- 0
- 0
- 分享
- 2022-12-01 16:47
第一章 前期准备
1.1 设备准备
需要一根机器人型号对应的串口调试线,以及一条安卓数据线。

图1-1 串口调试线

图1-2 安卓数据线
第二章 修改语音文件
步骤1 找到机器人喇叭口,使用安卓数据线将机器人与电脑连接,电脑会出现“可移动磁盘”,即为语音播放文件包。

图2-1 潜伏机器人喇叭口

图2-2 可移动磁盘
注意:不同型号的机器人喇叭口在不同位置,本文以潜伏机器人举例。潜伏机器人喇叭口在举升盘下方,可将机器人开机,举升盘旋转90°,便于操作。
步骤2 打开可移动磁盘,内含语音播放文件。
图2-3 语音文件
步骤3 若需烧录语音包,先将现有文件全选删除,再拷入需烧录的语音包文件即可。
步骤4 若需替换个别语音文件,找到对应的文件夹,将其中的文件替换即可。
图2-4
说明:不同位置播放不同语音文件的功能需要定制。
机器人本体需要导入相关语音文件,再进行RCS和嵌入式定制。即:当机器人到达某一位置时,RCS给机器人下发调用某个语音文件的指令。
注意:
1、 电脑需具有USB读写权限。
2、 替换个别语音文件时,注意勿修改文件夹名称。
第三章 修改音量大小
步骤1 使用串口调试线连接机器人和电脑。
步骤2 打开RoboX工具,选择“按IP”的添加方式登录。之后连接机器人。

图3-1

图3-2
步骤3 在参数配置>其他配置>声音参数中可修改音量大小。音量最大为28,修改完成后点击“应用”即可。
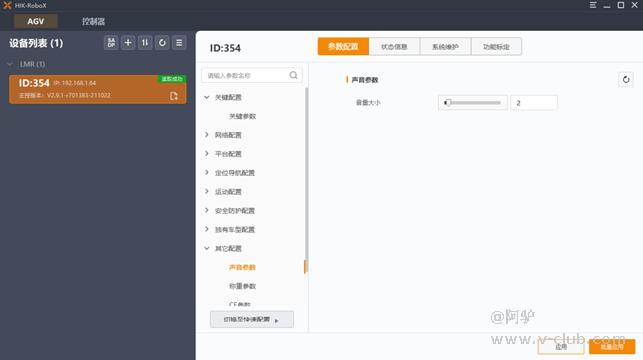
图3-3
语音文件夹名称中的数字对应语音释义关系如下表。
例如:文件夹名称为“AW001”,语音包内容即为“前进”。

图A-1
没有释义的语音编号的文件,表示目前不会产生语音告警,未启用。
表A-1
|
语音编号 |
释义 |
|
0 |
静音 |
|
1 |
前进 |
|
11 |
倒车请注意 |
|
12 |
小车旋转,请注意避让 |
|
13 |
货架旋转,请注意避让 |
|
14 |
举升货架中,请勿靠近 |
|
15 |
下放货架中,请勿靠近 |
|
51 |
走偏 |
|
52 |
连续地码不识别 |
|
53 |
未在地码上 |
|
54 |
未在正确地码上,切换 |
|
55 |
急停状态中 |
|
56 |
碰撞条已触发 |
|
57 |
小车已失联 |
|
58 |
小车网络不通 |
|
59 |
执行机构1、2、3、4货物卡住 |
|
60 |
执行机构1、2、3、4异常取放货 |
|
61 |
挡板执行异常 |
|
62 |
执行机构小板失联 |
|
63 |
初始位置不准,请输入正确准确初始位置 |
|
64 |
未找到正确SLAM地图,请重新导入地图 |
|
65 |
小车IP冲突,请检查网络IP分配 |
|
66 |
AP异常,请查看告警服务器查看具体AP |
|
67 |
图像组件失联,请检查内置组件连接器接口 |
|
68 |
slam组件失联,请检查内置组件连接器接口 |
|
69 |
CE碰撞条已触发 |
|
71 |
RCU 失联 |
|
73 |
货物检测异常,无重量 |
|
74 |
货物检测异常,未贴合门架 |
|
77 |
零位校准失败 |
|
87 |
运动库状态异常,请查看告警码 |
|
88 |
定位库状态异常,请查看告警码 |
|
89 |
感知库状态异常,请查看告警码 |
|
90 |
翻盖机构或传感器异常 |
|
91 |
货物检测异常,请检查控制板或传感器 |
|
92 |
电池通信异常,请检查通信线路 |
|
93 |
充电站未连接,请检查通信线路 |
|
94 |
电池需维护,请用2A小电流人工将电池充满 |
|
95 |
slam激光无数据,请检查激光通信线 |
|
96 |
电池温度过高,请检查电池 |
|
97 |
安全回路已断开 |
|
98 |
安全回路已恢复 |
|
99 |
TOF 相机检测到障碍物,请注意避让 |
|
100 |
左侧叉尖遇障,请注意避让 |
|
101 |
右侧叉尖遇障,请注意避让 |
|
102 |
小车左转请注意避让 |
|
103 |
小车右转,请注意避让 |
|
104 |
走偏出错,请按复位按钮自动上线 |
|
105 |
小车不在拓扑路径,请按复位按钮恢复 |
|
106 |
自动上线路径规划错误,请移动小车重新上线 |
|
107 |
托盘已到位 |
|
108 |
托盘已卸下 |
|
109 |
小板升级中 |
|
110 |
无法获取充电桩IP |
|
111 |
充电通信超时 |
|
112 |
手柄操作中,操作结束请恢复 |
|
113 |
障碍物入侵至小车内部 |
|
114 |
区域激光通信异常 |
|
115 |
轮廓激光异常 |
|
120 |
行走电机异常 |
|
121 |
转向电机异常 |
|
122 |
TOF 相机通信异常 |
|
125 |
小车异常停车,请查看显示屏提示[最多] |
|
127 |
货架无法识别,请检查货架位置是否放正 |
|
128 |
货码无法识别,请检查货架是否偏移 |
|
129 |
货架偏移过大,请调整货架位置 |
|
130 |
货码不匹配,请检查实际货码与显示屏货码是否一致 |
|
131 |
切换地码不识别,请确认地码是否污损 |
|
132 |
前方检测到障碍物,请注意避让 |
|
133 |
后方检测到障碍物,请注意避让 |
|
134 |
左侧检测到障碍物,请注意避让 |
|
135 |
右侧检测到障碍物,请注意避让 |
|
136 |
显示屏操作中,操作结束请恢复 |
|
137 |
充电站连接异常,请检查充电站是否偏移 |
|
138 |
电池电量低,无法举升货架 |
|
139 |
充电指令角度错误 |
|
140 |
平台指令错误 *///该告警尽量不要使用,使用更明确的语音 |
|
14 |
货架不正,请调整货架位置 *///可以用作栈板倾斜过大,无法识别 |
|
142 |
举升机构异常上举 ,无法空车移动请下放恢复 |
|
143 |
调整区域申请失败,请手动调整货架 |
|
144 |
旋转申请暂时失败,请稍后 |
|
145 |
旋转申请不通过,请检查地图配置是否支持旋转 |
|
146 |
货架已举升,无法执行空车移动指令 |
|
147 |
无法执行非直线移动指令 |
|
148 |
非旋转点无法执行旋转指令 |
|
149 |
检测到特殊地码,无法执行旋转指令 |
|
150 |
此版本不支持斜线指令 |
|
151 |
托盘归零失败,请检查托盘零位装置 |
|
152 |
对接微调失败 |
|
153 |
料箱数不匹配 |
|
154 |
作业中请注意安全 |
|
155 |
等待复位按钮确认 |
|
156 |
料箱取放高度异常 |
|
160 |
障碍物入侵至小车内部,请移走障碍物 |
|
198 |
手动模式 |
|
199 |
小车状态异常,请查看显示屏提示 |
|
201 |
急停恢复 |
|
202 |
地码已识别 |
|
203 |
避障关闭提示 |



 话术-用AI协助编写VM3D脚本模块的代码2026-06-29
话术-用AI协助编写VM3D脚本模块的代码2026-06-29 基于基础应用扩展的偏心抓取算法2026-07-07
基于基础应用扩展的偏心抓取算法2026-07-07 更换主控具体需要准备哪些工具和文件?2026-07-23
更换主控具体需要准备哪些工具和文件?2026-07-23- 移动机器人技术分享-26年7月2026-07-17
 浙公网安备 33010802013223号
浙公网安备 33010802013223号