- 0
- 2
- 分享
- 2023-03-31 09:45
一、配置 ROS 系统
1、 配置 ROS 镜像源
1.1、命令行配置相关依赖环境
本文以 Ubuntu18.04 ROS Melodic 版本为例,在 ROS 系统中对海康机器人 SDK 进行相关调用和使用。
首先需要配置 ROS 系统的镜像源,以下命令是对使用该系统的依赖环境的设置。

1.2、下载安装 ROS 系统
在 ubuntu 系统下使用 ROS 系统,是要对 ROS 系统重新下载并在 ubuntu 系统下进行重新下载安装并配置,此处对 ROS 系统进行了重新下载

等该命令运行完成,ROS 系统即配置完成
二、在 ROS 系统上运行海康机器人 SDK 配置
1、在 ubuntu 系统上安装海康机器人 SDK
1.1、下载海康机器人 SDK
在使用海康机器人 SDK 过程中,需要根据当前系统版本选择安装相对应的海康机器人 SDK,海康机器人 SDK可以从海康机器人官网进行下载
1.2、安装海康机器人 SDK
将下载好的海康机器人 SDK 解压后打开,运行安装脚本,如下:

有如下返回,即表明海康机器人 SDK 已经安装成功。
2、在 ROS 系统中配置海康机器人 SDK
2.1、在 ROS 系统中配置 GrabImage 程序包
创建 GrabImage 程序包,代码如下:

以上代码中,创建了包名,并指定了依赖包。
在程序包文件目录下需要创建 demo 程序,为了简化流程,可以直接拷贝安装目录下的例程,需要逐一在命令
行中敲入以下代码:

以上代码中,将已经在 ubuntu 系统上安装海康机器人 SDK 中的 GrabImage 程序拷贝到了 ROS 的使用目录下。
2.2、在 ROS 系统中配置 GrabImage 程序的编译脚本
在 ROS 系统下使用海康机器人的 GrabImage 程序,需要重新配置编译该程序的脚本,首先需要建立一个 txt 文
件,用以保存运行脚本,使用如下命令行创建

创建好编译脚本 CMakeLists.txt 之后,需要在该脚本中添加编译 GrabImage 程序的内容,如下:
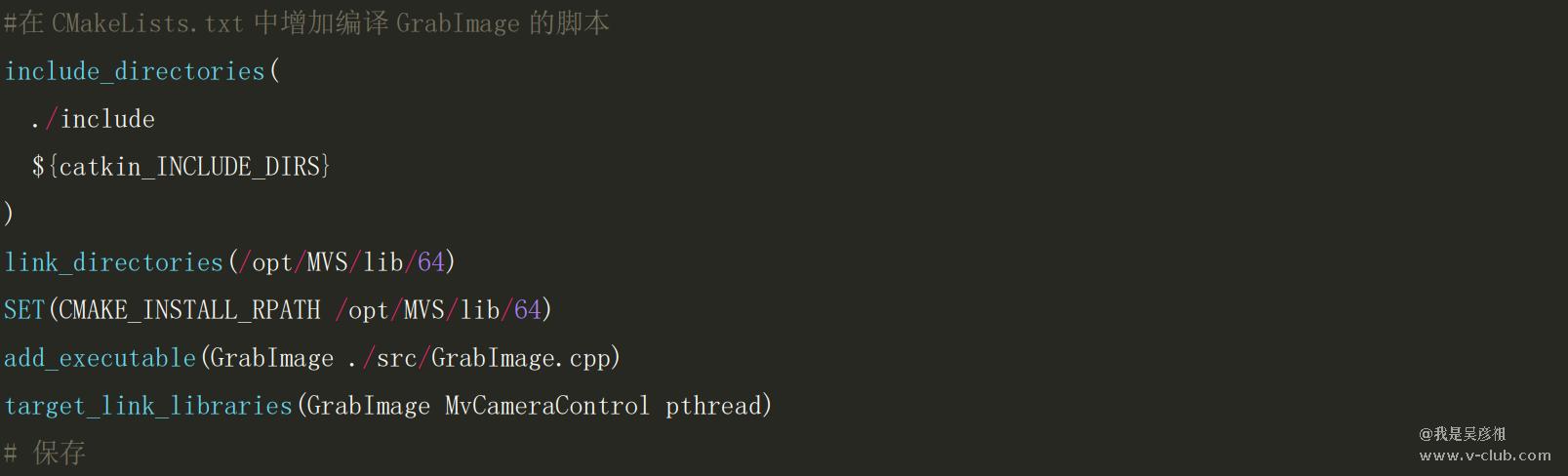
以上内容保存后,即已经将运行 GrabImage 程序的编译脚本完成。
2.3、在 ROS 系统中编译并运行海康机器人 SDK 中的 GranImage 程序
接下来就要在 ROS 系统中运行 GrabImage 程序,首选需要对 GramImage 程序进行编译,编译命令如下:

在编译之后需要注册已经编译好的可执行文件并运行,需要在命令行控制台中运行如下命令:

然后需要在已经运行了 roscore 命令的命令行中重新开启一个命令行控制台,并运行如下代码:

至此,在 ROS 系统中使用海康机器人 SDK 即已成功,只需要在该代码中对海康工业相机进行下一步操作即可。


- 1

 【形状匹配算法系列】从NCC到轮廓匹配:工业视觉的"定位之争",到底争的是什么?2026-05-19
【形状匹配算法系列】从NCC到轮廓匹配:工业视觉的"定位之争",到底争的是什么?2026-05-19 【技术分享】VM运行界面之清空图像2026-06-10
【技术分享】VM运行界面之清空图像2026-06-10 使用VM算法识别屏幕2026-06-05
使用VM算法识别屏幕2026-06-05 认证刷题与模拟考试系统2026-06-12
认证刷题与模拟考试系统2026-06-12- 移动机器人工程师培训与认证安排-26年6月2026-05-18