MV3D_RGBD_FetchFrame(handle, &stFrameData, 5000);
if (MV3D_RGBD_OK == nRet)
{
// LOGD("MV3D_RGBD_FetchFrame success.");
RIFrameInfo depth = { 0 };
RIFrameInfo rgb = { 0 };
parseFrame(&stFrameData, &depth, &rgb);
// LOGD("rgb: nFrameNum(%d), nheight(%d), nwidth(%d)。", rgb.nFrameNum, rgb.nHeight, rgb.nWidth);
Mat depth_frame(depth.nHeight, depth.nWidth, CV_16UC1, depth.pData); //将深度图转化为Mat格式
// imshow("depth_frame", depth_frame);
Mat rgb_frame(rgb.nHeight, rgb.nWidth, CV_8UC3, rgb.pData); //将彩色图转化为Mat格式
depth_all = depth_frame;
depthViewer.RenderImage(depth);
Mat A;
cvtColor(rgb_frame, A, COLOR_BGR2RGB); //B、R通道交换,显示正常彩色图像
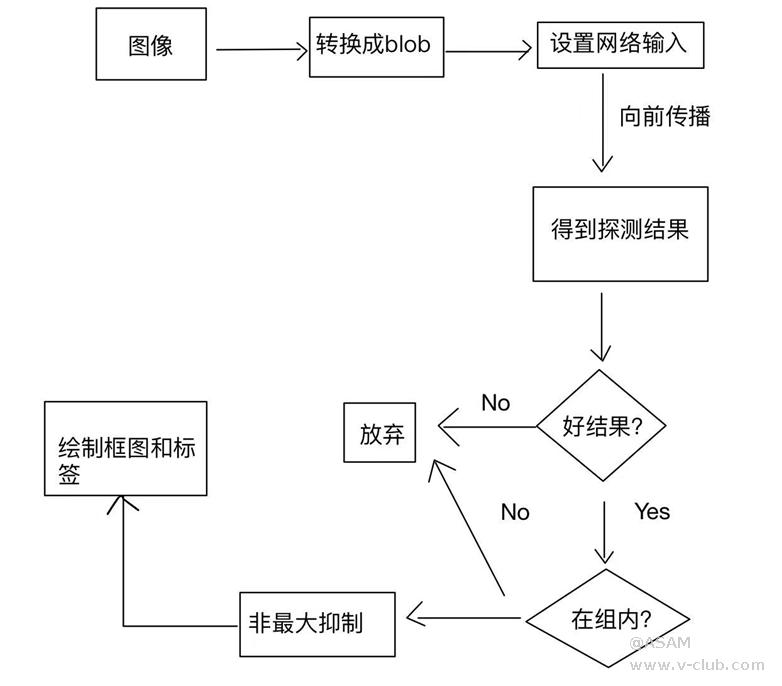
图6 主程序框架图
运行环境:操作系统: Windows10
OpenCV版本: OpenCV3.43
Visual Studio版本: VS2022
代码链接:https://github.com/Adaggvf/hi_yolo







 浙公网安备 33010802013223号
浙公网安备 33010802013223号