一.扇形的绘制
在Window中,HDC是用于绘图的句柄,它和HWND一样。HDC是设备环境专用的绘图句柄。在MFC中封装于CDC类中。
HDC句柄绘图有三种方式,分别为标准客户区绘图、临时客户区绘图和非客户区绘图。因此CDC类绘图也分为三种,与之对应即标准客户区绘图(CPaintDC)、临时客户区绘图(CClientDC)和非客户区绘图(CWindowDC)。
在CDC类中,没有直接提供用于绘制控件要求的扇形,但提供了绘制椭圆弧和直线的接口,即:
BOOL Arc(int x1, int y1, int x2, int y2,
int x3, int y3, int x4, int y4);
BOOL Arc(LPCRECT lpRect, POINT ptStart, POINT ptEnd);
BOOL Polyline( LPPOINT lpPoints, int nCount);
具体使用如下
m_displayDC->Arc(temp->data->maxRectBoundary, temp->data->anglePoint[0], temp->data->anglePoint[2]);
m_displayDC->Arc(temp->data->minRectBoundary, temp->data->anglePoint[1], temp->data->anglePoint[3]);
m_displayDC->Polyline(temp->data->anglePoint, 2);
m_displayDC->Polyline((temp->data->anglePoint + 2), 2);
效果如下
二.点在扇形内的判断
废话不多说,直接上代码
struct S_PIE
{
CPoint center;
CRect maxRectBoundary;
CRect minRectBoundary;
CPoint anglePoint[4];
CPoint maxMiddlePoint;
CPoint minMiddlePoint;
};
struct S_PIEINFO
{
bool isHover;
int listBoxNum;
S_PIEINFO* fNode;
S_PIE* data;
S_PIEINFO* rNode;
};
float getAngleToXPositive(CPoint vector) {
if (vector.x >= 0 && vector.y == 0)
return 0.0f;
else if (vector.x == 0 && vector.y > 0)
return PI / 2;
else if (vector.x == 0 && vector.y < 0)
return PI * 3 / 2;
else if (vector.x < 0 && vector.y == 0)
return PI;
float xita = acos(vector.x / sqrt(pow(vector.x, 2) + pow(vector.y, 2)));
if (vector.y > 0)
return xita;
else
return 2 * PI - xita;
}
bool isInPie(S_PIEINFO* pie, CPoint* currentPoint) {
int maxR = pie->data->maxRectBoundary.right - pie->data->center.x;
int minR = pie->data->minRectBoundary.right - pie->data->center.x;
float r = sqrt(pow(currentPoint->x - pie->data->center.x, 2) + pow(currentPoint->y - pie->data->center.y, 2));
if (r > maxR || r < minR)
return 0;
else {
CPoint startVector(pie->data->anglePoint[0].x- pie->data->center.x, pie->data->anglePoint[0].y - pie->data->center.y);
float startAngle = getAngleToXPositive(startVector);
CPoint endVector(pie->data->anglePoint[2].x - pie->data->center.x, pie->data->anglePoint[2].y - pie->data->center.y);
float endAngle = getAngleToXPositive(endVector);
CPoint cPointVector(currentPoint->x - pie->data->center.x, currentPoint->y - pie->data->center.y);
float cPointAngle = getAngleToXPositive(cPointVector);
if (cPointAngle >= startAngle && cPointAngle <= endAngle || cPointAngle >= endAngle && cPointAngle <= startAngle)
return 1;
}
}
效果如下

三.扇形的夹角调整事件
矩形与多边形的调整大多是线性的,即矩形或多边形某点的改变只需要:*某点(x或y)+= 当前鼠标位置(x或y)- 前一鼠标位置(x或y)*即可实现。
但扇形夹角的调整却无法这么做,扇形的边界点调整需要将鼠标移动的dx,dy转变为边界点绕圆心的角度。
本文提出一种可行的方法,并以C++代码实现这种线性变换。
1.原理
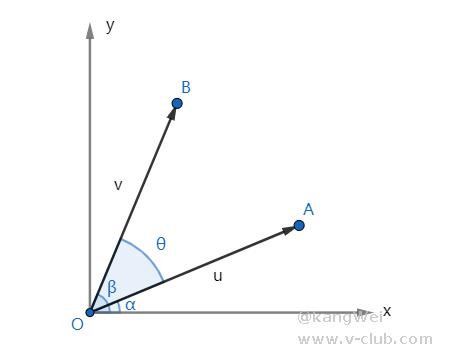
点绕圆心的旋转可理解为点与圆心所成二维向量绕圆心进行旋转。如下图所示,有一向量OA,其模长为r,将其绕O点旋转θ°得到向量OB,则点B的坐标可由点A表示为

写成矩阵形式为

上式θ可由鼠标前后位置与圆心所成向量的夹角变化表示,即如下图dθ所示
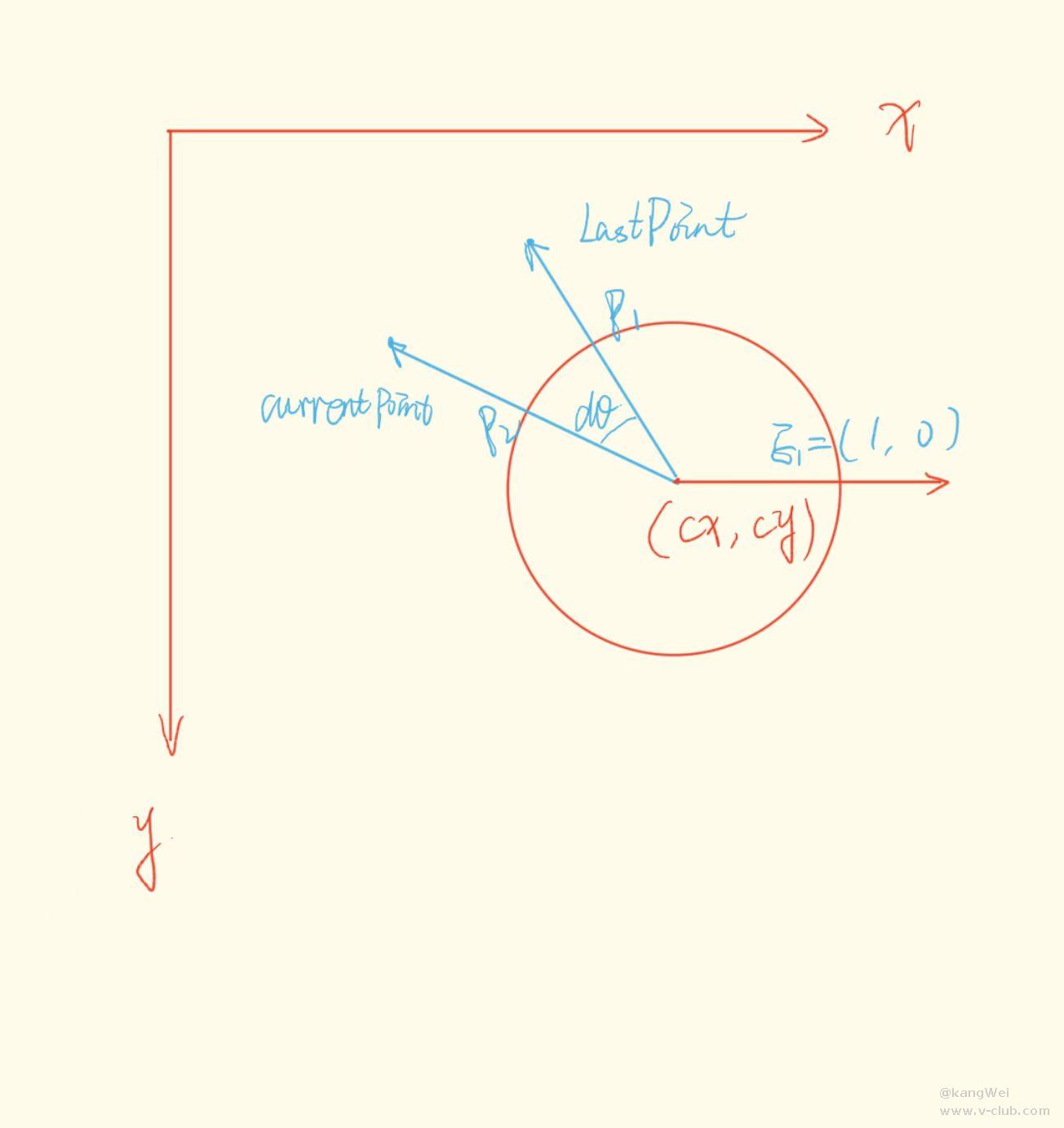
在理想状态,不考虑精度损失的情况下,求出OB向量后,将OB向量加上O点坐标,即可得扇形边界点旋转后的坐标。
但由于CPoint是int型,而旋转过程中计算所用sin、cos函数均为float或double型,存在较大精度损失,故实际转换后的扇形边界点需计算OB向量与圆O的交点,再根据交点的远近,选择离A点最近的交点作为扇形边界点的新值。
2.代码实现
void getCrossLineCircle(double k, double b, CPoint centerPoint, float r, CPoint* returnPoint) {
double a = pow(k, 2) + 1;
double b1 = 2 * (k * b - k * centerPoint.y - centerPoint.x);
double c = pow(centerPoint.x, 2) - (double)r * r + pow(b - centerPoint.y, 2);
double x1 = (-b1 + sqrt(pow(b1, 2) - 4 * a * c)) / 2 / a;
double y1 = k * x1 + b;
double x2 = (-b1 - sqrt(pow(b1, 2) - 4 * a * c)) / 2 / a;
double y2 = k * x2 + b;
returnPoint[0] = CPoint(x1, y1);
returnPoint[1] = CPoint(x2, y2);
}
void transPoint1(double dxita, CPoint* startPoint, CPoint centerPoint, float r) {
CPoint rotatedVec(startPoint->x - centerPoint.x, startPoint->y - centerPoint.y);
double endRotatedVecX = rotatedVec.x * cos(dxita) - rotatedVec.y * sin(dxita);
double endRotatedVecY = rotatedVec.x * sin(dxita) + rotatedVec.y * cos(dxita);
CPoint temp[2];
if (endRotatedVecX == 0) {
temp[0] = CPoint(centerPoint.x, centerPoint.y + r);
temp[1] = CPoint(centerPoint.x, centerPoint.y - r);
}
else if (endRotatedVecY == 0) {
temp[0] = CPoint(centerPoint.x + r, centerPoint.y);
temp[1] = CPoint(centerPoint.x - r, centerPoint.y);
}
else {
double k = endRotatedVecY / endRotatedVecX;
double b = (double)centerPoint.y - k * centerPoint.x;
getCrossLineCircle(k, b, centerPoint, r, temp);
}
if (temp[0].x - startPoint->x >= -r && temp[0].x - startPoint->x <= r && temp[0].y - startPoint->y >= -r && temp[0].y - startPoint->y <= r) {
startPoint->x = temp[0].x;
startPoint->y = temp[0].y;
}
else {
startPoint->x = temp[1].x;
startPoint->y = temp[1].y;
}
return;
}
CPoint startVec(m_lastButtonDownPoint->x - m_pieLink->m_currentHoverNode->data->center.x,
m_lastButtonDownPoint->y - m_pieLink->m_currentHoverNode->data->center.y);
CPoint endVec( currentPoint->x - m_pieLink->m_currentHoverNode->data->center.x,
currentPoint->y - m_pieLink->m_currentHoverNode->data->center.y);
float startxita = getAngleToXPositive(startVec);
float endxita = getAngleToXPositive(endVec);
if (startxita != endxita) {
float dxita = endxita - startxita;
int r1 = m_pieLink->m_currentHoverNode->data->maxRectBoundary.right - m_pieLink->m_currentHoverNode->data->center.x;
transPoint1(dxita, m_pieLink->m_currentHoverNode->data->anglePoint, m_pieLink->m_currentHoverNode->data->center, r1);
int r2 = m_pieLink->m_currentHoverNode->data->minRectBoundary.right - m_pieLink->m_currentHoverNode->data->center.x;
transPoint1(dxita, m_pieLink->m_currentHoverNode->data->anglePoint + 1, m_pieLink->m_currentHoverNode->data->center, r2);
}
3.效果如下
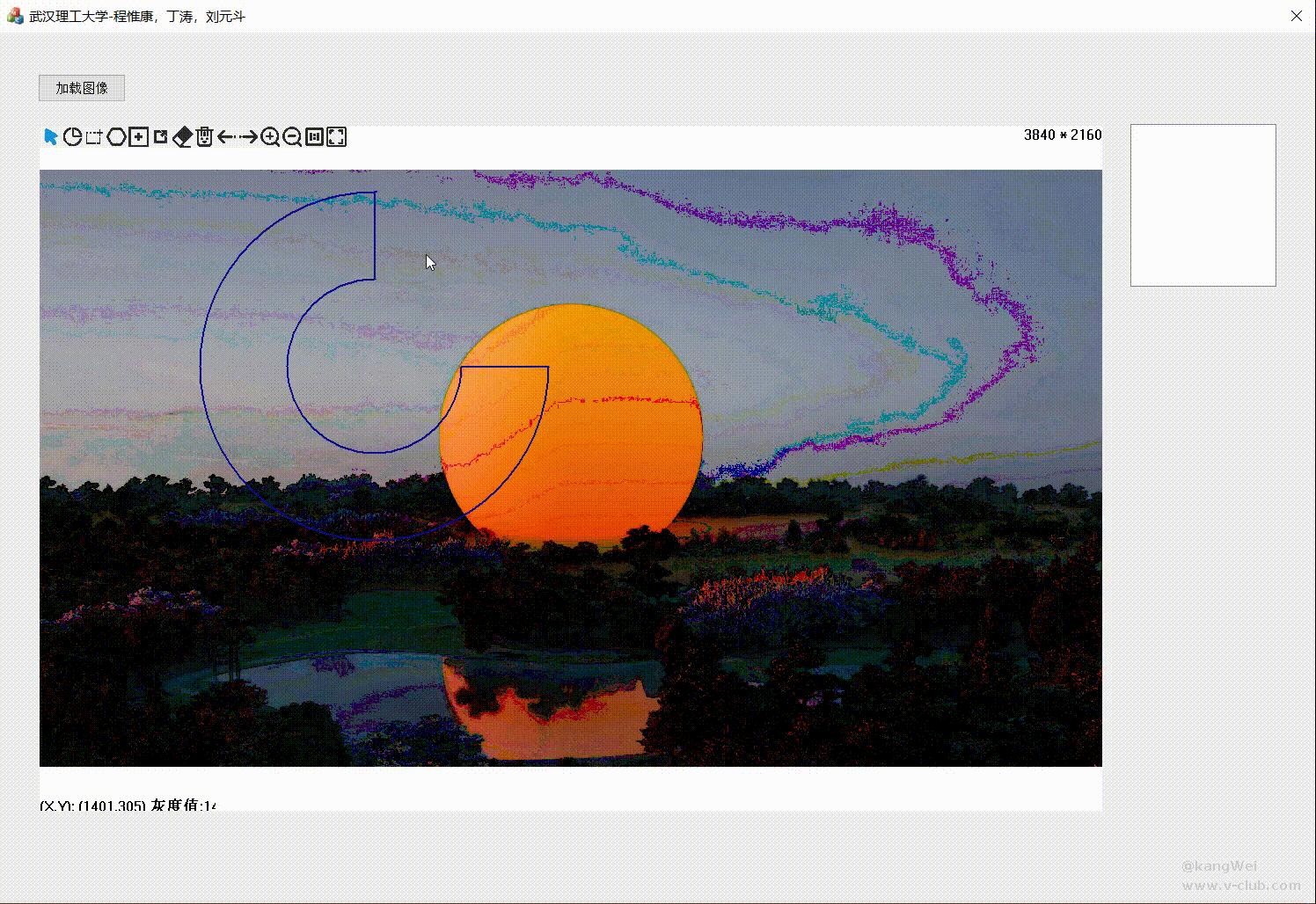
此方法仍旧存在一点小瑕疵,内外圆旋转存在角度偏差,旋转越久,偏差越明显。
四.结语
写博客的次数不多,可能存在许多表述不明、表述有误的地方,欢迎大家批评指正。







 浙公网安备 33010802013223号
浙公网安备 33010802013223号