- 0
- 0
- 分享
- 2023-02-02 17:16
一、案例背景
(1) 项目需求
- 实现振动盘产品的吸取,定位精度±0.25mm
- 判断产品的方向,区分左右方向
- 需要筛选出上下方向物料,不为正面朝上不能抓取
- 安全区功能,需要筛选出振动盘挨得近的物料
- 需要筛选出混料,不为同款物料不能抓取
(2) 项目痛点
- 抓取的产品为空间的异形件,需要较高的精准度
- 成像视野较大,边缘产品会存在一定的畸变,且畸变矫正算法矫正的精度有限
- 抓取的产品有近12mm的厚度,光学成像影响严重,会直接导致图像抓不到产品的真实边
- 产品区分左右方向极为类似,而又需要360度抓取,模板匹配无法锁住模板延拓功能,筛选困难
- 产品种类繁多,换料频繁
二、方案描述
(1)配单表

(2)方案示意图
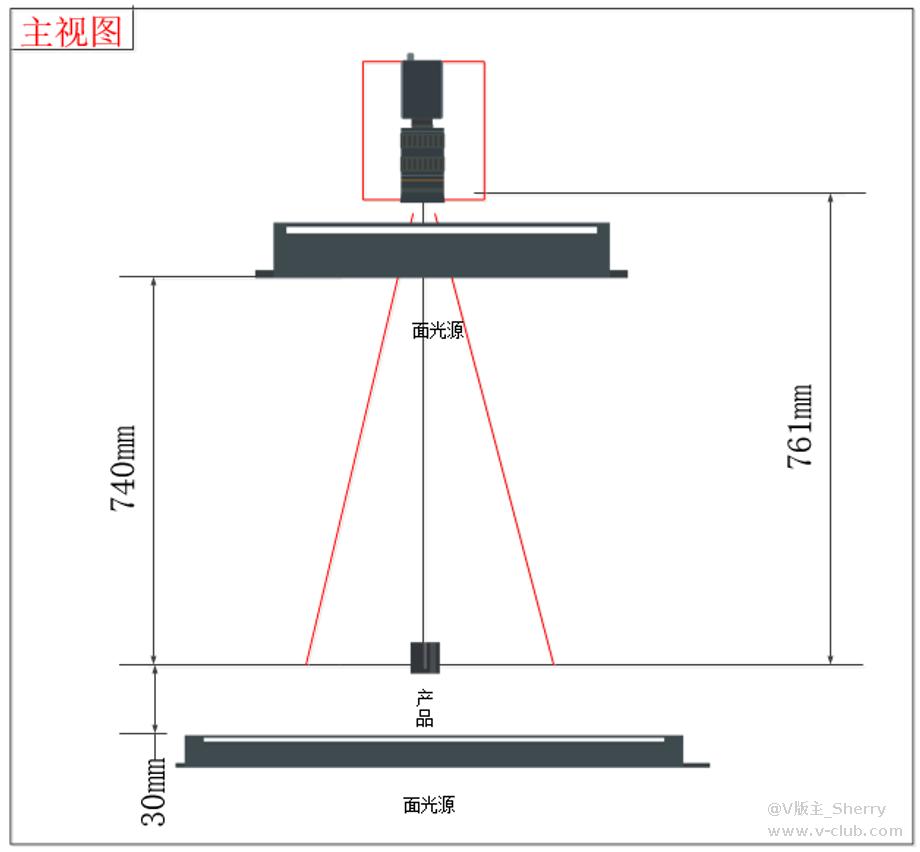
(3)方案思路
•采用了背光源,打出工件轮廓,便于图像的真实边缘提取。
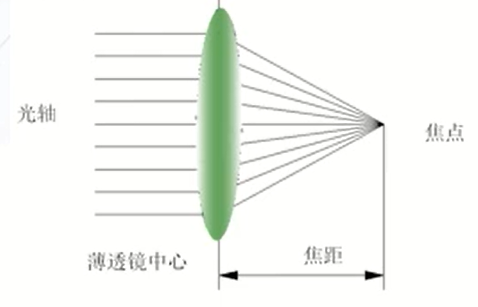
•采用FA镜头,高工作距离,小光圈,在硬件配置固定下,提高景深兼容。
(4)方案描述
按照实现定位抓取的三部曲,主要分为以下几个步骤:
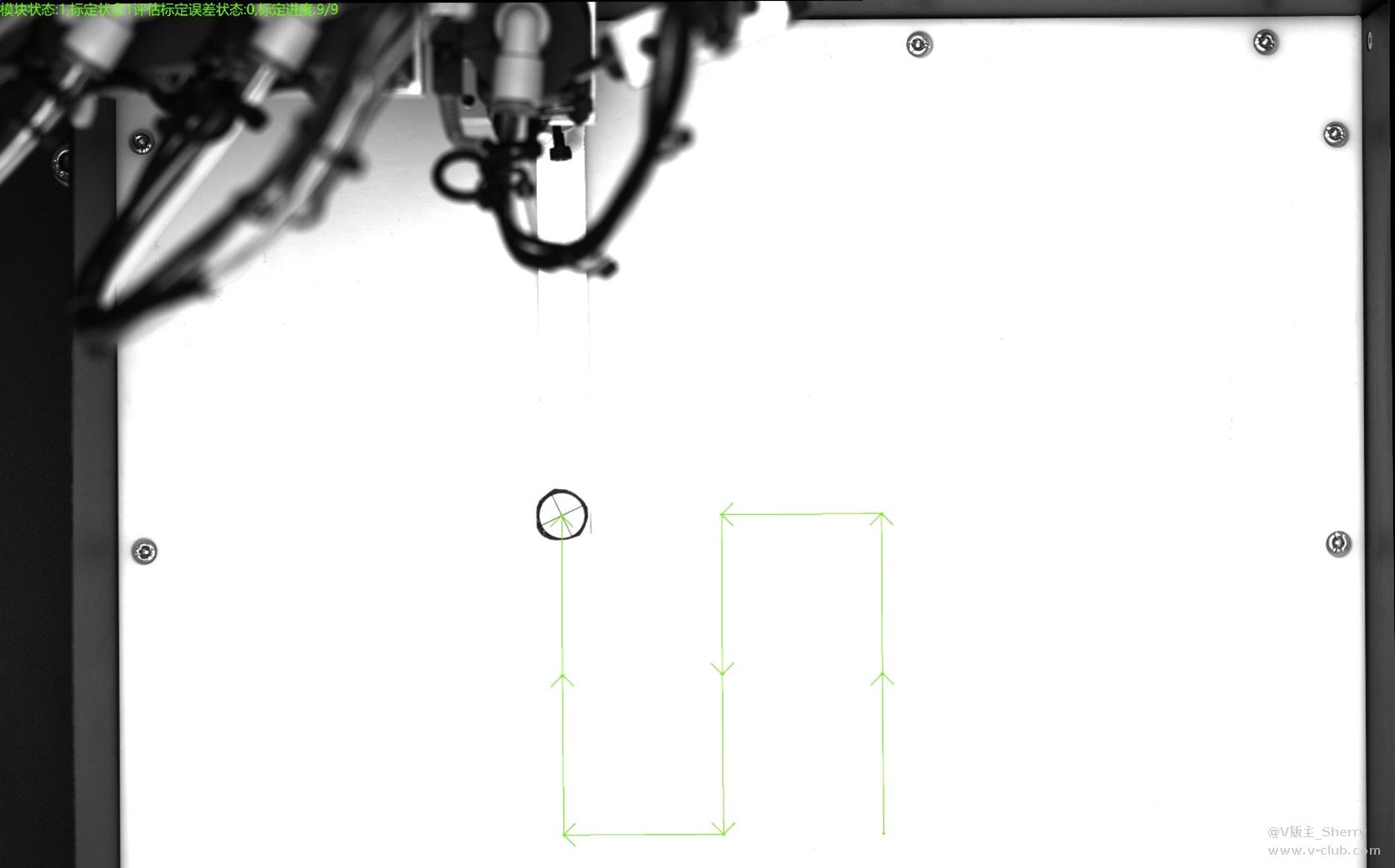
①标定:由于有大视野的畸变影响,标定为确保精度,需先进行畸变标定。为了避免旋转中心给平移标定带来的影响,本方案为九点平移标定与旋转标定分开标定。
九点标定:建立图像坐标系与物理坐标系的关系矩阵。
•采用机构吸嘴加一根60mm 的长连杆,做平移9点的相对坐标标定。
•标定的验证。
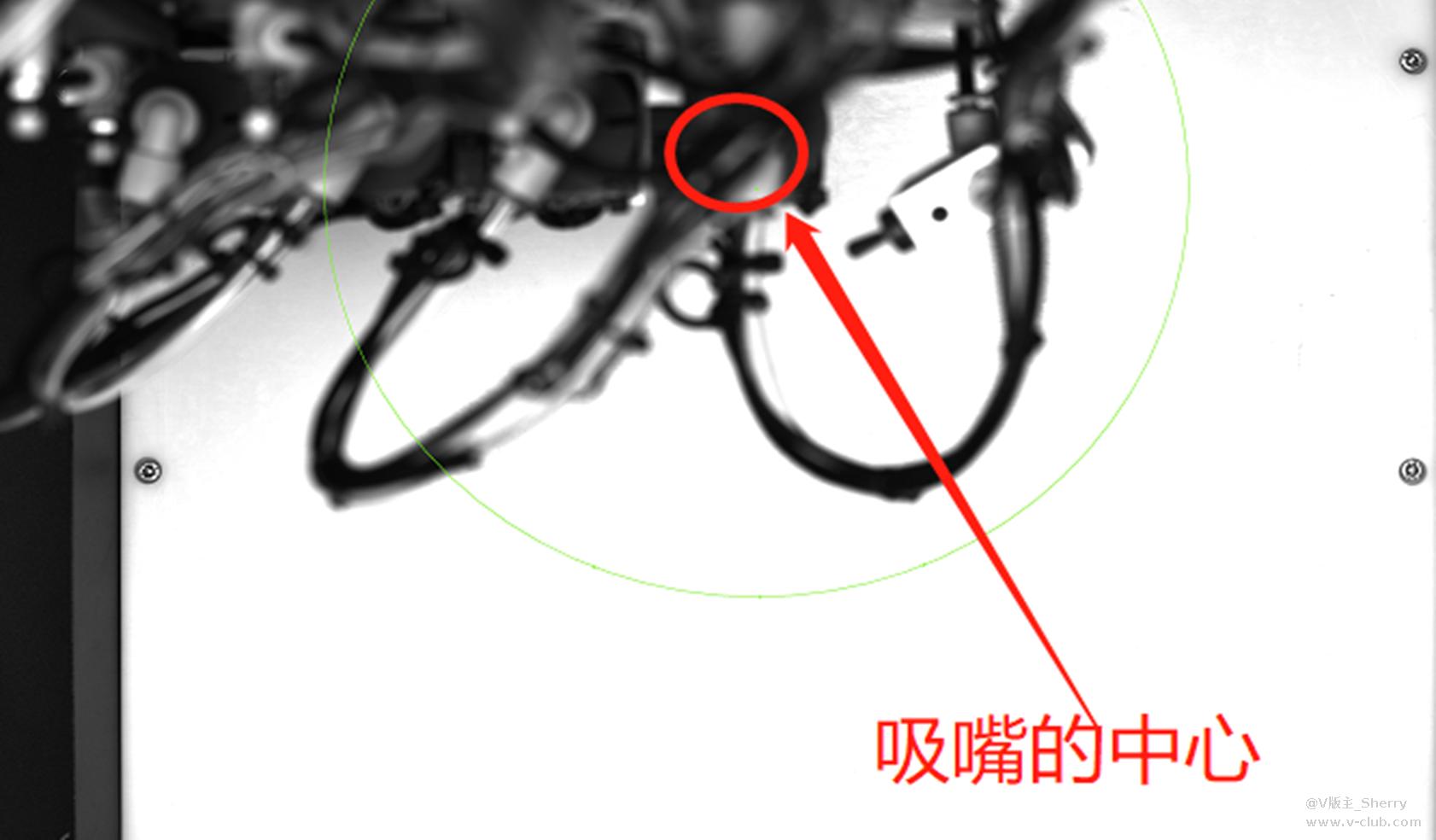
旋转标定:建立图像坐标系与物理坐标系的关系矩阵
•旋转轴的旋转中心单独标定
•旋转标定的验证
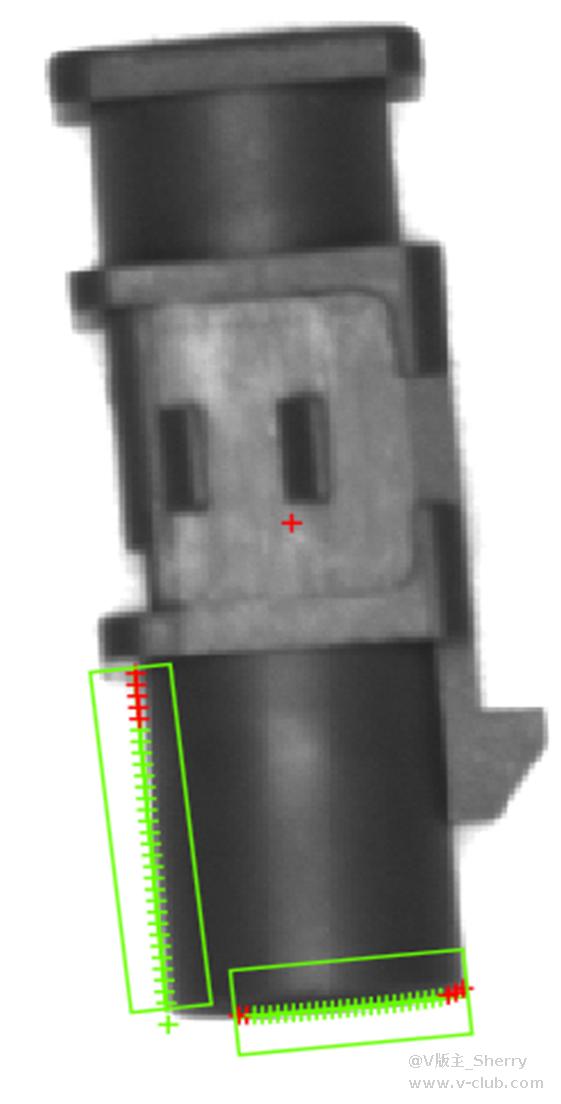
②示教与基准建立:使用标定的第五点作为标准姿态抓取产品,记录此时机械手的坐标作为示教坐标,记录此时图像为基准图像,用VM求得其图像坐标。
示教基准:使用机构带动产品到标定的第五点进行基准建立。
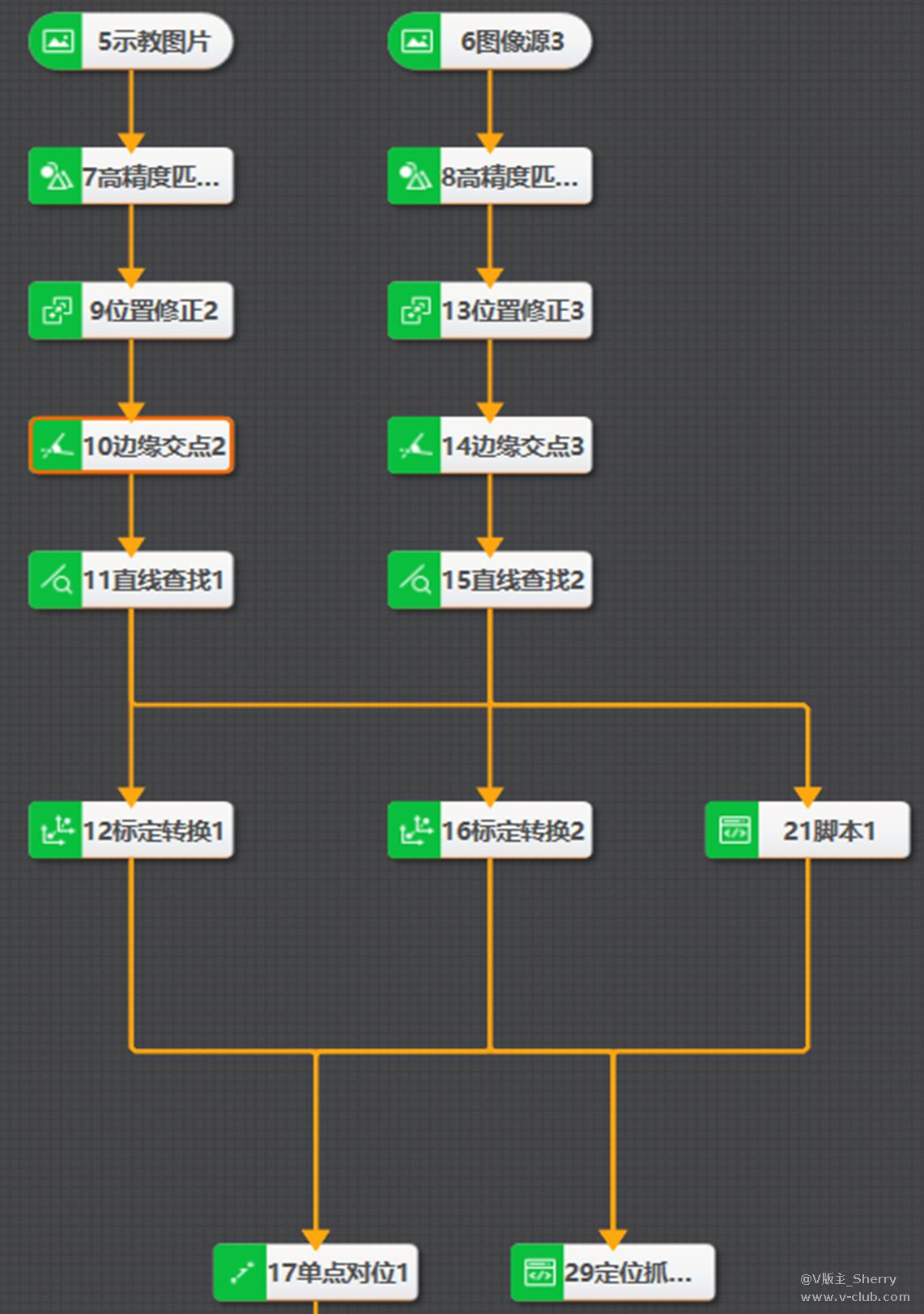
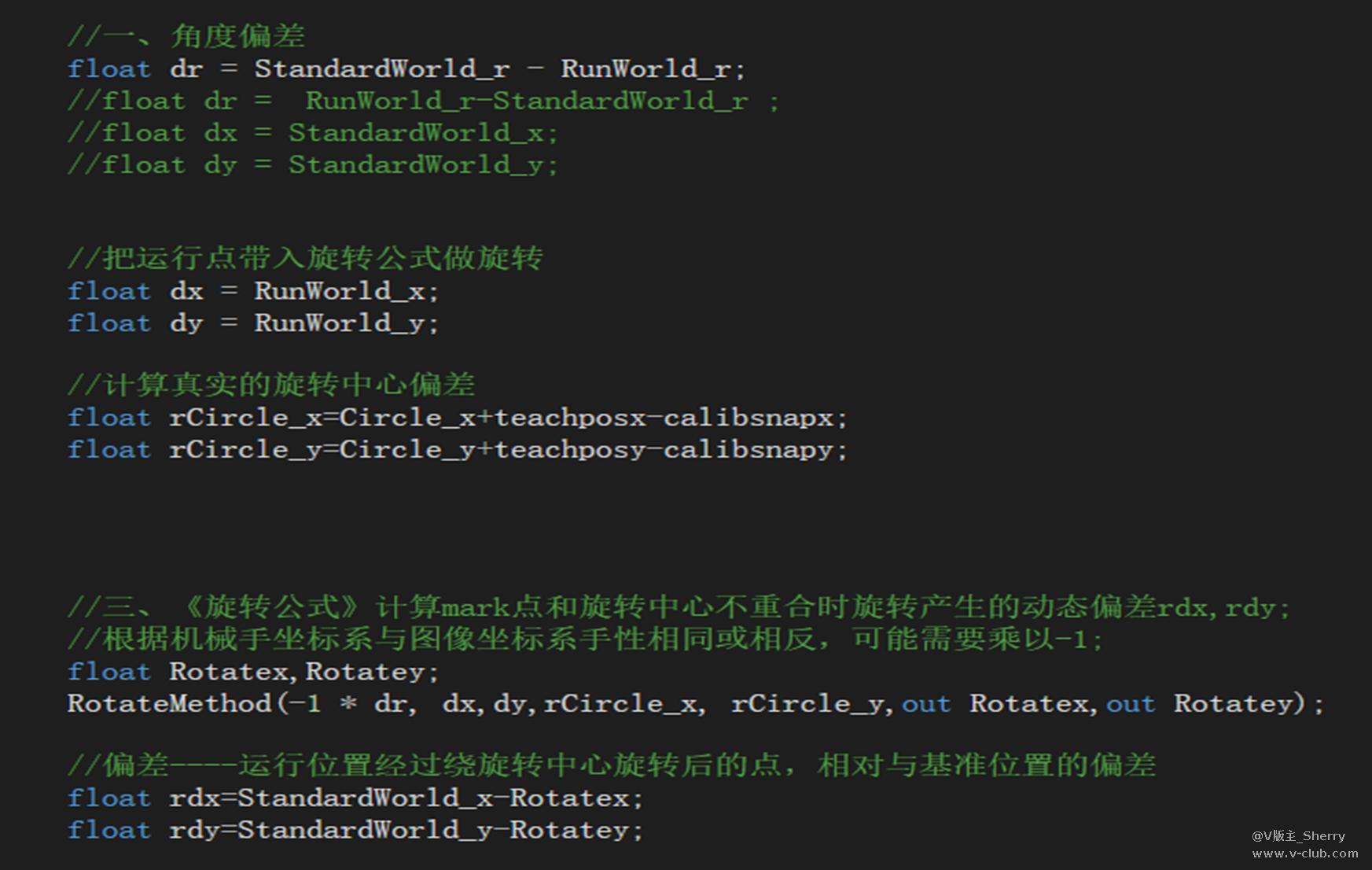
③求差:使用基准图像坐标数据与实时运行数据代入旋转公式进行求差计算,得到偏移量数据。
求差计算:利用旋转公式,代入转换后的物理坐标,对基准与运行位置的产品进行求差计算,得到相对偏移量。
三、项目优势
•赋能了客户使用VM进行视觉项目集成开发的能力,促成了第一代柔性振动盘标准机的项目落地,增大了其产品在市场的适用性。
•VM视觉图像算法处理性能良好,配合客户高速机械手取料,可以实现7200 pcs/h的高速上料需求。
•VM算法平台标准软件开发,不需要复杂的编程,不需要软件工程师即可完成项目搭建,为企业减少了开发的难度和售后维护成本。
•本视觉方案实现了异形件的全自动上料功能,漏抓率0.1%以下,达到了节拍7200个/小时的自动生产效率。



 突破标签印刷缺陷检测瓶颈,海康机器人推出高效易用型解决方案2026-03-10
突破标签印刷缺陷检测瓶颈,海康机器人推出高效易用型解决方案2026-03-10 【计算成像】超越像素:计算光学与下一代工业视觉系统2026-03-09
【计算成像】超越像素:计算光学与下一代工业视觉系统2026-03-09 读码器TCP通讯配置全解析:从客户端到服务器的实战指南2026-03-09
读码器TCP通讯配置全解析:从客户端到服务器的实战指南2026-03-09
 浙公网安备 33010802013223号
浙公网安备 33010802013223号