
- VM常见定位场景与方案设计
- 光伏串返机纠偏实现
- 用VM实现halcon例子--胶水检测
- 提问区问题。巧用形态学,数米粒。
- 用VM实现halcon例子--太阳能面板检测断线瑕疵,halcon中的例子(提问区看到的)
- 太阳能面板检测断线瑕疵(补充vm流程附件)
- VM重现经典halcon液位检测案例
- Halcon例题,液位检测。用的是43版本。在此感谢坛友勇的热心分享
- 浅试颜色识别模块3
- 浅试颜色识别模块2
- 浅试颜色识别模块
- 浅谈对海康视觉软件做定位/对位项目的想法
- 浅谈对海康视觉软件做定位/对位项目的想法二
- 浅谈对海康视觉软件做定位/对位项目的想法三
- 浅谈对海康视觉软件做定位/对位项目的想法四-----MODBUS-TCP通讯
VM常见定位场景与方案设计
- 0
- 6
- 分享
- 2022-11-11 10:13
本文主要介绍如何使用VM4.2实现常规定位引导项目的方案设计。
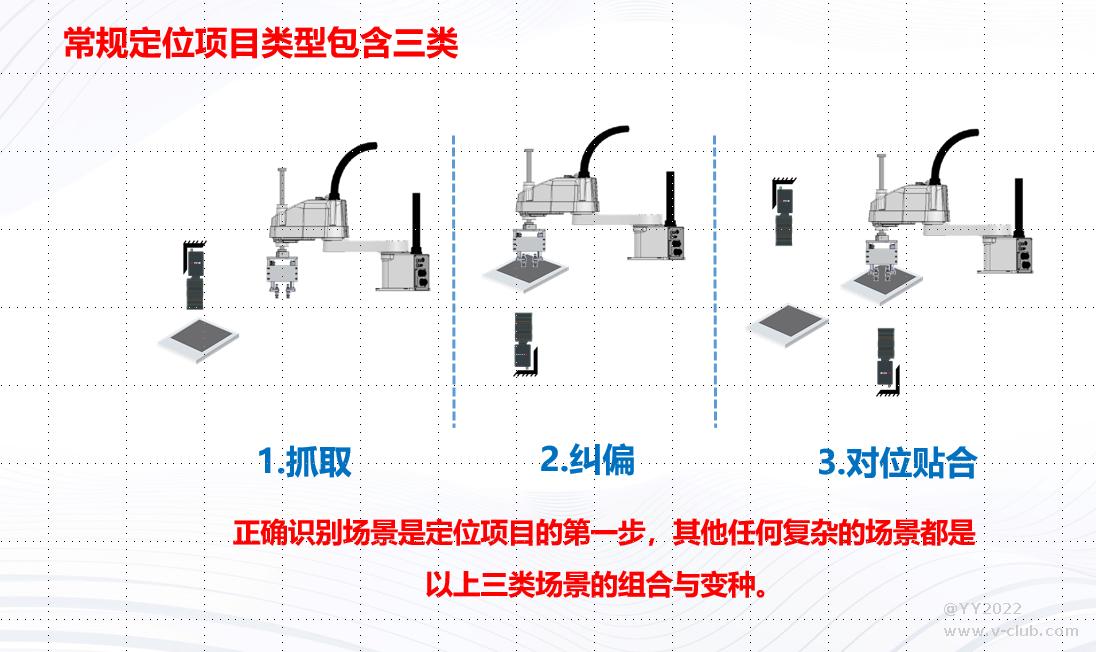
1、定位项目场景综述
2、定位场景需求与设计思路
2.1、定位场景需求分析成像质量要求:
调整相机焦距保证成像清晰(以图像边缘过渡带不超过两个像素为准)。
保证待检测物料特征处于图像正中心(图像边缘容易产生径向畸变)。
机构精度要求:
静态测试:相机在拍照位与物料保持静止,连续拍照,保证图像特征点提取稳定在一个像素以内,特征点提取不稳定则需选取更为稳定的特征点。
动态测试:
①平移精度:物料保持不动,机械手分别沿X/Y正负方向等步长移动4次得到三组像素差,保证像素差在一个像素以内。每次移动后回到原位,查看平移复位精度(即回原位查看物料图像特征点坐标,必须保证在在一个像素以内)。
②旋转精度:机械手分别沿正反方向旋转一定角度(与标定时的角度相当),查看图像特征角度是否等角度变化(一般需保证在0.1度以内),同时回原位查看复位精度(即回原位查看物料图像特征点坐标必须在一个像素以内)。
点位移动测试:使用VM通讯发送绝对坐标给机械手,确保机械手能移动到指定点位。
2.2、定位设计思路
定位项目,可分为标定,示教,偏差运算这三部分:
标定:统一坐标系。相机拍照得到的是像素坐标,而机械手移动的是物理坐标,所以需要通过标定来讲像素量转为物理量,让执行机构去执行。
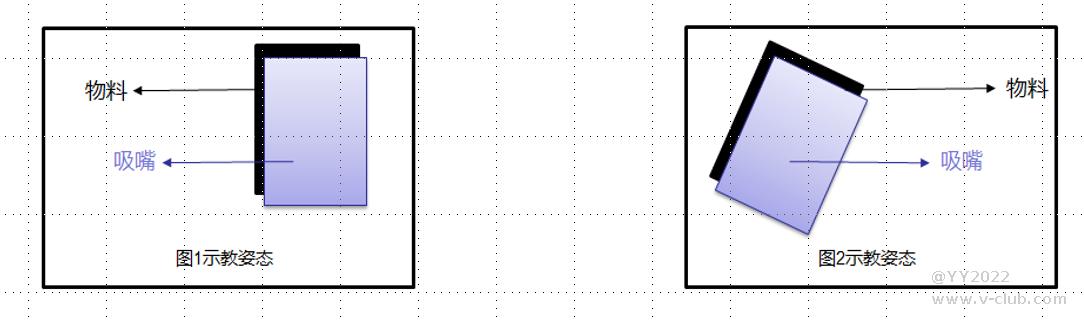
示教:建立标准。无论是抓取还是放置,都需要确定一个标准,来明确正确的姿态是什么;同时需要注意标准是成对出现的,即标准的物料姿态对应着标准的机械手姿态。
做差:计算当前产品位置与示教位置的差值。相机拍照,获取当前产品的坐标,并与保存的示教产品坐标进行计算,得出两个位置的偏移量。
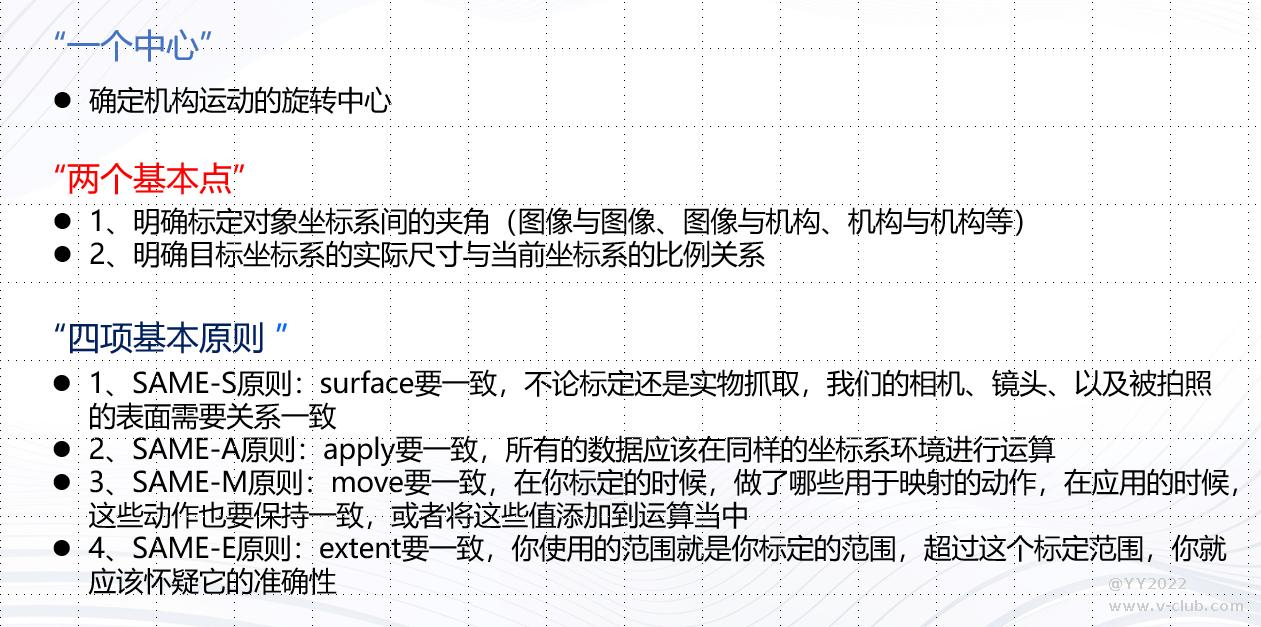
2.3、定位基本原则
3、VM定位方案搭建示例
3.1、单点抓取典型场景
3.1.1、单点抓取标定
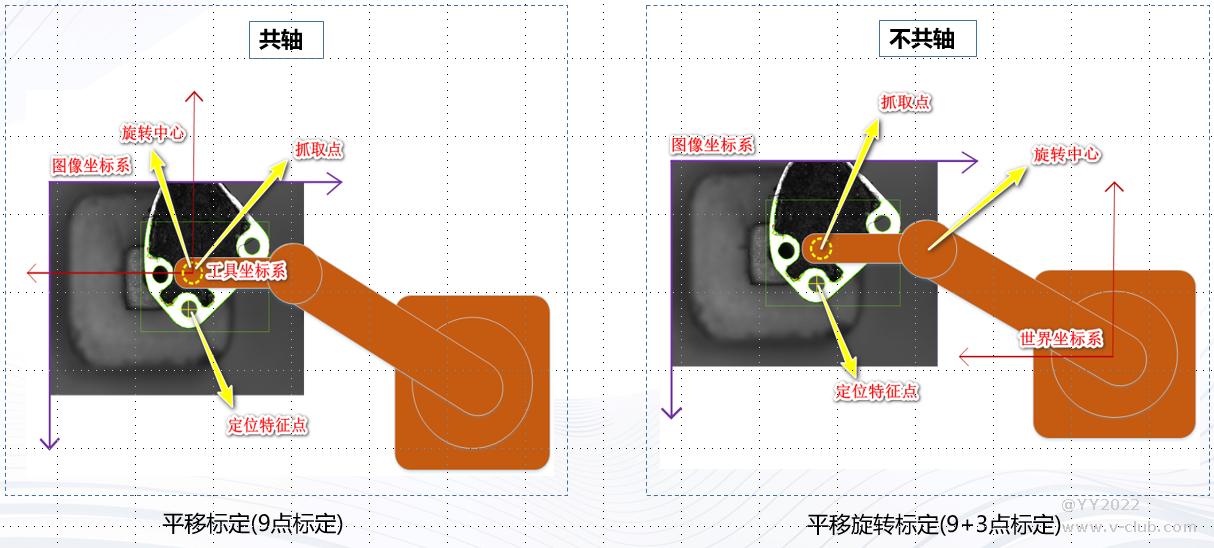
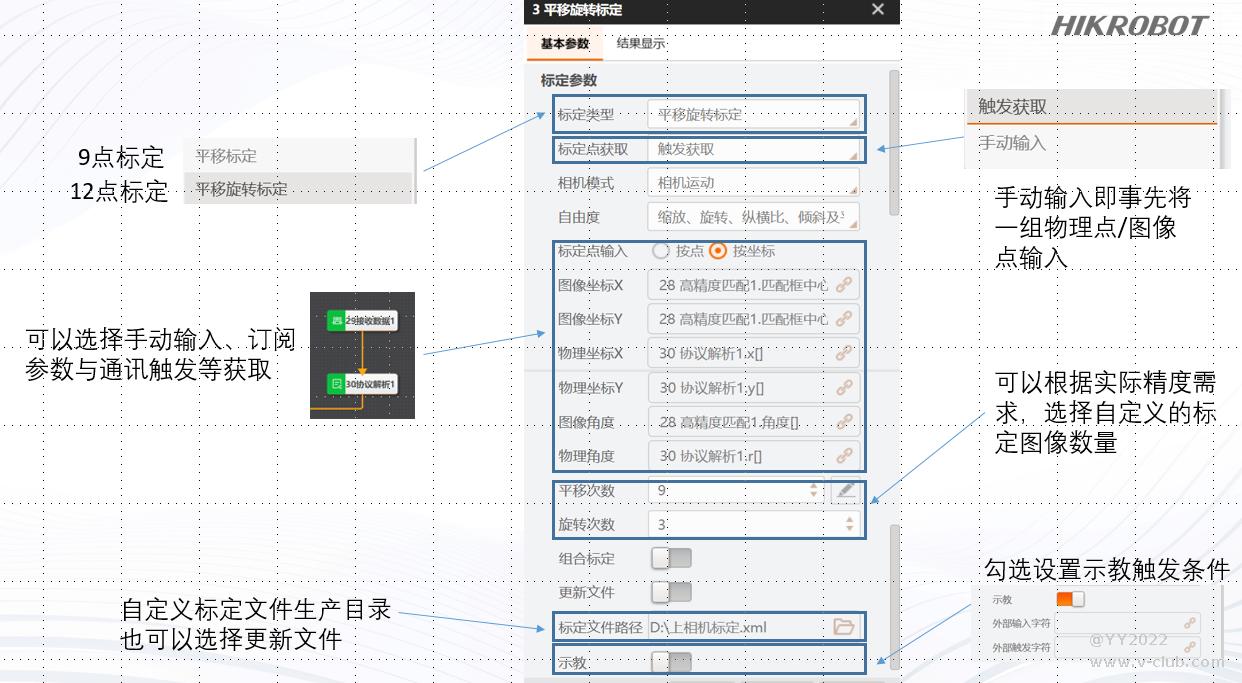
标定选择:选择标定方式和相机状态,以十二点标定为例,标定动作如下:
1)在视野中放置一个物料或标定片。
2)机构带着相机平移9次,平移中保持角度固定。
3)回到中心点,机构带着相机旋转3次,旋转中XY保持固定。
第一步:选择图像源为相机读取或本地读图

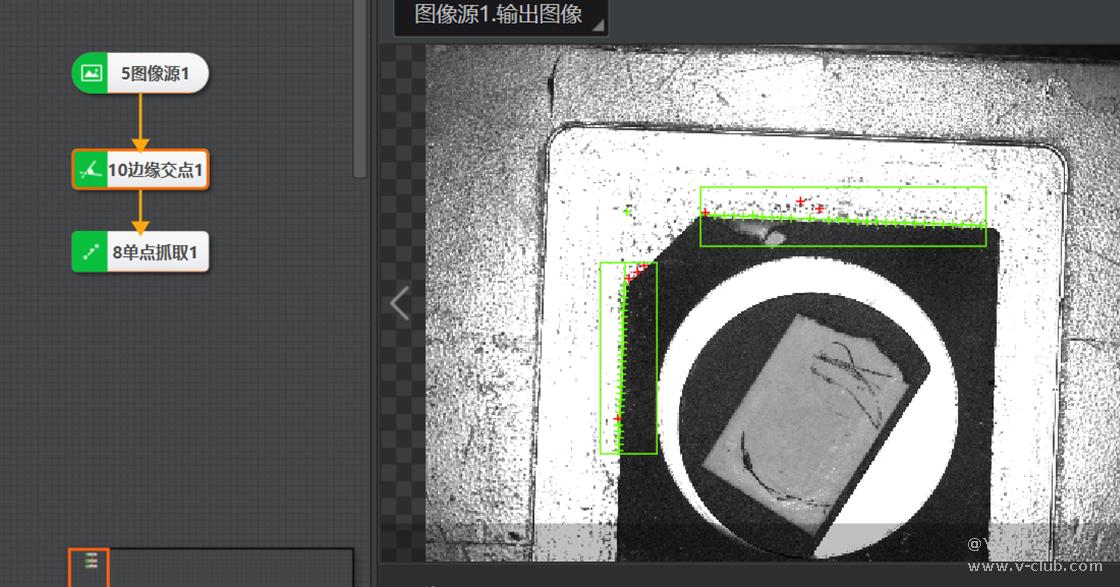
第二步:选择并提取图像源中的固定图像特征点(或选择标定板标定模块)

第三步:配置平移旋转标定模块(采用刚性工件进行标定时)
3.1.2、单点抓取示教
示教动作:
1)放置生产用的物料在工作台中。
2)调整机构位置,使得机构的吸嘴或夹爪可以很好的对准物料,记录此时机构的物理坐标。
3)机构移动到拍照位置(即标定中的第五点坐标),拍摄物料,获得像素坐标。
创建基准: 1)示教抓取物理点为示教时抓取物料的机械手物理坐标;2) 基准图像像素点,为此时拍照位拍照获取的图像像素点。
3.1.3、单点抓取生产
偏差计算流程:
1)生产拍照位与标定时的工作距离必须保持不变。
2)生产拍照位坐标最好与标定第五点拍照位一致,可产生X/Y偏移,但拍照姿态(相机旋转角度)必须保持不变。
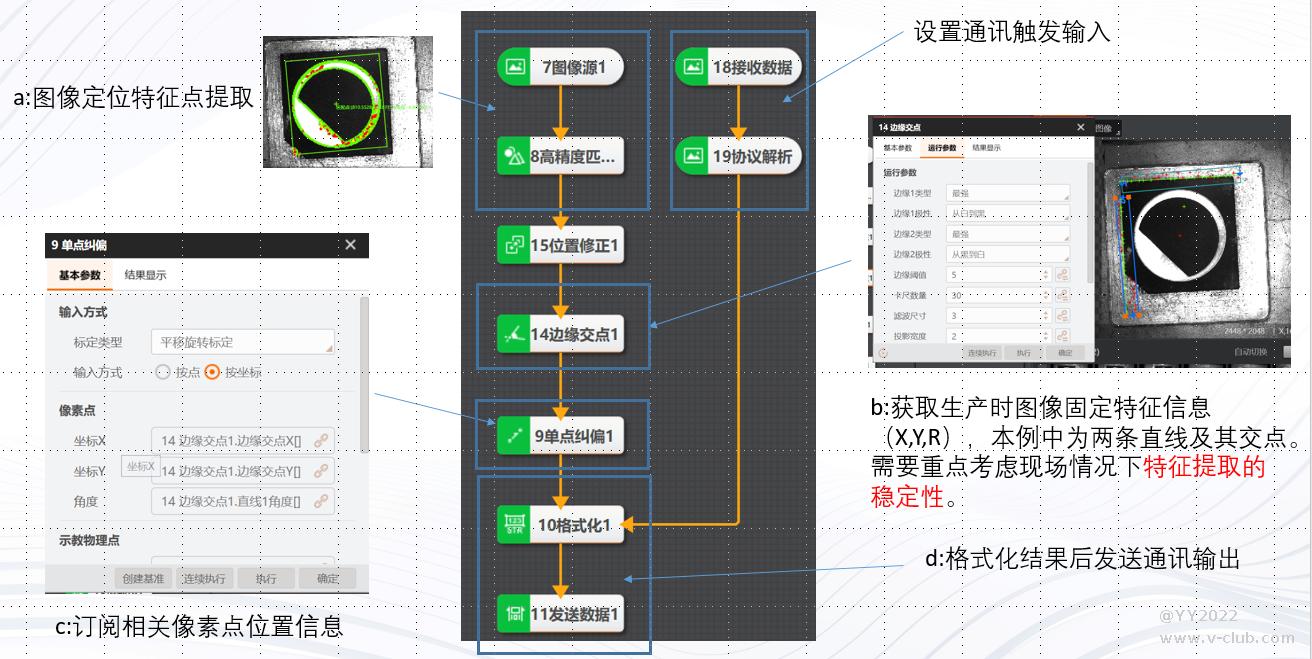
3)生产时需保证提取的特征点与示教图像特征点一致。
4 )示教物理点为示教时刚好抓取到物料时的机械手坐标。

3.2、单点纠偏典型场景
3.2.1、单点纠偏标定
标定选择:选择标定方式和相机状态(常规十二点标定参考单点抓取)。
标定动作:
1)机械手吸取一个物料或标定片在视野中。
2)机构带着物料平移9次,平移中保持角度固定。
3)回到中心点,机构带着物料旋转3次,旋转中XY保持固定。
3.2.2、单点纠偏示教
示教动作:
1)以标准姿态抓住物料吸嘴或者夹爪中。
2) 记录此时机构的物理坐标。
3) 拍摄物料,获得像素坐标。
创建基准: 1)此时机构的物理坐标为示教物理点;2)获得的图像坐标按如图所示创建基准。

3.2.3、单点纠偏生产
偏差计算:
1)生产时机械手抓取物料移动到示教拍照位。
2)生产时需保证提取的特征点与示教图像特征点一致。
3.3、单点映射对位典型场景
3.3.1、单点映射对位标定
标定选择:选择标定方式和相机状态;上下相机映射标定,下相机平移旋转标定。
标定动作:
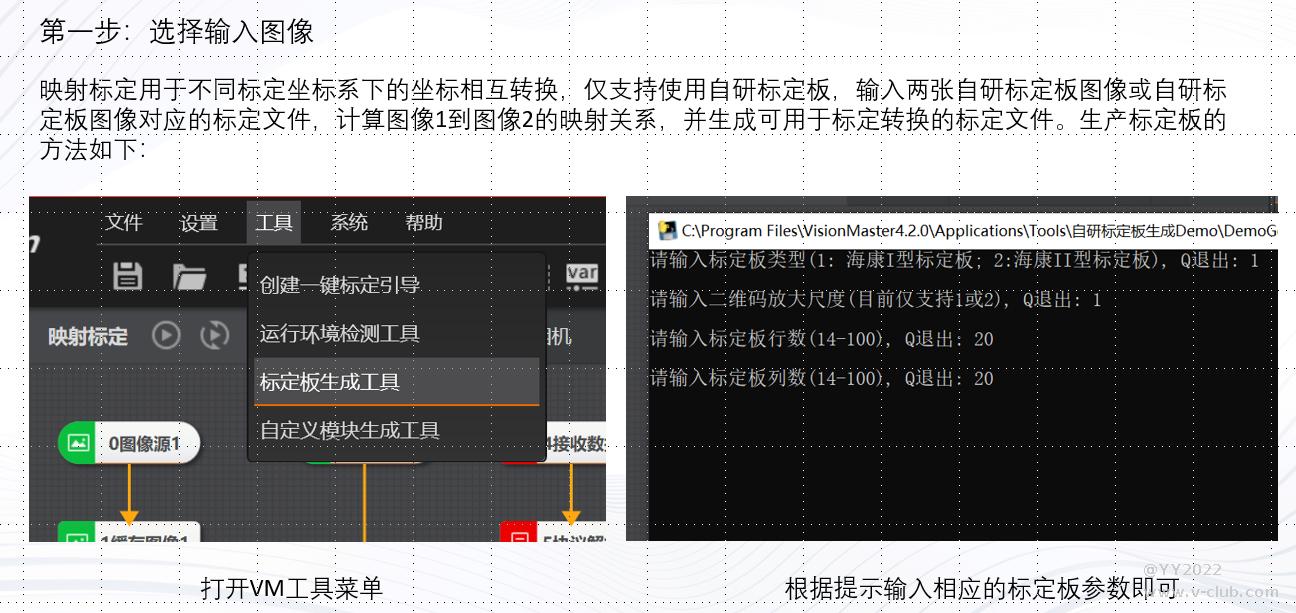
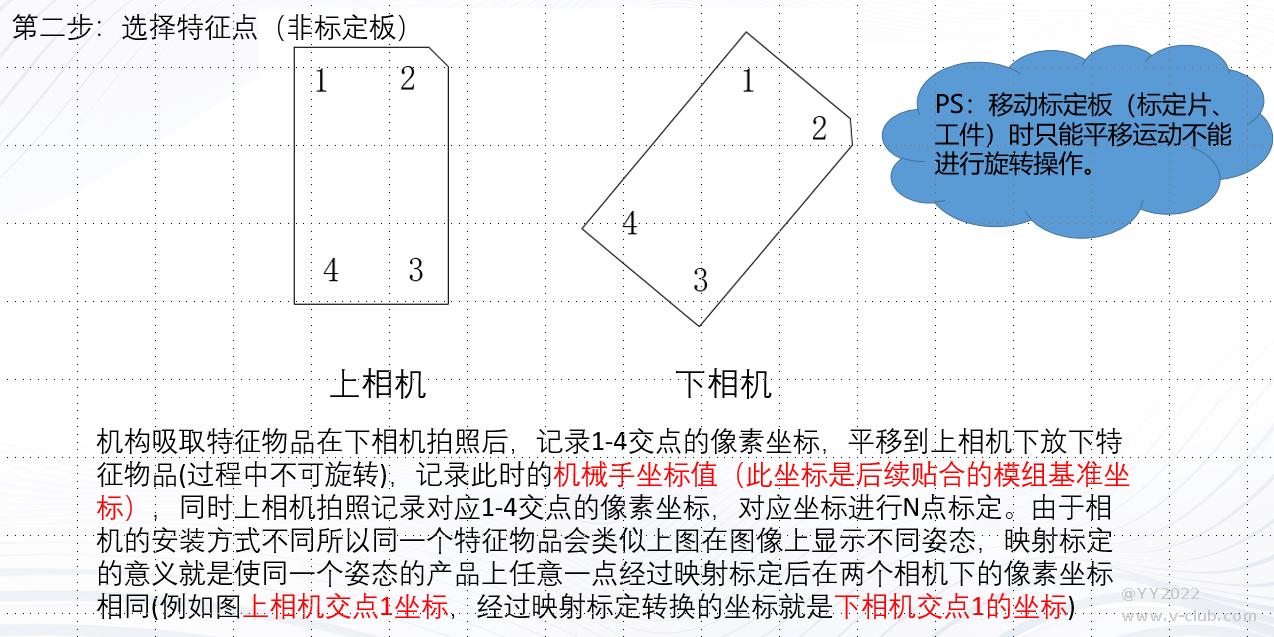
1)映射标定:上相机拍摄标定板(海康Ⅰ型/Ⅱ型标定板),移动机械手抓取标定板并移动至下相机位,下相机拍照,最后将两张标定板图象输入映射标定模块,生成映射标定文件
2)下相机平移旋转标定:同上(常规十二点标定参考单点抓取)

3.3.2、单点映射对位示教
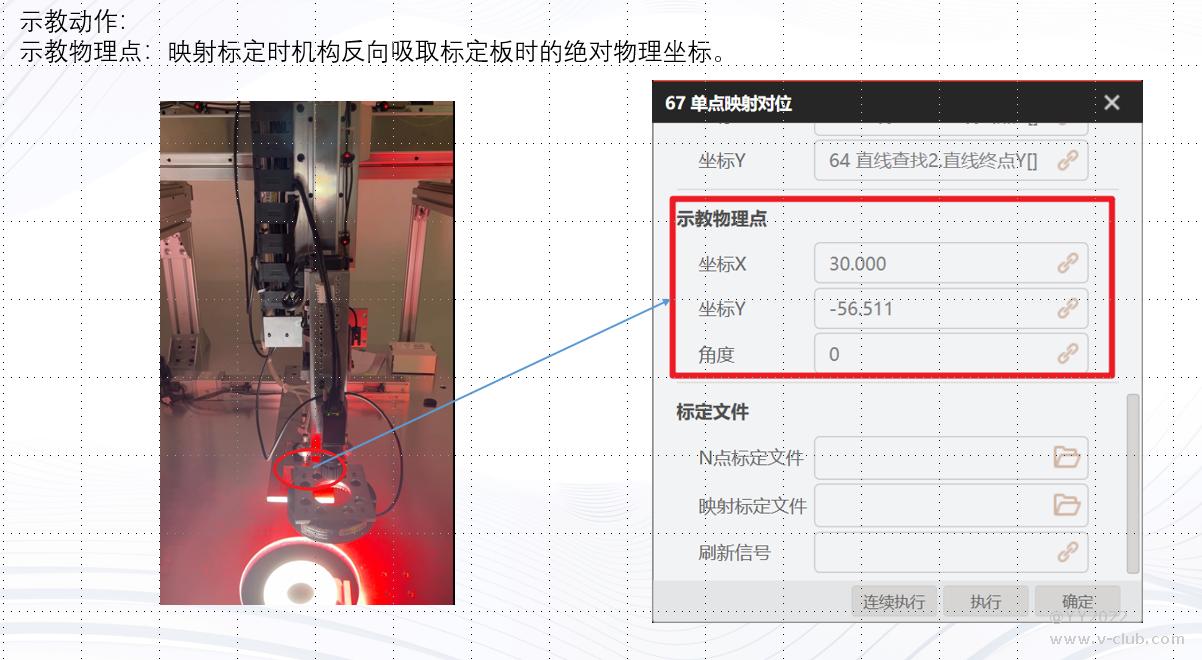
3.3.3、单点映射对位生产
偏差计算:
1)首先机械手抓取物料移动至下相机拍照位获取物料的特征点。
2)然后机械手移动至上相机拍照位,拍摄待贴合物料,进行偏差计算。
第一步,明确坐标系转换关系

1、上相机通过映射标定关联到下相机,下相机与机构做12点标定关联到物理坐标系。
2、下相机拍照后将对象(物料)特征点像素坐标与角度转换到物理坐标系。
3、下相机拍照完成后,上相机拍照将目标(目标物料盘)特征点像素坐标与角度首先转换到下相机坐标系,再转换到物理坐标系。
4、以上完成,上下相机所取特征点与角度就都统一到了物理坐标系,可以直接进行做差运算,得到基于映射标定放置特征物品位的偏差值。
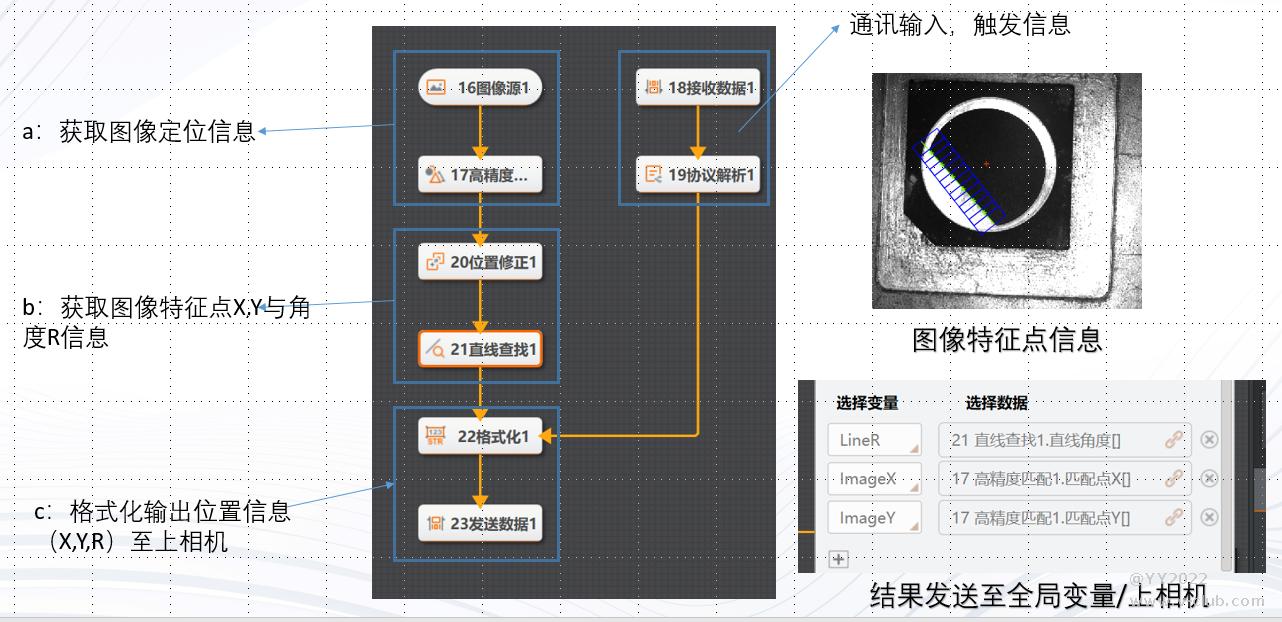
第二步,获取下相机物料特征点信息
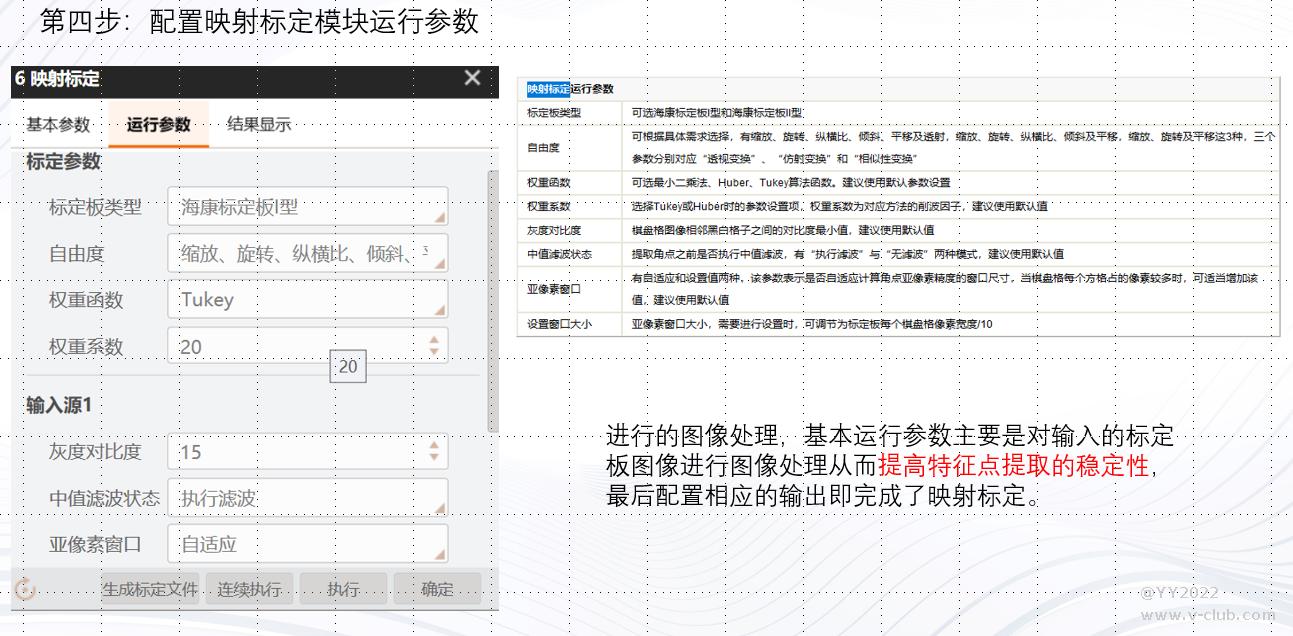
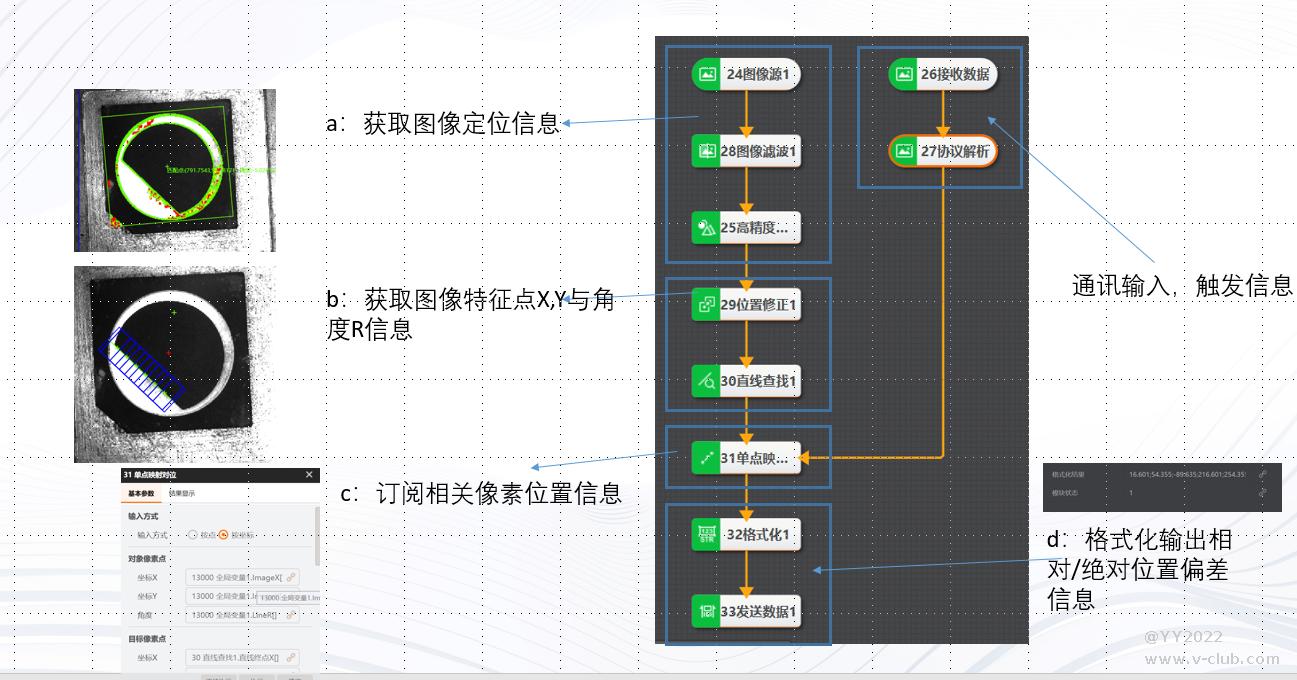
第三步,获取上相机料盘位置信息,配置单点映射对位参数
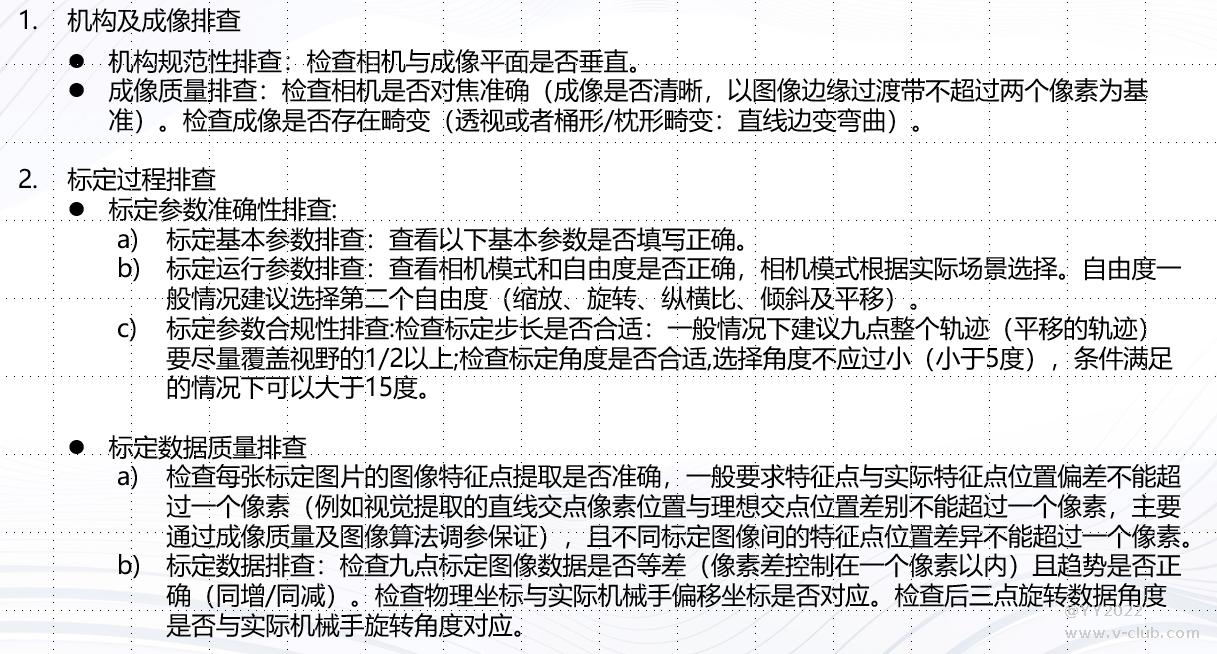
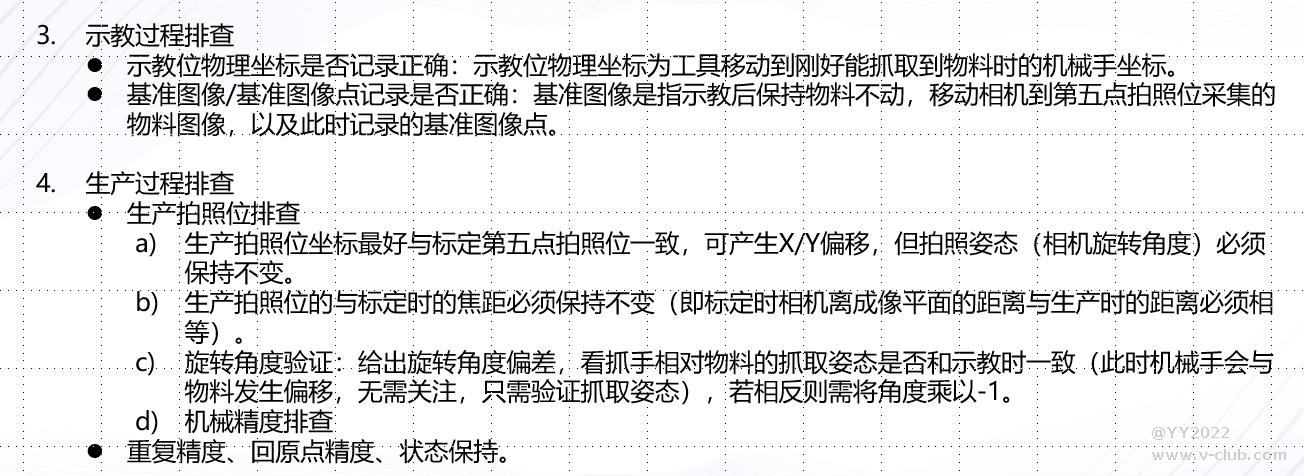
4、常见问题排查思路
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
下一篇
评论请先登录 登录
全部评论 6


有个疑问,上下相机映射标定,机构反向吸取标定板是怎么做的?因为两个相机一上一下,标定板需要翻转吗?翻转了会影响相对关系吧?还是做两面的标定板?望大神解答
2022-11-22 11:26:47 未知地区
回复
0

我需要控制机器人抓取一个矩形物体。相机只能拍到矩形左上角的位置。我想先定位这个角点,再通过计算偏移得到物体的中心点。那在教学阶段,我应该在相机拍到的角点进行物理示教,还是在物体的中心点示教?
2025-07-25 15:28:01 河内
回复
0
- 1

所属专题
相关阅读
 话术-用AI协助编写VM3D脚本模块的代码2026-06-29
话术-用AI协助编写VM3D脚本模块的代码2026-06-29 基于基础应用扩展的偏心抓取算法2026-07-07
基于基础应用扩展的偏心抓取算法2026-07-07 更换主控具体需要准备哪些工具和文件?2026-07-23
更换主控具体需要准备哪些工具和文件?2026-07-23- 移动机器人技术分享-26年7月2026-07-17
 浙公网安备 33010802013223号
浙公网安备 33010802013223号