- 0
- 0
- 分享
- 2022-11-22 19:51
全向车与差速车的区别主要是因为安装在小车上的轮组结构不同而产生的。本文将以2种轮组结构为例,在车轮的硬件结构、功能以及驱动方式三个方面来阐述全向车与差速车的区别。
1、 全向车
全向车的轮组中至少存在1个舵轮。舵轮是一种将驱动电机、转向电机、减速机等电机一体化的机械结构,它可以同时具备驱动和转向两种功能。常见的全向车具备有1个或2个舵轮,同时会按实际需求搭配若干个脚轮。下面将介绍1种典型的全向车轮组机构:
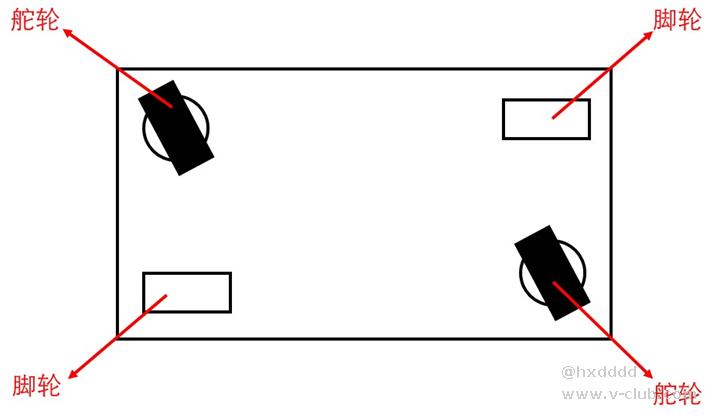
图1、 对角舵轮+对角脚轮组合
如图1所示,该小车的轮组为双舵轮对角布置与双脚轮对角布置。在小车运行时,舵轮驱动带动脚轮运动。此时双舵轮均起到转向与驱动的作用。在小车偏离指定路线时可以自主纠偏。因为双舵轮与双脚轮都可以进行360°旋转,所以该小车可以进行前进、后退、左行、右行等任意方向的平移。同时,因为该小车有2个舵轮且分布在对角,所以该小车可以进行以2个舵轮之间的中心点为旋转点的原地旋转。
2、 差速车
与全向车不同,舵轮并不是差速车所必须具备的。只需要驱动轮和脚轮,差速车也能正常运行。因此接下来主要介绍不存在舵轮的差速车轮组机构:
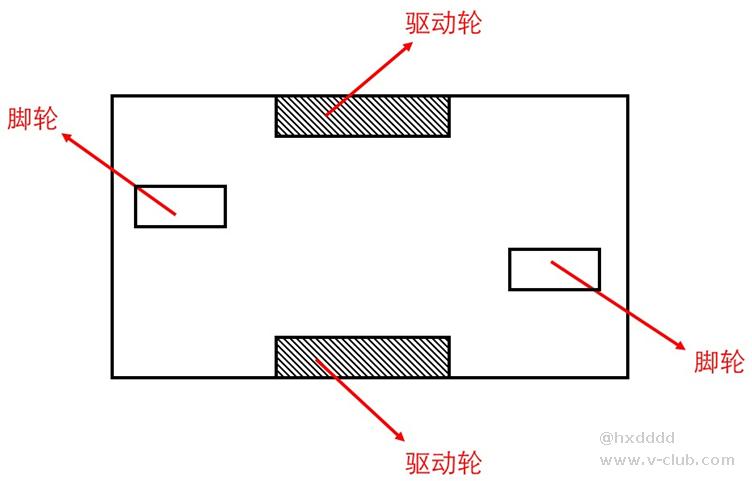
图2、 2驱动轮+2脚轮组合
如图2所示,该小车的轮组为2个安装在车身左右两侧的驱动轮与2个前后对角布置的脚轮。在小车运行时,驱动轮只提供前进或后退的动力。若小车要进行转弯动作,需通过两个驱动轮之间的速度差完成。驱动轮速度与小车运动状态的关系如下图所示:
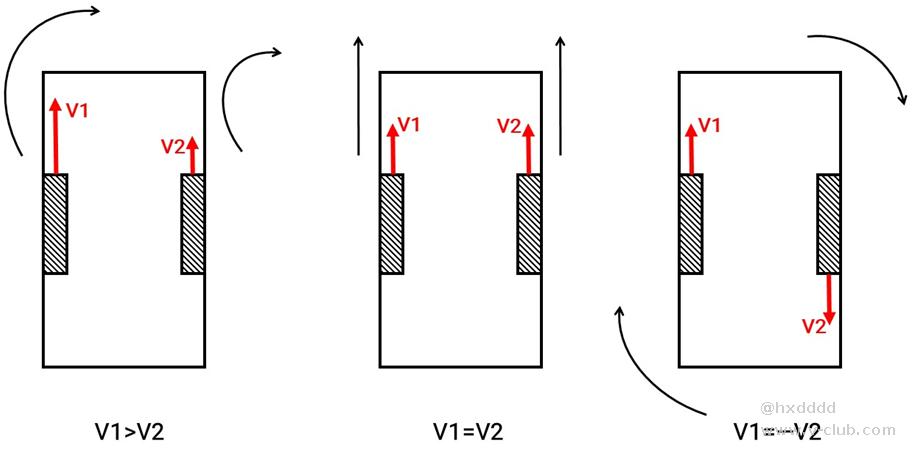
V1为左驱动轮做圆周运动时的线速度,V2为右驱动轮的线速度。
- 当V1>V2时,小车做向右转的圆弧运动;
- 当V1=V2时,小车做驱动方向的直线运动;
- 当V1=-V2时,小车做以左右轮中心为旋转点的原地旋转运动。
因此,该小车可以直接进行前进、后退、转弯和旋转的动作。如果需要直接向左或向右平移,需要首先在原地进行逆时针90°或顺时针90°的自转之后,再继续前进。同时,该小车在转弯时,因为做的是圆弧运动,所以存在一个转弯半径,需提前预留空间。另外,因该小车的驱动轮不具备转向功能,因此在小车偏离指定路线时,该小车只能通过调整行进方向的方式进行纠偏。
3、 总结
综上所述,全向车与差速车的区别如下表所示:
|
|
全向车 |
差速车 |
|
车轮要求 |
1个及以上舵轮 |
/ |
|
行进方向 |
任意方向 |
前、后 |
|
驱动来源 |
舵轮 |
驱动轮/舵轮 |
|
纠偏方式 |
舵轮自主纠偏 |
改变行进方向 |
|
转弯方式 |
舵轮自主转弯 |
速度差 |


 现场运维异常处理手册2025-04-02
现场运维异常处理手册2025-04-02 海康移动机器人实施运维工程师认证资料目录2025-04-15
海康移动机器人实施运维工程师认证资料目录2025-04-15 【VM实现Halcon例程】光度立体法缺陷检测2025-04-17
【VM实现Halcon例程】光度立体法缺陷检测2025-04-17- 关节机器人防护分类分享2025-04-15
 浙公网安备 33010802013223号
浙公网安备 33010802013223号