- 0
- 0
- 分享
- 2023-03-21 14:59
活动简介
“悉灵杯”3D课题研究活动围绕“3D+AI”的主旨,以自主研发的3D相机和AI训练平台为导向,为参赛选手提供免费的软硬件支持和实际的开发应用场景,帮助参赛选手深入了解机器视觉3D开发技术,积累更多专业知识与项目经验。
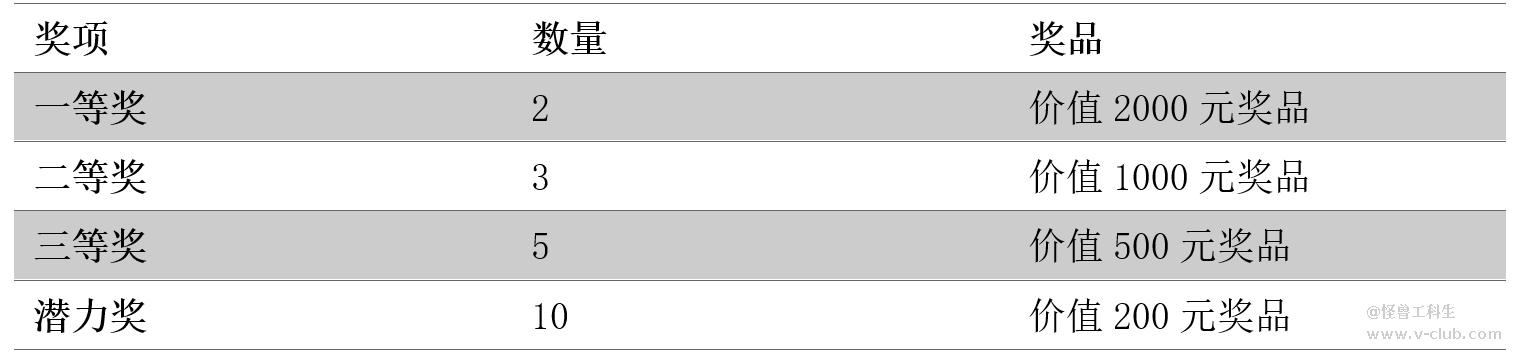
参与本次活动,你将有机会获得海康机器人简历免筛PASS卡、实习机会、MV-EB435i-A立体相机、精美奖品、V社区积分等超多福利,快来报名吧!
奖项设置
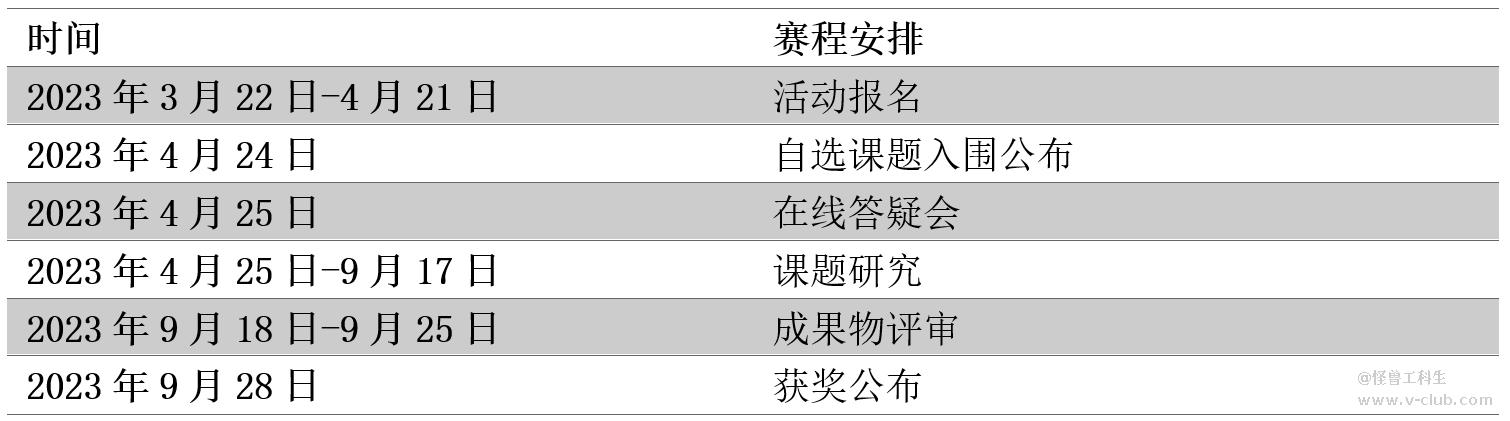
活动安排
活动对象
本次活动面向所有机器视觉爱好者、在校全日制本(专)科生、硕士研究生。
报名方式
报名方式:参赛者需在2023年3月22日-4月21日期间登录V社区帐号进行组队报名(如无帐号,需进行注册),我们将在报名一周内发送报名成功邮件至申报人邮箱,提供软件环境和参赛手册。
报名途径:V社区活动头图-点击报名。
报名要求:
● 每支参赛队伍人数不超过3人,由队长提交1次报名信息即可,其他成员无需重复报名。
● 参赛命题分为指定题目和自选题目两种,每支参赛队只可选择1个命题进行参赛,每名参赛选手只能参加1支参赛队。
课题介绍
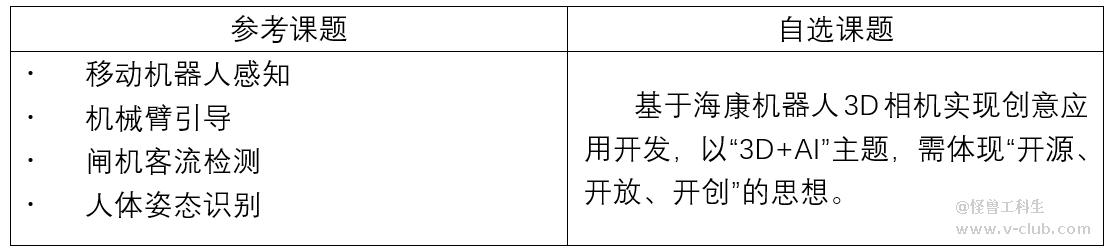
注:自选课题设置入围评审环节,入围后的课题方可开展研究
● 移动机器人感知
海康机器人自研的移动机器人产品采用MV-EB435i-A感知相机已实现实时避障、栈板识别、料箱识别等功能。如何使用3D视觉以及AI识别技术,进一步加强移动机器人的感知能力,使之更加智能化?本课题需要使用海康机器人3D相机赋能机器人(移动机器人种类不限),实现具体可行的感知应用。
● 机械臂引导
3D视觉引导机械臂方案被越来越多的行业认可,如:快递分拣供包、汽车配件上下料、仓储拆码垛、仓配货品拣选。本课题需要使用海康机器人3D相机产品获取视野中多个无序摆放物品的抓取点位与抓取顺序,物品种类不限。最终成果物如能搭配机械臂实现抓取动作更佳,仅呈现视觉方案亦可。
● 客流检测
在部分关键通道场景如地铁闸机,使用3D视觉可实现流量统计、尾随报警、异常行为报警等功能。本课题需要使用海康机器人3D相机产品,通过对深度和RGB图像数据的分析,实现一个区域内的客流检测相关功能。
● 人体姿态识别
人体姿态估计是计算机视觉的基础任务之一,它在人体动作识别、行为分析、人机交互等方面有着广阔的应用前景。本课题需要使用海康机器人3D相机产品的RGB和深度信息,并采用深度学习辅助提升精度,最终实现高精度低延迟的人体姿态识别方案。
成果物要求
● 成果物一:最终成果物需提交研究报告发布至V社区,报告包含开发思路、代码(第三方)、运行结果等。
● 成果物二:开源代码请自行上传至gitub或者gitee 平台,开源许可证(License)选择 MIT License
● 成果物三:研究期间可根据团队研究进度在V社区RGB-D专区发布2篇或以上进度分享文章,并通过分享获得更多阅读量、点赞量及话题度,评委将根据分享文章质量、大众评审喜爱度对最终成果物进行综合考评。
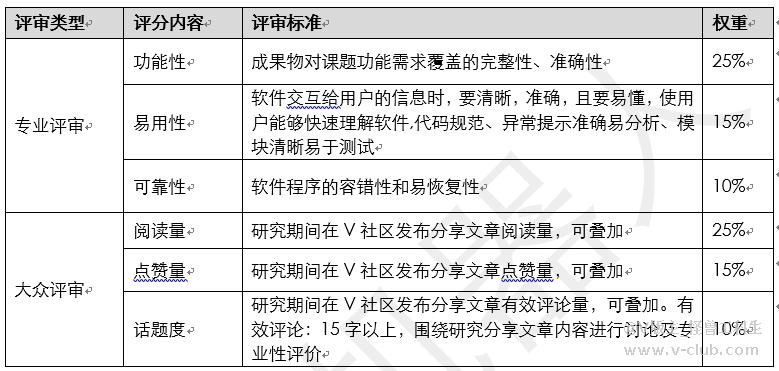
评审标准
考核维度:专业评审+大众评审
评委组成:业内资深3D视觉应用专家、知名高校老师、海康机器人技术专家、V社区用户
评分标准:
咨询通道
通道一:进入V社区点击“我要提问”!你的疑问,我来解答
通道二:扫描二维码加入大赛咨询QQ交流群,了解大赛更多信息

QQ交流群号:471076724
资料获取
相机获取:产品借用协议将在报名后与报名成功通知一起发送至申请人邮箱,签署并回传借用协议即可获取相机。
参考资料:
● MV-EB435i-A相机:一款小体积、配置全面的双目感知立体相机,凭借硬件级的深度图像处理方案,可高速同步输出深度图及彩色图。产品介绍、技术规格书、SDK开发指南、SDK包等资料请见V社区
● MV-DB500S-A相机:采用主动双目立体成像技术,结合彩色摄像头输出高帧率RGB-D 图像,并内置深度学习算法。产品介绍、技术规格书、用户手册等,请见官网
● 3DMVS_V2.1.0客户端:配置3D相机参数,预览相机图像,升级固件以及导入导出深度学习模型,请到官网下载
Q&A
答:选择课题1,3,4邮寄MV-EB435i-A相机;选择课题2邮寄MV-DB500S-A相机;
本次大赛成果物需保证原创性,不得违反任何中华人民共和国有关法律,不得侵犯任何第三方知识产权或者其他权利。大赛最终成果物知识产权归海康机器人所有。
本大赛最终解释权归杭州海康机器人股份有限公司所有。


 智能日志分析助手上线了!2026-03-19
智能日志分析助手上线了!2026-03-19 【技术分享】VM实现状态机2026-04-17
【技术分享】VM实现状态机2026-04-17 VisionMaster4.4(官网最新版)BUG--运行界面设计时,控件无法复制粘贴2026-04-16
VisionMaster4.4(官网最新版)BUG--运行界面设计时,控件无法复制粘贴2026-04-16- 诚邀参会|2026年4C智能工业视觉检测专项挑战赛(本科+高职)线上启动会,邀您共启新程!2026-03-20
 RAD(Retrieval-basedAnomalyDetection,基于检索的异常检测)2026-04-01
RAD(Retrieval-basedAnomalyDetection,基于检索的异常检测)2026-04-01
 浙公网安备 33010802013223号
浙公网安备 33010802013223号