3C行业|光学镜筒组装前段抓取案例
- 0
- 0
- 分享
- 2022-10-28 11:16
本案例为3C行业的光学镜筒组装前段的隔片上料工位,视觉通过对震料盘上的隔片进行拍照定位引导机械手进行抓取。
1、案例背景
(1)需求
对震料盘上的产品进行引导定位抓取、正反面检测、筛选产品安全区域,抓取效率要求高。
(2)痛点
- 需要检测正反面,产品正反面打光的效果差异不大,使用圆查找工具工具正反面产品外圆半径大小不一样判断
- 筛选产品重叠区域,防止多吸嘴抓取时碰到相邻较近产品,用Blob查找面积和个数进行判断,超过一定面积和个数就可以知道是不是有重叠区域或者产品间距过小
- 生产效率要求高,只能压缩视觉处理时间,四个相机实现并行处理缩短时间
- 视野边缘抓取不稳定,标定范围覆盖产品抓取范围来解决边缘抓取不稳

图1 产品实物图
2、方案描述
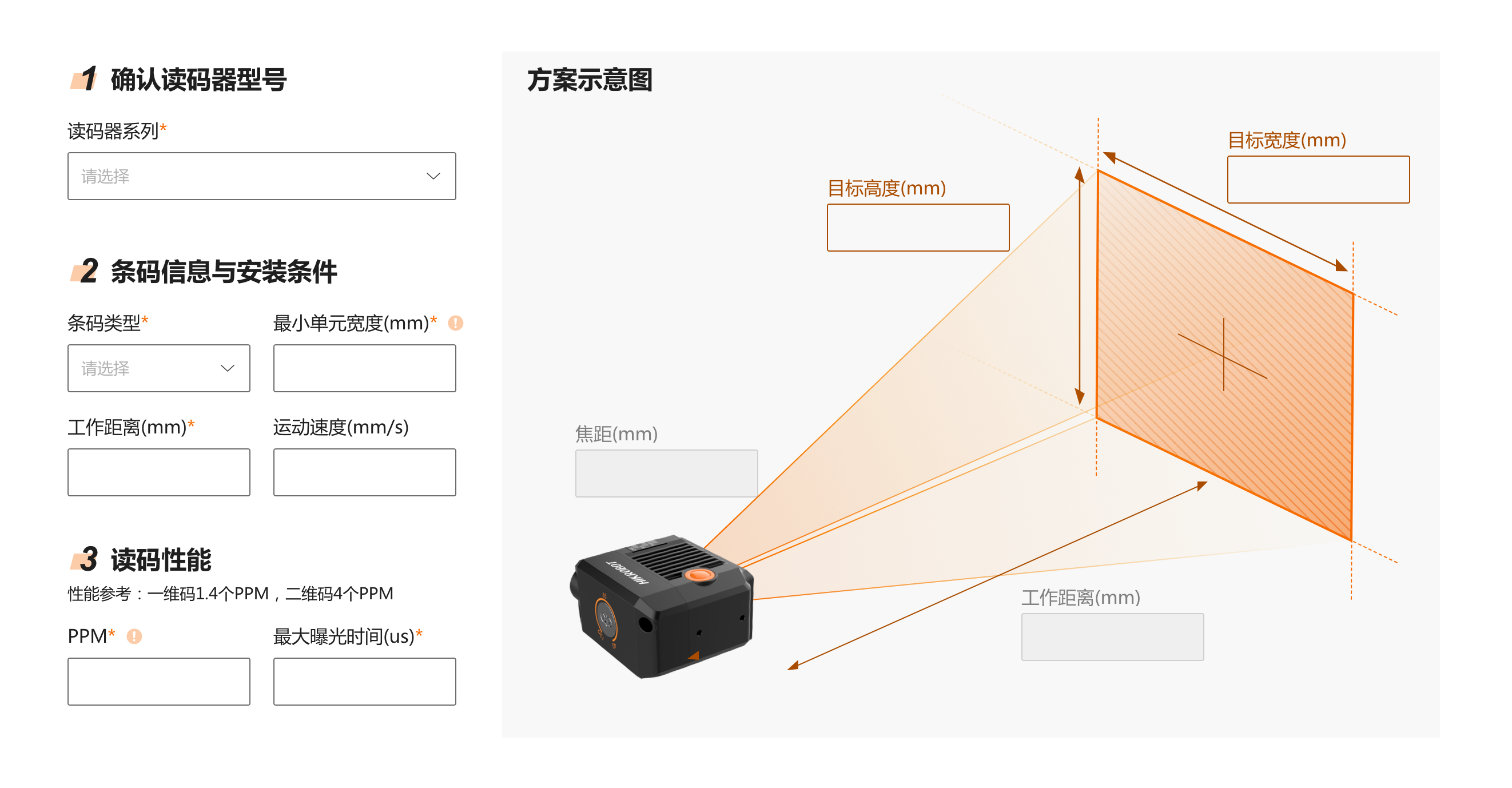
(1)配单表

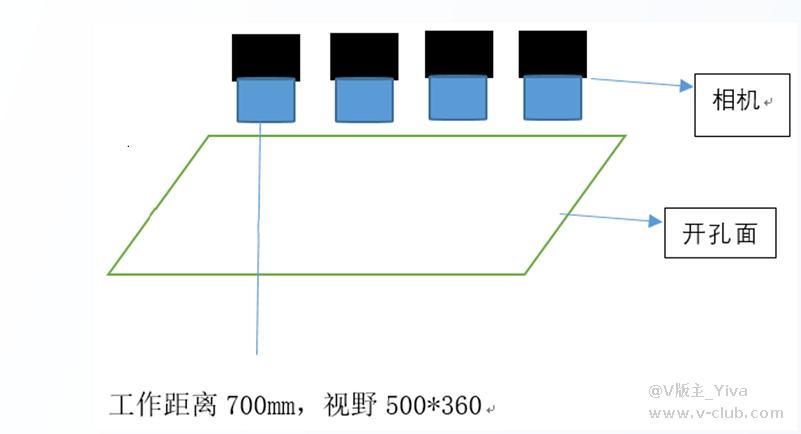
(2)方案示意图
(3)方案思路
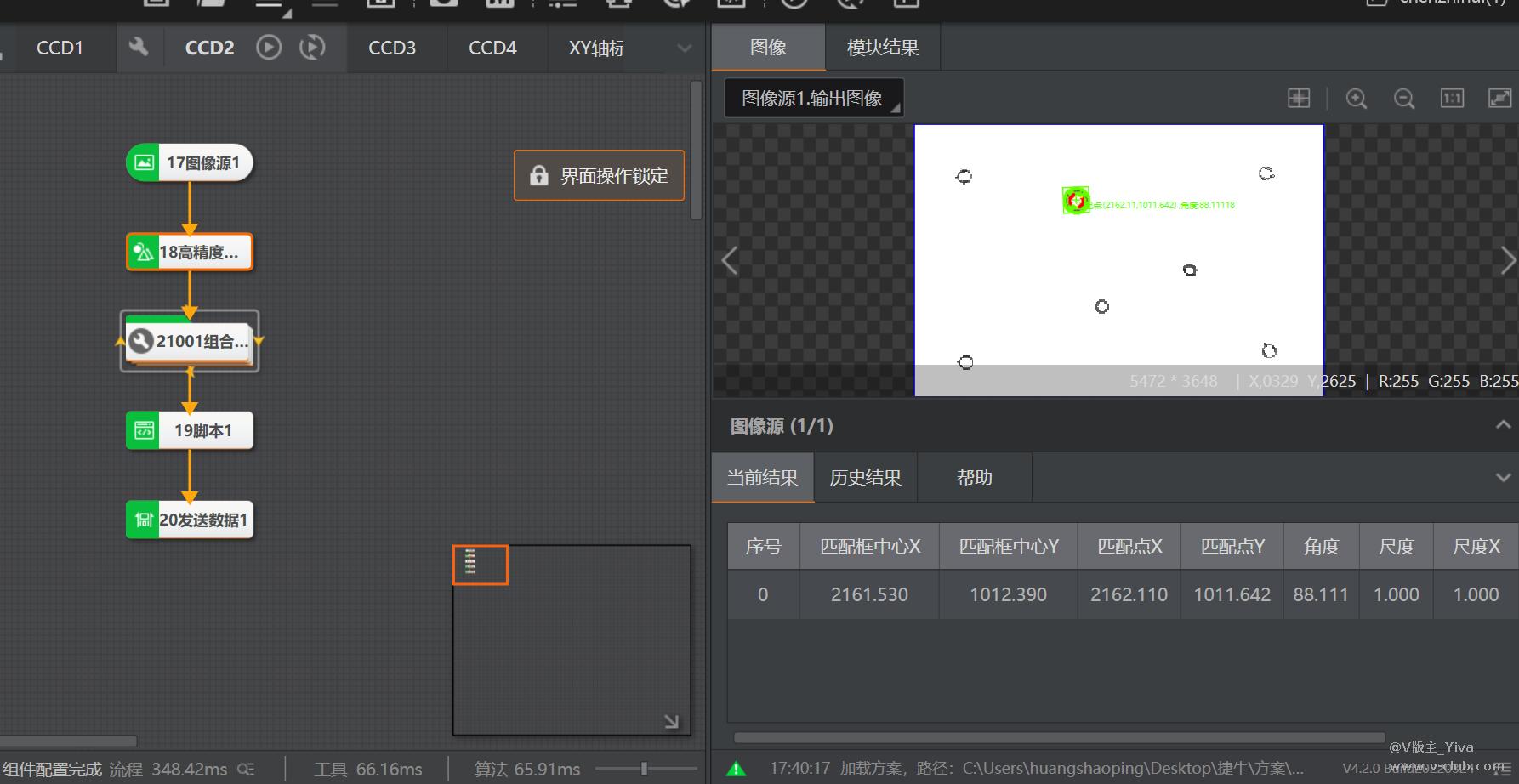
- 相机拍照震料盘的产品,使用高精度匹配模板工具匹配一次性匹配多个产品
- 匹配结果传入Group循环进行单个位置修正进行一个粗定位
- 筛选产品重叠区域:运用Blob查找面积和个数进行判断,超过一定面积和个数就可以知道是不是有重叠区域或产品间距过小,Blob分析模块继承高精度匹配的搜索区域进行防重和安全区域判断
- 产品正反面检测:运用圆查找来识别产品内圆半径进行产品再次定位圆心与查找出来的半径来判断正反;用亮度检测模块继续再次检测产品的正反面,从而解决因打光效果差异不大而检测难的问题
- 边缘抓取不稳定:主要是相机畸变导致,可以做畸变矫正或者标定轨迹覆盖抓取范围,如标定范围覆盖产品抓取范围
- 生产效率问题:采用4个相机实现并行处理缩短时间
(4)搭建与调试
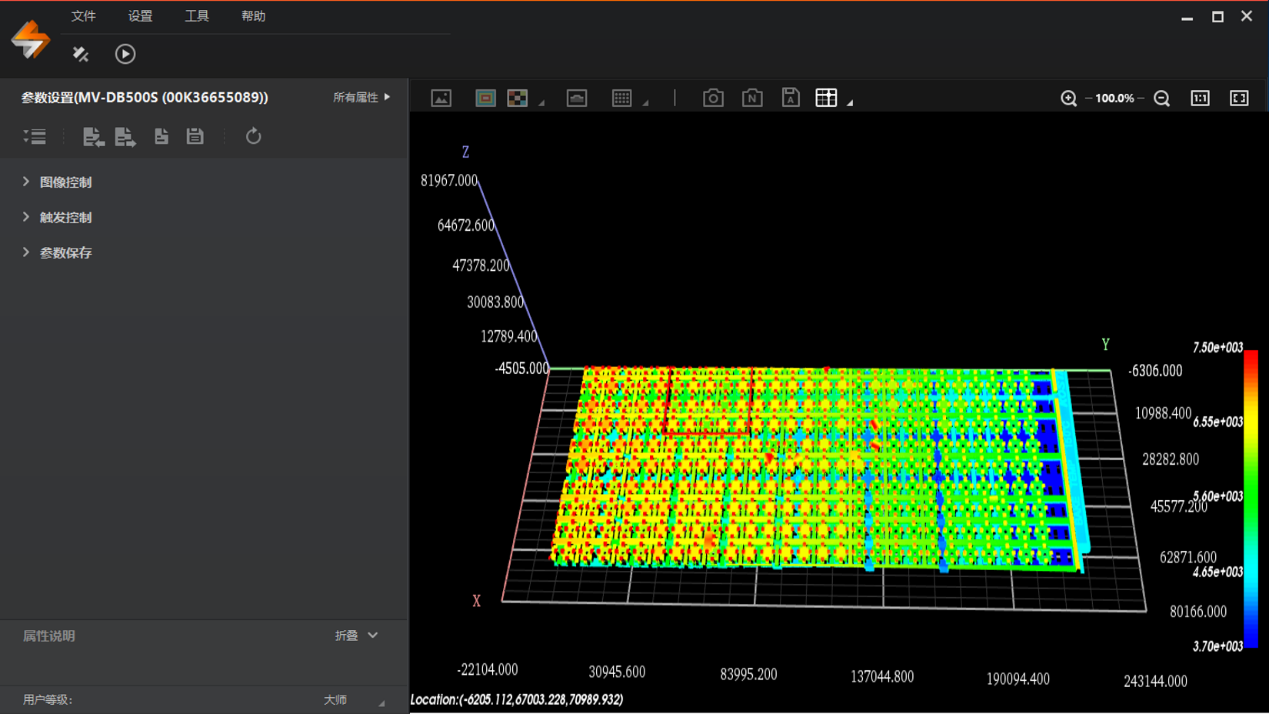
- 调试拍照效果,尽量把视野内的产品轮廓分明
- 进行与机械的9点标定,尽量覆盖抓取的范围抓取会比较稳定
- 按照方案思路进行搭建方案,先定位到设置的产品个数然后检测正反面产品,再筛选安全区域内的产品
- 把吸嘴产品放到示教位置转换到机械物理坐标系建立基准
- 每次找到的产品坐标与基准的进行做差计算得到最终的位移
3、方案优势
- 该方案使用的是2000万相机和VM算法开发平台为客户降低成本提高利润
- 本方案有效解决高精度抓取问题
- 本方案流程并行处理,提高生产效率30%,检测效率大幅度提升
- 产品合格率由98.7%提高到99.9%
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
上一篇
评论请先登录 登录
全部评论 0


相关阅读
 FTP服务器搭建,支持海康相机FTP输出图像2026-02-27
FTP服务器搭建,支持海康相机FTP输出图像2026-02-27 标定板在线生成器2026-02-11
标定板在线生成器2026-02-11 【具身智能系列】复合机器人+SC5000XM硬软件一体行业解决方案2026-02-10
【具身智能系列】复合机器人+SC5000XM硬软件一体行业解决方案2026-02-10 移动机器人工程师认证回顾-26年1月2026-02-10
移动机器人工程师认证回顾-26年1月2026-02-10- 读码器TCP通讯配置全解析:从客户端到服务器的实战指南2026-03-09
 浙公网安备 33010802013223号
浙公网安备 33010802013223号