- 0
- 0
- 分享
- 2023-01-31 09:46
一、案例背景
(1) 项目需求
- 提高标签贴合效率和精度
- 降低人工成本
(2) 项目痛点
人工贴合标签成本高,易出现贴合不精确,合格率低下等问题,因此借助视觉对标签贴合方式进行优化。
二、方案描述
(1)配单表

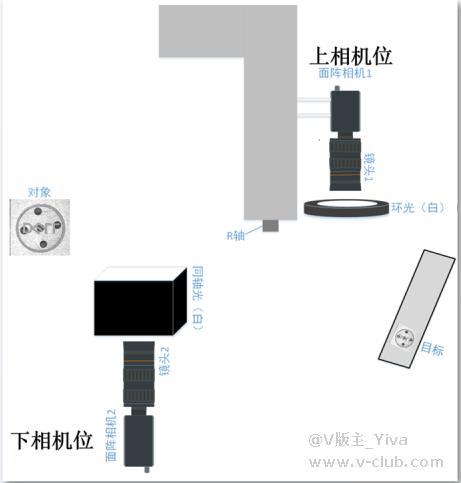
(2)方案示意图
(3)方案思路
- 采用工业相机,搭配FA镜头,在固定的工作距离下,对对象和目标进行拍摄。注意:上相机位无法旋转,机械臂有独立R轴
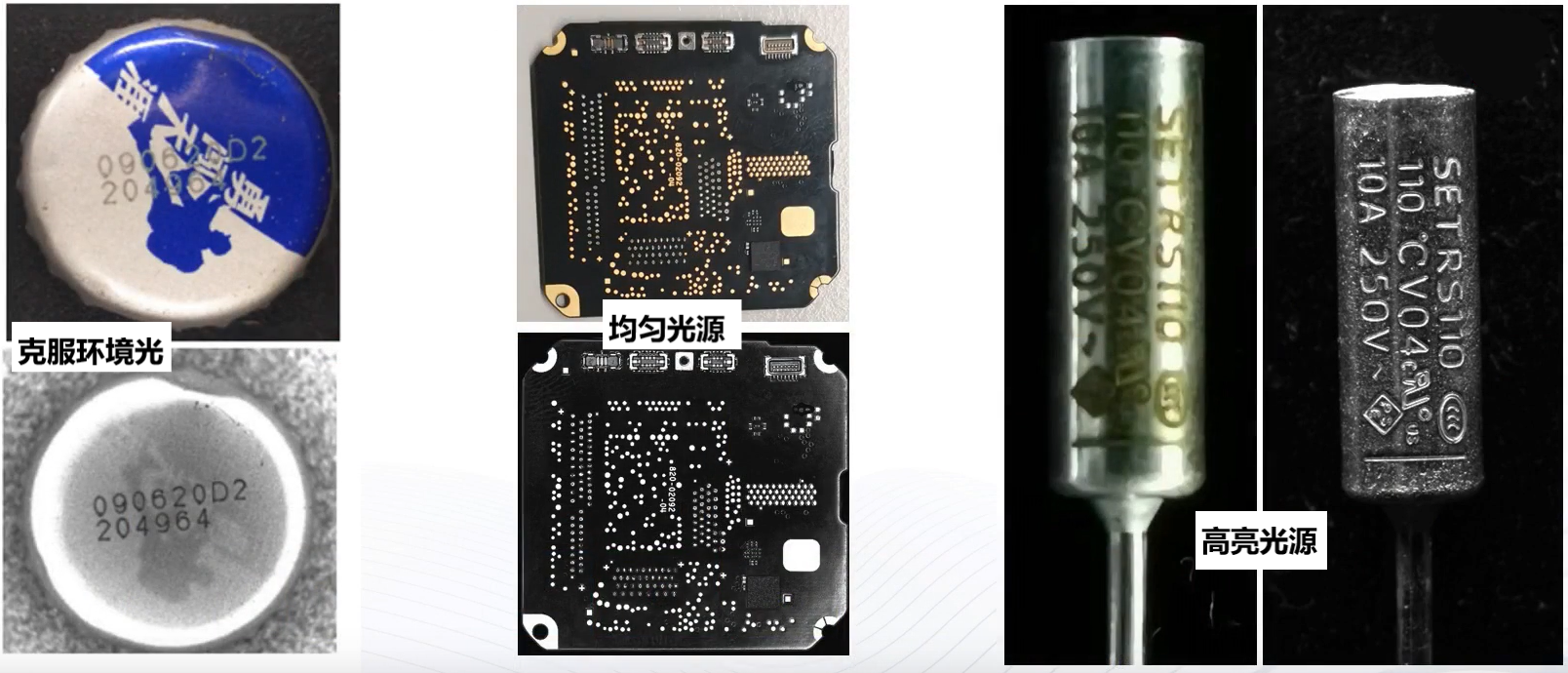
- 下光源选择同轴光源,能凸显对象表面不平整,克服表面反光
(4)方案描述
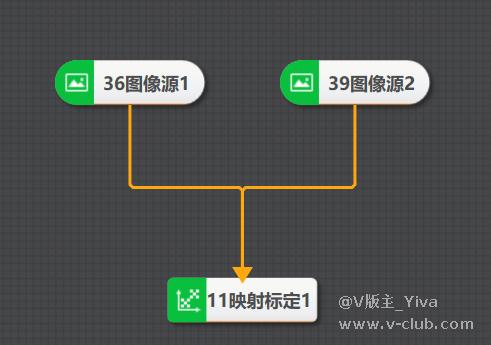
上下相机映射标定
方案1:物料为基准(相机映射)
上下相机分别在各自拍照位进行采图后,在两张图片上选取位置一一对应的点,下、上相机点分别定义为示教点和运行点,运行参数中的自由度选择第二种(缩放、旋转、纵横比、倾斜及平移),最后点击执行后生成上映射下的相机映射标定文件。
方案2:海康Ⅱ型标定板为基准(映射标定)
吸嘴吸取海康Ⅱ型标定板先后移动至下相机拍照位拍照,随后机械臂平移将标定板放置在示教位,将上相机移动至拍照位进行拍照(过程中保证标定板不发生位置和角度偏移)。将上下相机所采图像直接进行映射标定,在映射标定模块运行参数中选取正确的标定板和自由度(同相机映射),点击执行后再设置路径下生成映射标定文件。
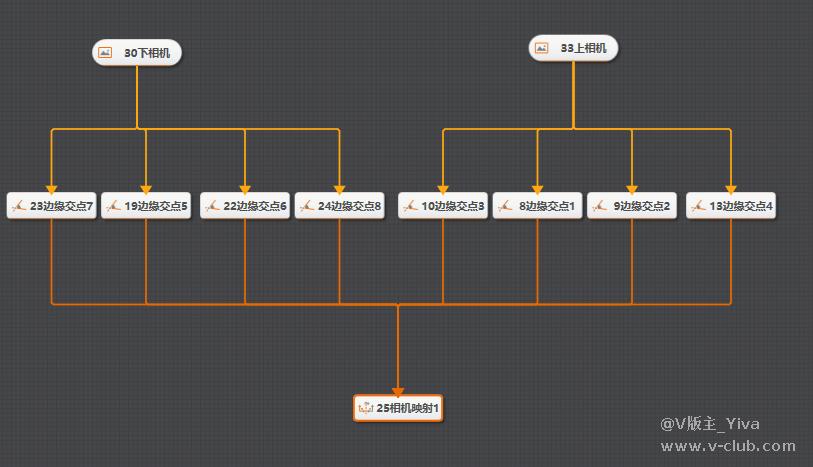
下相机标定
方案1:N图像标定
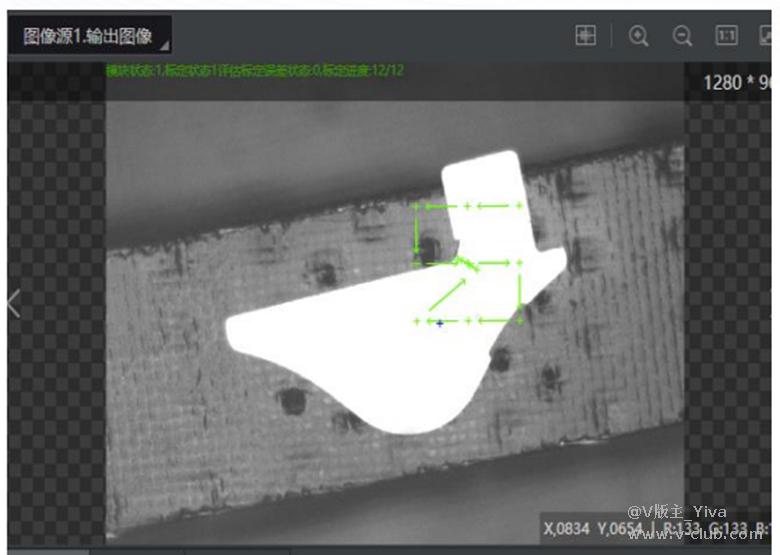
吸嘴吸取海康Ⅱ型标定板移动至下相机拍照位对对象拍照,随后在N图像标定模块中设置标定文件路径、平移次数(X,Y偏移量)、旋转次数(角度偏移量),在运行参数界面选择标定板类型,其余选项默认。操控机械臂按照12点标定路线移动一次点击一次单次执行采图,12点执行完后,会等待1-2 min,最后点击生成标定文件即可。

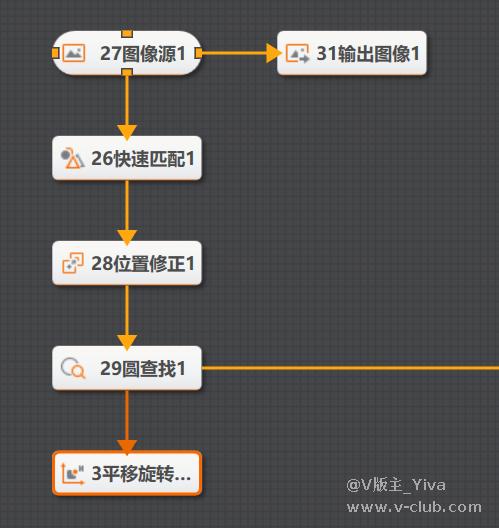
方案2:平移旋转标定
吸嘴吸取物料移动至下相机拍照位对对象拍照,进行特征匹配、位置修正和圆查找(根据实际情况定),随后在平移旋转标定模块中设置各类参数(自由度还是选择第二种),以圆查找圆心为基准点设置平移次数(X,Y偏移量)、旋转次数(角度偏移量),确定标定文件路径后操控机械臂按照12点标定路线移动一次点击一次单次执行,12点执行完后,最后点击生成标定文件即可。
1个知识点:N图像标定、N点标定和平移旋转标定的区别
- N图像标定模块为VM4.2新增功能模块,其可用标定板标定或者物料标定,基准点是图像中无数的点,标定效果更好且在标定过程中可改动X、Y和R的偏移量
- N点标定同平移旋转标定基本相同,标定板标定或者物料标定,基准点多为特征匹配点(单个点),标定效果略逊N图像标定
映射对位下相机
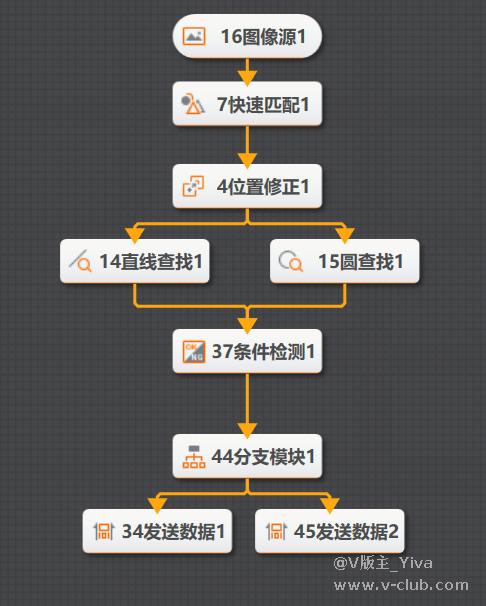
吸嘴吸取物料移动至下相机拍照位对对象拍照,进行特征匹配、位置修正、直线查找和圆查找(根据实际物料情况定),随后条件检测模块设置OK判断条件,若条件检测模块OK(1)则进入发送数据模块发送下相机拍照结束信号,绑定全局变量下相机OK值;若条件检测模块NG(0)则发送发送下相机拍照结束信号,绑定全局变量下相机NG值。
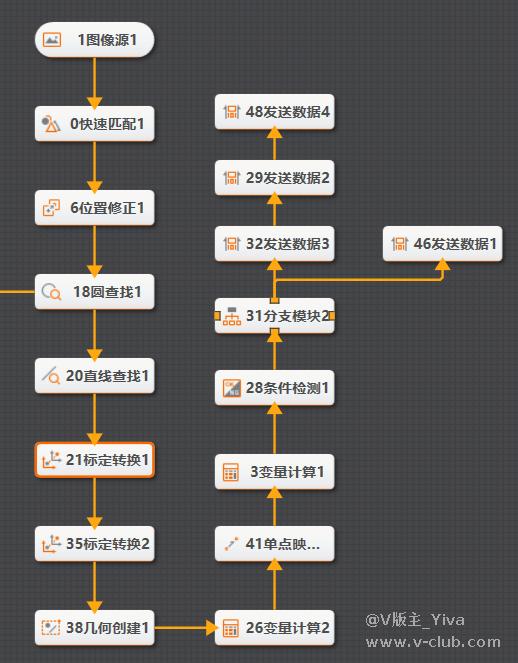
映射对位上相机
操控机械臂至上相机拍照位对目标进行拍照,按照下相机对位情况进行相同位置的特征查找。随后,使用单点映射对位模块,绑定各特征信息、示教位、12点标定和映射标定文件(注意的是角度补偿要在单点映射对位前),最终给出X、Y和R的偏移量,按照逻辑将信息发送给PLC。
(5)展示效果
三、项目优势
- 项目实际算法耗时约2秒,场景适应行较强,现场每天生产1000+,合格率可达99.8%。
- 贴合精度可达0.01mm,且操作简便。
- 项目交付了一套能够高效且准确贴合品牌标签的自动设备,提高了整体生产效率,合格率提高了40%。



 现场运维异常处理手册2025-04-02
现场运维异常处理手册2025-04-02 海康移动机器人实施运维工程师认证资料目录2025-04-15
海康移动机器人实施运维工程师认证资料目录2025-04-15 【VM实现Halcon例程】光度立体法缺陷检测2025-04-17
【VM实现Halcon例程】光度立体法缺陷检测2025-04-17- 关节机器人防护分类分享2025-04-15
 浙公网安备 33010802013223号
浙公网安备 33010802013223号