- 0
- 0
- 分享
- 2022-09-29 11:46
1. 永磁同步电机系统工作原理
由上图可知,永磁同步电机的驱动系统大致可分为电机本体部分、逆变器部分与控制器部分。永磁同步电机控制过程的大致工作原理如下:
转子位置传感器获得电机的位置信息,控制器通过DSP实时处理位置信息,计算出电机的相应电角度。驱动电路的控制信号是由电机相电流在经电流传感器采样后,通过所设计的电流控制环与速度控制环产生的。该信号在经驱动电路后生成六路PWM的控制信号,从而控制逆变器开关的通断,给电机施加相应的相电压,达到控制电机的转矩与转速的效果。
永磁同步电机本体部分由定子,转子与气隙三部分组成。为保证反电势波形的正弦性,定子绕组一般采用分布式正弦绕组。转子由电机转轴、轧制硅钢片和永磁体组成。硅钢片可以极大地减小涡流损耗。根据不同的电机设计要求,可以采用不同的永磁材料与转子结构,AGV行业的PMSM一般采用钕铁硼作为永磁材料,并采用表贴式转子结构,对本体进行合理设计后,绕组反电势为正弦波。
在合理设计永磁同步电机本体的基础上,由交流电机绕组理论知,向永磁同步电机三相定子绕组中通入三路幅值相等,相位相差120度的正弦电流时,输入的三相电流会在定转子之间的气隙产生一个旋转的定子磁场。该磁场的转速与同步转速相同,旋转中心为转子轴心,绕转子旋转。此旋转磁场起到一个驱动永磁体所产生磁场的作用,产生带动转子旋转的电磁转矩,以同步转速进行旋转。
2. 永磁同步电机数学模型
从物理量角度看,电机的基本数学模型就是电压,电流,磁链,转矩,转速等物理量相互联系,相互制约的关系,具体表现为一组微分方程式。理想永磁同步电机基本假定如下:
1) 永磁体具有线性磁路,不计涡流损耗,磁路不发生饱和。
2) 假定定转子表面均不开槽。
3) 相电流、相电压、反电势波形均为理想正弦波,无谐波分量
4) 定子绕组为三相绕组,每两相相差120电角度;转子沿d轴/q轴均对称。
在abc三相静止坐标系下,由于三相定子绕组自感、互感间的复杂作用关系,电机的参数较为复杂,且电机电感的参数随电机转动角度的不同而变化,不利于对电机的分析与计算。令d轴与转子永磁体轴线方向重合并以同步转速随转子转动,从而使得永磁体磁链始终位于d轴上,q轴超前d轴90度电角度得到dq坐标系。由abc静止坐标系到d-q旋转坐标系的恒功率坐标变换方程为:
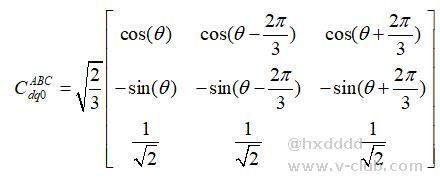
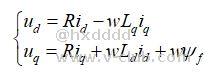
其中θ用来表示d轴与A相轴线之间的夹角。利用上式,PMSM在abc坐标下的电压方程变换到d-q旋转坐标系下的电压方程为:

式中:ud,uq——d-q旋转坐标系下的d、q轴电压分量;
id,iq——d-q旋转坐标系下的d、q轴电压分量;
Ld,Lq——d、q轴同步电感系数。
在稳态条件下,上式可以表示为:
d-q坐标系下的电磁转矩可表示为:

由转矩方程可知,当id=0,或者当Ld=Lq(SPMSM电机)时,电磁转矩只与q轴电流有关,使得永磁同步电机具有了直流电机式控制简单且稳定的特点。
由于PMSM永磁体磁链恒定,此时dq轴磁链可以表示为:
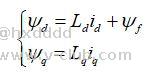
代入电压方程得到:

式中:ud,uq— d、q轴电压;
id,iq — d、q轴电流;
ωe — 电机转子电角速度;
RS— 定子绕组相电阻;
Ld,Lq — 直轴电感、交轴电感;
Ψf— 永磁体磁链。


 现场运维异常处理手册2025-04-02
现场运维异常处理手册2025-04-02 海康移动机器人实施运维工程师认证资料目录2025-04-15
海康移动机器人实施运维工程师认证资料目录2025-04-15 【VM实现Halcon例程】光度立体法缺陷检测2025-04-17
【VM实现Halcon例程】光度立体法缺陷检测2025-04-17- 关节机器人防护分类分享2025-04-15
 浙公网安备 33010802013223号
浙公网安备 33010802013223号