- 0
- 0
- 分享
- 2022-10-08 15:23
一、基本原理
下视VSLAM导航通过利用AGV上的下视相机实现定位导航过程,包含建图和定位两个过程:
1、 建图:AGV采集下视相机的图像,通过算法处理提取下视图像特征,构建与实际地面环境一致的视觉地图;
2、 定位:AGV根据构建的视觉地图和当前的下视图像,提取图像中特征,通过定位算法,实现当前图像特征与地图特征的匹配,计算AGV的位姿;
二、整体流程
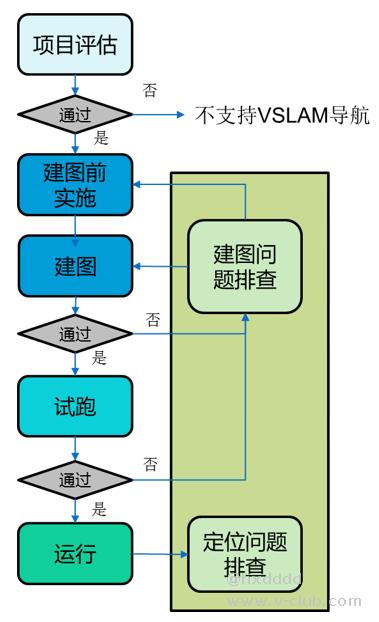
VSLAM导航实施整体流程
VSLAM的总体流程如上图所示,其中包含5个相关过程,各个子过程之间的关系如下:
(1)先进行项目评估:主要是评估该项目的实际环境和情形是否适合采用下视VSLAM导航,若适合则进行后续实施过程;
(2)建图前实施:包含拓扑图绘制、建图前二维码或十字的布置,该过程主要用于后续实现建图过程中AGV的自动采集数据的导航;
(3)建图:通过建图客户端和AGV,自动采集地面数据,并完成地图的构建,该过程中出现的问题主要从建图功能去排查;
(4)地图试跑:即使建图过程无报错,也要通过地图试跑功能来校验地图是否可用于导航定位;如果试跑不通过,需要排查地图存在的问题;
(5)定位运行:对于试跑通过的地图,可进一步用于定位运行;若定位运行过程中出现问题,需要排查定位存在的问题或者分析地图是否存在变化;
1、项目评估
该过程目的是为了评估该项目实际条件是否适合采用纹理导航,需要了解到并不是所有的项目都适合采用纹理导航。
纹理导航关键是靠识别地面特征为核心技术,因此需要地面特征丰富且稳定。项目评估阶段,不仅限于评估流程说明书中列举的风险,可以主动识别现场可能存在的引起地面变化的因素,例如地面返潮、地面磨损、地面污染等因素,如下图所示。
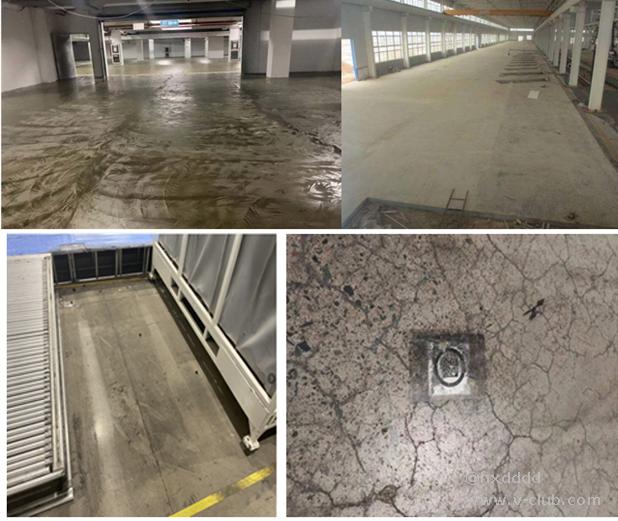
地面污染示例

地面返潮示意
2、建图前实施
该过程目的是为了在地面部署自动化采图过程中需要的色带或二维码。建图实施关键是要保证十字或二维码的实际距离于拓扑图一致(大部分建图过程中遇到的问题都由此引发)。色带采用标准规格的色带。根据地面背景颜色选择对比度较高的色带。如深色场地选用白色色带,浅色场地选用黑色色带。不宜选用黑白相间的色带。
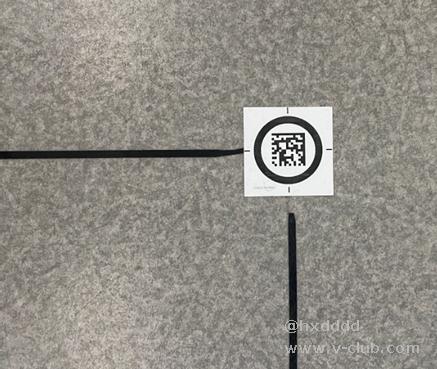
二维码及色带布置示意(连续纹理)
3、自动建图
AGV建图是通过建图客户端操作AGV自动建图的流程,建图完成后可自动生成场地的纹理地图。建图开始时需要确认建图的相机参数,相机参数在项目评估阶段已经确认,建图过程中需要采用相同的参数,否则用默认参数有可能导致地图不可用,需要重新建图。
建图过程中要求分区域建图,边建图边试跑,防止建图完后试跑不通过,需要重新建图,因此不建议一次性建完地图然后再试跑。建图的操作人员需要了解到最重要的一点建图完成不等同于地图有效,能用于导航定位。
4、试跑运行
试跑是通过AGV定位运行来校验地图是否有效的关键步骤,也是必不可少的工作(目前项目上实施过程中容易遗漏),只有试跑通过才能将地图用于后续的定位导航。
试跑后会用颜色标记试跑结果,蓝色表示试跑通过,红色表示试跑不通过。
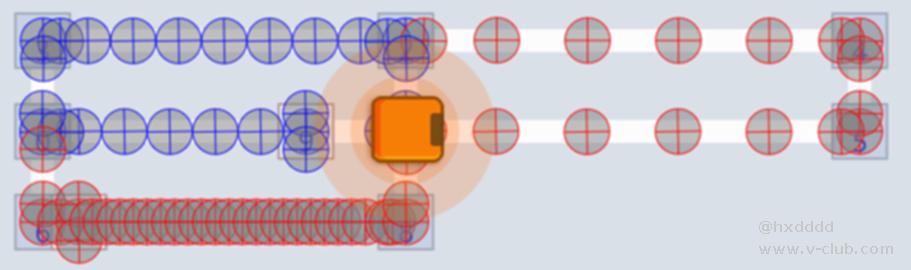
纹理试跑结果示意
对于试跑通过的地图,可以用于后续的导航定位,并对其进行上线点设置等编辑操作。


 现场运维异常处理手册2025-04-02
现场运维异常处理手册2025-04-02 海康移动机器人实施运维工程师认证资料目录2025-04-15
海康移动机器人实施运维工程师认证资料目录2025-04-15 【VM实现Halcon例程】光度立体法缺陷检测2025-04-17
【VM实现Halcon例程】光度立体法缺陷检测2025-04-17- 关节机器人防护分类分享2025-04-15
 浙公网安备 33010802013223号
浙公网安备 33010802013223号