



- 自定义算法模块添加多幅图像输入的方法
- 自定义算法模块点集输入、输出实现方法
- 自定义算法模块输出和显示矩形检测框的方法
- 自定义算法模块获取输入直线的方法
- 自定义算法模块打印日志的方法
- YoloV5ForVisionMaster
- Sauvola二值化处理在图像处理应用的优势介绍分析
自定义算法模块获取输入直线的方法
- 0
- 0
- 分享
- 2022-12-19 10:49
自定义算法模块如何获取输入直线,从而扩展到直线边缘缺陷检测等算法领域?
1. 在算法模块生成器的自定义输入输出中配置输入直线参数
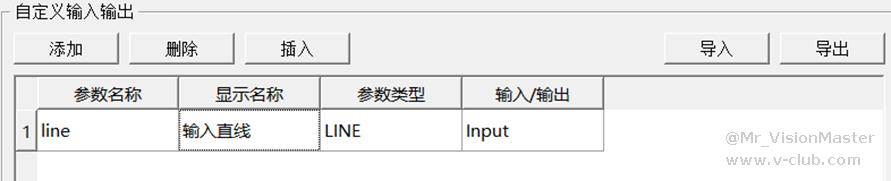
编译界面工程、算法工程,并将文件拷贝到工具箱目录后,模块界面如下图所示。

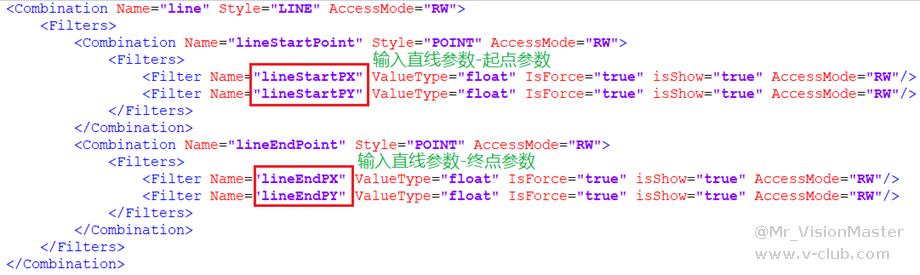
输入直线的参数名称从模块.xml中查看,子元素类型均为float。
2. 在算法工程中获取输入直线的数据
首先在AlgorithmModule.h文件中定义输入直线的起点、终点变量,示例代码如下:
float lineStartPX;
float lineStartPY;
float lineEndPX;
float lineEndPY; 然后在AlgorithmModule.cpp文件的Process函数中获取输入直线的数据,示例代码如下:
int nRet = IMVS_EC_UNKNOWN;
HKA_CHECK_ERROR((IMVS_NULL == hInput || IMVS_NULL == hOutput), IMVS_EC_PARAM);
HKA_F32 fValue = 0;
int nArrayCount = 0;
nRet = VM_M_GetFloat(hInput, "lineStartPX", 0, &fValue, &nArrayCount);
if (IMVS_EC_OK == nRet && nArrayCount > 0)
{
lineStartPX = fValue;
}
HKA_MODU_CHECK_ERROR(IMVS_EC_OK != nRet, nRet);
VM_M_GetFloat(hInput, "lineStartPY", 0, &fValue, &nArrayCount);
if (IMVS_EC_OK == nRet && nArrayCount > 0)
{
lineStartPY = fValue;
}
HKA_MODU_CHECK_ERROR(IMVS_EC_OK != nRet, nRet);
VM_M_GetFloat(hInput, "lineEndPX", 0, &fValue, &nArrayCount);
if (IMVS_EC_OK == nRet && nArrayCount > 0)
{
lineEndPX = fValue;
}
HKA_MODU_CHECK_ERROR(IMVS_EC_OK != nRet, nRet);
VM_M_GetFloat(hInput, "lineEndPY", 0, &fValue, &nArrayCount);
if (IMVS_EC_OK == nRet && nArrayCount > 0)
{
lineEndPY = fValue;
}
HKA_MODU_CHECK_ERROR(IMVS_EC_OK != nRet, nRet); 至此,实现模块输入直线的配置与数据获取。
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
下一篇
评论请先登录 登录
全部评论 0

所属专题
相关阅读
 【形状匹配算法系列】从NCC到轮廓匹配:工业视觉的"定位之争",到底争的是什么?2026-05-19
【形状匹配算法系列】从NCC到轮廓匹配:工业视觉的"定位之争",到底争的是什么?2026-05-19 使用VM算法识别屏幕2026-06-05
使用VM算法识别屏幕2026-06-05 移动机器人工程师培训与认证安排-26年6月2026-05-18
移动机器人工程师培训与认证安排-26年6月2026-05-18- 移动机器人技术分享-26年5月2026-05-15
 【第四届启智杯大赛决赛】+开发赛道+迹你实在是太美+参赛作品分享2026-06-01
【第四届启智杯大赛决赛】+开发赛道+迹你实在是太美+参赛作品分享2026-06-01
 浙公网安备 33010802013223号
浙公网安备 33010802013223号