应用案例|3C行业–编带机定位引导抓取项目
- 0
- 0
- 分享
- 2023-03-22 20:53
客户属于3C编带机行业,该设备主要用于零部件封装工序。把3C零部件判断正反后,进行定位吸取,放置进编带机里面进行封装,供给后面的工序把编带拆开再进行组装贴合。
一、案例背景
(1) 项目需求
客户是非标设备商,主要做编带机行业设备,项目周期较短,考虑使用VM算法平台进行二次开发使用。
项目需求:
- 定位精度要求在正负0.5mm
- 区分来料正反并提供正料的XY和角度信息
- 一次检测20个料,节拍要求在500ms内完成定位结果输出
(2) 项目痛点
- 客户交付周期较短,项目开发时间需要三天内完成交付。
- 用户上料件属于非标,需要支持在线切换模板和方案。
二、方案描述
(1)配单表

(2)方案示意图
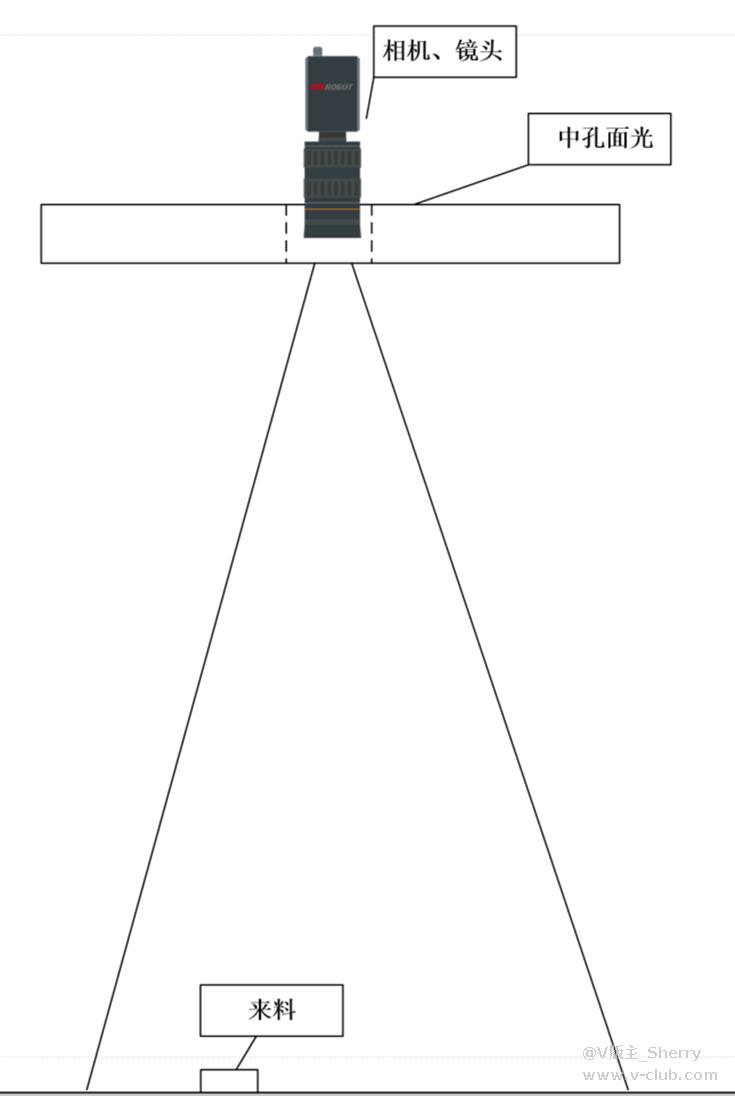
三、搭建与调试
1.硬件设备搭建

2.项目难点:
- 一次性匹配20多个来料并进行正反面判断和定位,时间控制在500ms内。
- 机械手末端是带六个吸嘴进行定位吸取,数据发送需要分好区域,避免出现吸嘴行程不够导致无法吸取。
- 标定过程如果吸嘴带动物体,会存在视野遮挡,导致无法标定,且末端有6个吸嘴。
3.软件调试方案
- 方案标定采用点触的方式,客户直接输入像素坐标和物理像素,通过9点标定工具进行生成标定文件。解决视野遮挡导致无法标定问题。

- 通过配置循环Group组模块进行检测。循环检测定位,再进行集中输出,解决时间控制和方案调试快捷问题。
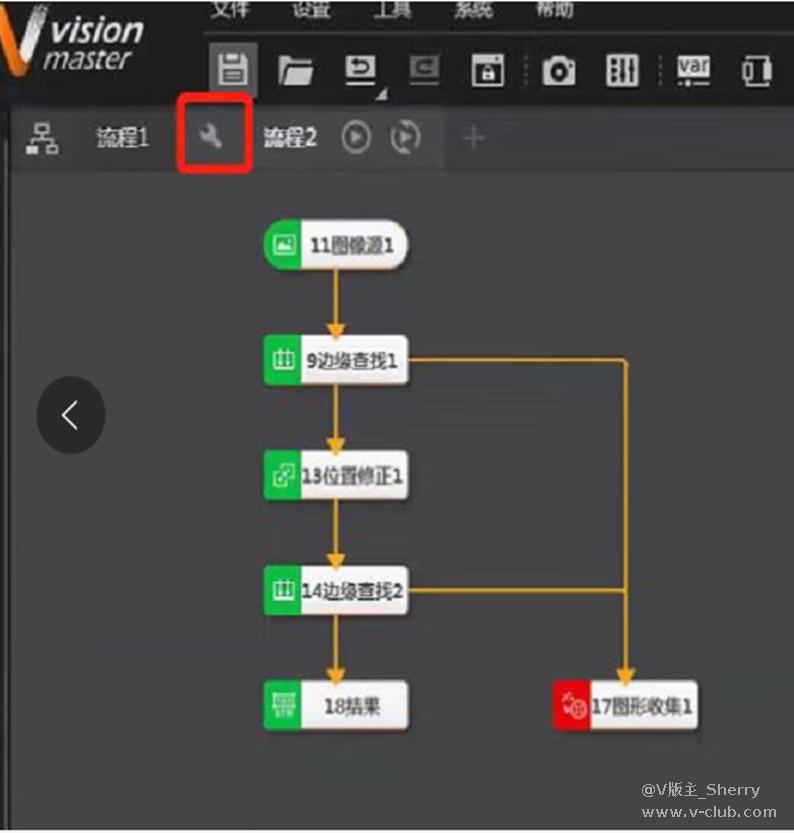
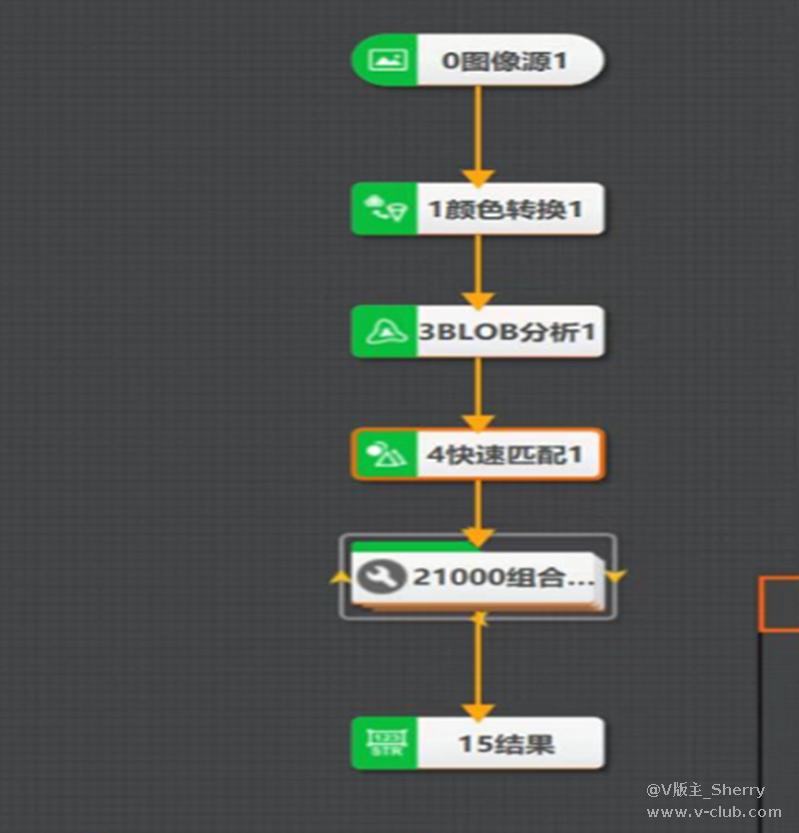
- 通过脚本处理模块,对获取的数据X坐标进行分区,分三段区域进行顺序输出,左边区域负责左边两个吸嘴行程,中间区域负责中间两个吸嘴行程,右边区域负责右边两个吸嘴的行程。解决六个吸嘴的行程吸取问题。

- 整体图像效果好,定位精度达0.2mm,满足客户正负0.5mm需求。
三、项目优势
- 本视觉方案流程开发简练,可快速切换方案以及在线更新来料模板,示教矫正标定简单,满足客户实际快速生产要求。
- 本方案有效解决客户了痛点问题,开发周期短,成为客户最佳性价比方案。
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。

评论请先登录 登录
全部评论 0


相关阅读
 叉车效率优化2025-11-28
叉车效率优化2025-11-28- 细化梯度2025-11-26
- 任务编排之循环任务2025-11-05
- 移动机器人技术分享-25年11月2025-11-14
 【2D算法系列】基于投影分析的字符分割算法实现详解2025-11-11
【2D算法系列】基于投影分析的字符分割算法实现详解2025-11-11
 浙公网安备 33010802013223号
浙公网安备 33010802013223号