- 0
- 0
- 分享
- 2023-04-15 11:42
一、案例背景
(1)项目需求
1.发送副屏、中框中心点给PLC。
2.PLC端计算并引导机构根据中框的姿态修正副屏的姿态,完成副屏和中框的贴合。
(2)项目痛点
客户之前采用其他软件自带的视觉模块提取中框的边缘不稳定,计算的中框中心点有偏差,导致会出现副屏压框,贴合不准的情况。
二、方案描述
(1)项目配单表

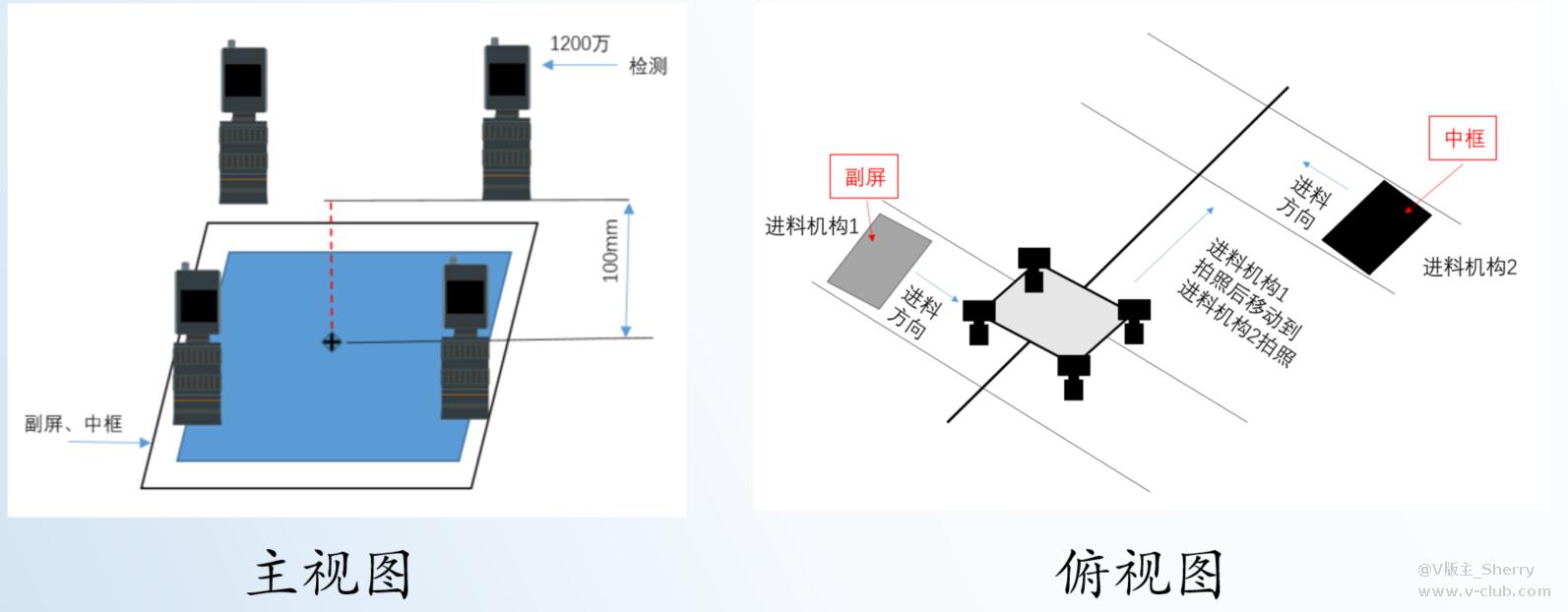
(2)方案示意图
 (3)方案搭建与调试
(3)方案搭建与调试
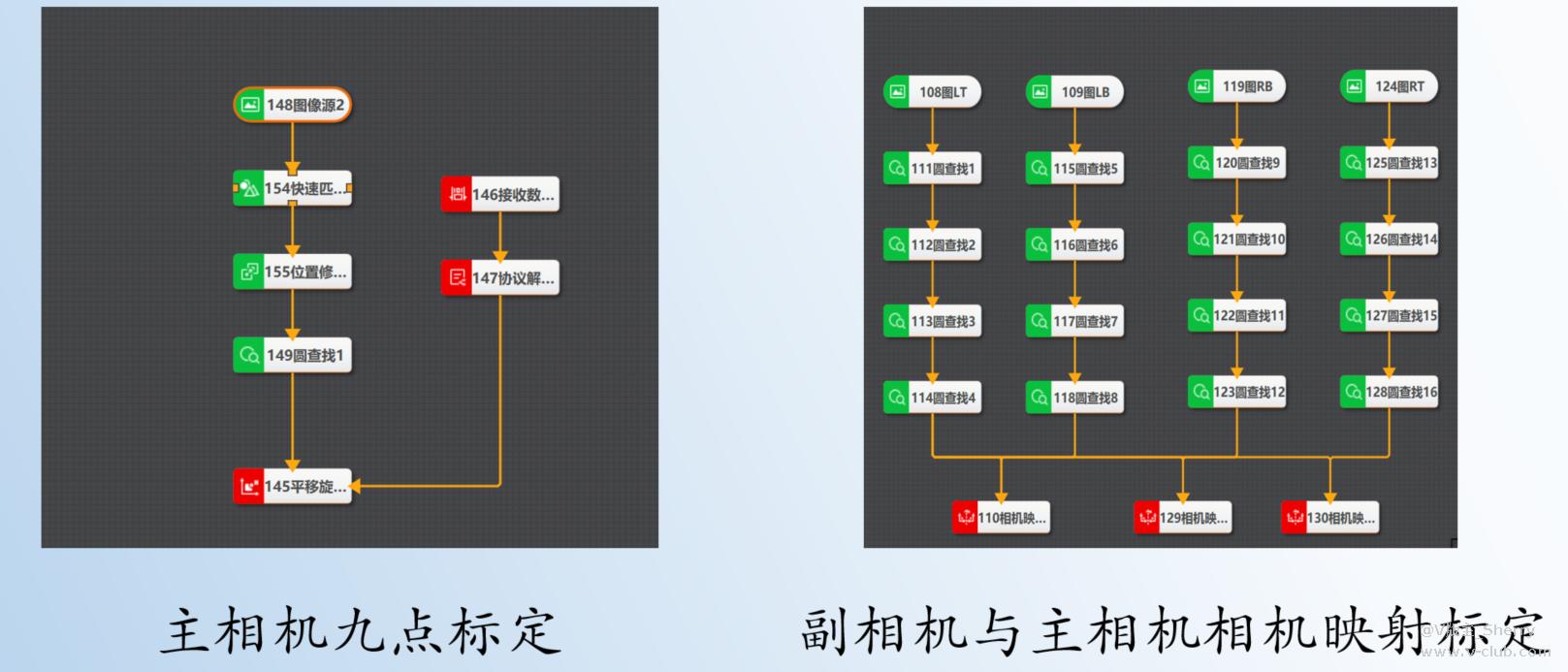
1.标定流程:
采用主相机九点标定+三个副相机与主相机进行相机映射的方案:将所有图像坐标系统一到主相机的图像坐标系,再通过标定转换和记录的移动距离得到四个相机中的点对应的物理坐标。
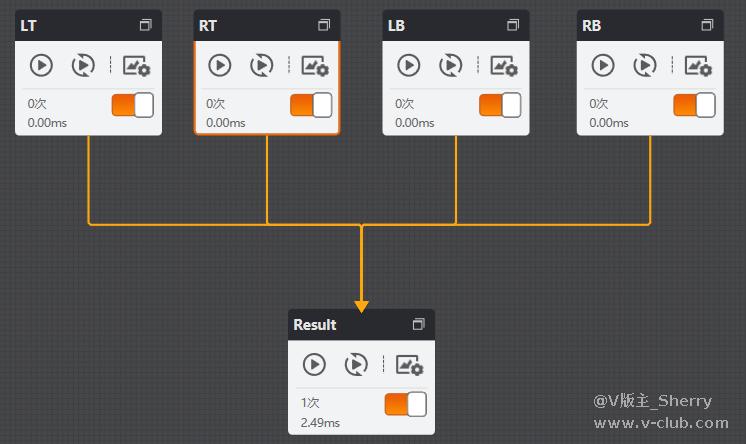
2.总运行方案:
四个相机运行流程分别检测拍摄并检测副屏和中框的四个角点,输出给最终的结果计算流程计算相应的物理坐标值发送给PLC。
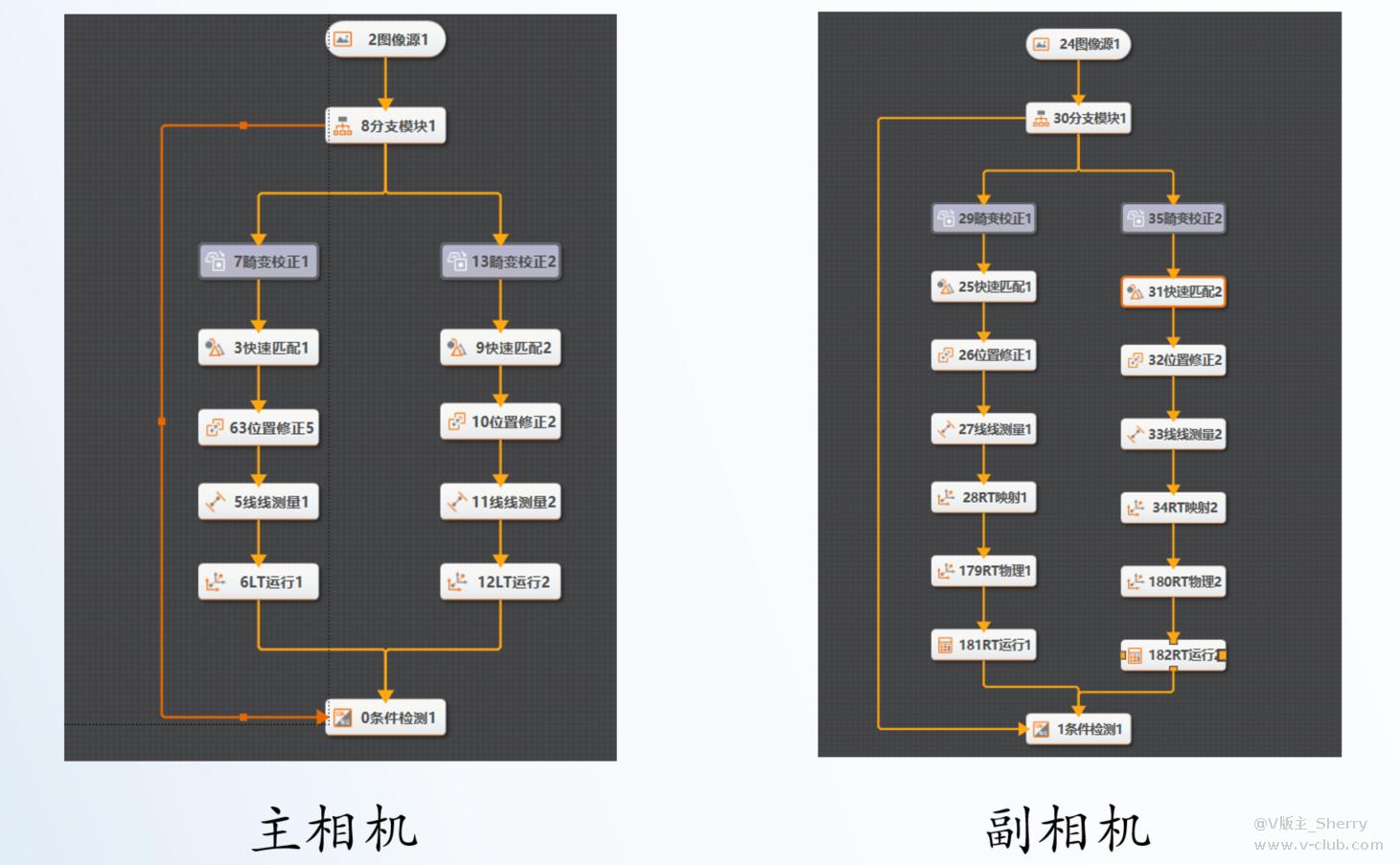
3.各相机运行方案:
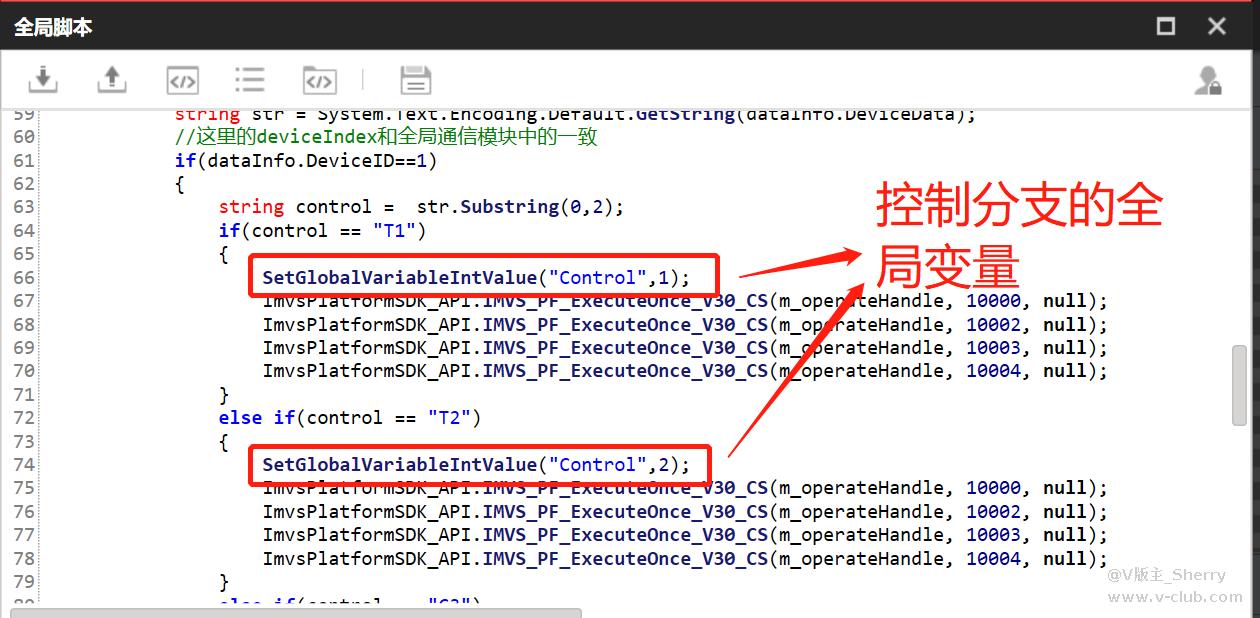
1.主相机:PLC发送指令,控制分支执行检测中框角点或检测副屏角点,输出检测的角点和是否检测完成信号。
2.副相机:与主相机运行方案类似,但增加相机映射和物理计算。
4.结果计算运行方案:
1.根据接收的四个相机运行方案是否检测完成信号,判断是否可以进行计算。
2.若可计算时,根据PLC发送指令控制分支计算中框或副屏的中心物理坐标,将相应的数据和结果通过脚本转换为约定好的字符串发送给PLC。

项目难点1:
拍摄中框和副屏的为同一个相机,需要在同一个流程中区别当前拍摄的是中框还是副屏并进行对应的检测。
解决方案:
通过全局通信脚本接收PLC发送的字符串并根据字符串改变一个的全局变量的值。分支模块订阅该全局变量,执行对应的分支。
项目难点2:
解决方案:
利用线线测量,设置参数边缘类型为最强,边缘极性为从黑到白,完成中框的边缘查找和角点计算。
项目难点3:
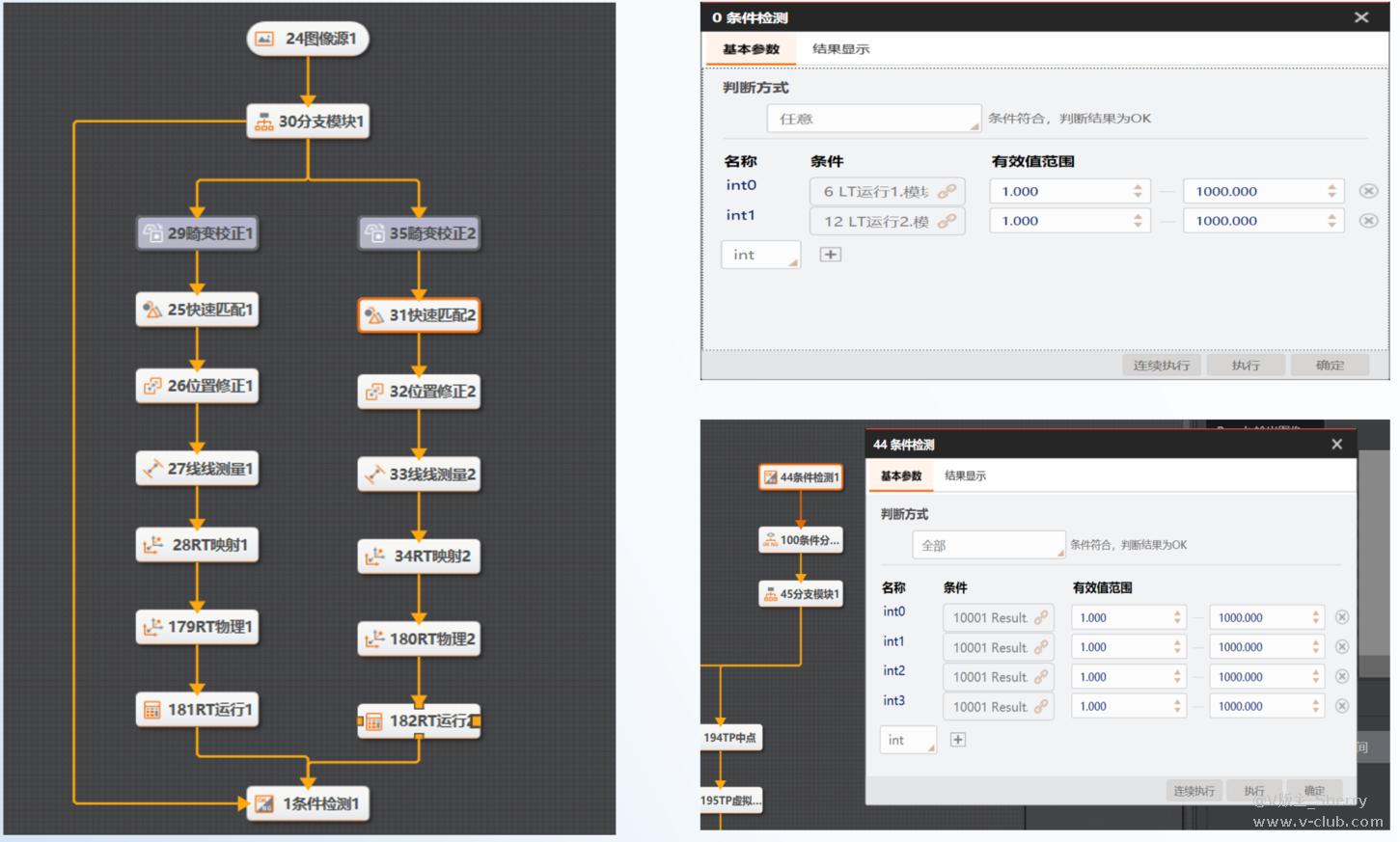
判断四个相机的角点都计算完成后,才可进行相应的中点计算。
解决方案:
1.在每个相机运行方案最后用条件检测模块,检测标定转换的模块状态,判断是否检测完成。
2.将分支模块和条件检测模块直接相连,确保条件检测一定会输出结果。
3.在结果计算流程中判断四个是否完成检测信号是否都为1,如果都为1才进行计算。
三、方案优势
2.帮助客户稳定地检测中框边缘,使得计算的中框中点稳定,提高了中框副屏对位贴合的稳定性和良率。



 现场运维异常处理手册2025-04-02
现场运维异常处理手册2025-04-02 海康移动机器人实施运维工程师认证资料目录2025-04-15
海康移动机器人实施运维工程师认证资料目录2025-04-15 【VM实现Halcon例程】光度立体法缺陷检测2025-04-17
【VM实现Halcon例程】光度立体法缺陷检测2025-04-17- 关节机器人防护分类分享2025-04-15
 浙公网安备 33010802013223号
浙公网安备 33010802013223号