- 0
- 0
- 分享
- 2023-05-04 11:55
1. SLAM建图关键项
1.1 反光条与反光柱规格

关键点:
- 在一个项目上,反光条和反光柱可以混用,但反光柱可以多角度识别,定位效果较好。
- 在一些环境狭窄、高反光环境下(风淋门内,前后开门的电梯内等)建议粘贴反光柱或T型反光板(后续推出),不要使用反光条。
- 高反光环境即使贴磨砂贴纸,但还是建议检查定位回放,如果误识别反光点,需要调整xml→slam_conf参数中反光柱强度阈值intensity_thd;
- 库区栈板物料上的缠绕膜很容易被误识别为反光点,需要调整xml → slam_conf参数中反光柱强度阈值intensity_thd;
1.2 反光条安装规范

安装规范:
- 反光条长度:50cm以上
- 安装高度:中间区域与激光高度平齐
- 反光条之间最小距离:大于1500mm
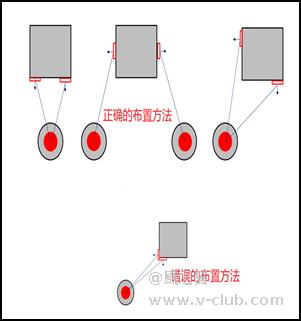
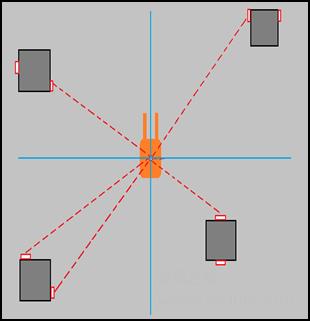
分布原则:
- 以激光头为中心建立坐标系,每个象限须至少识别一根反光条
- 以叉取机器人激光为中心,20m范围内,具备5根有效反光条
- 只有2或者3个象限有反光条时,反光条数量≥6根
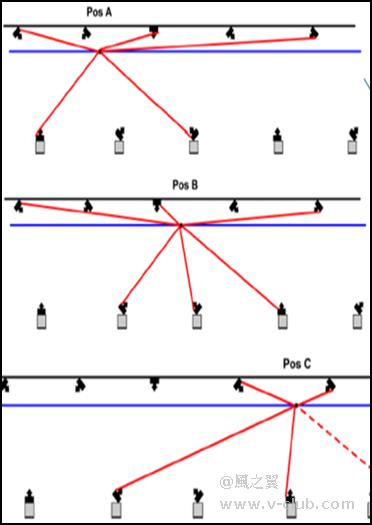
注意事项:
- 反光条不能粘贴在凹凸、起伏处;以及玻璃、不锈钢、消防柜等高反物体附近
- 反光条被遮挡时应增加数量,满足激光观测最低要求
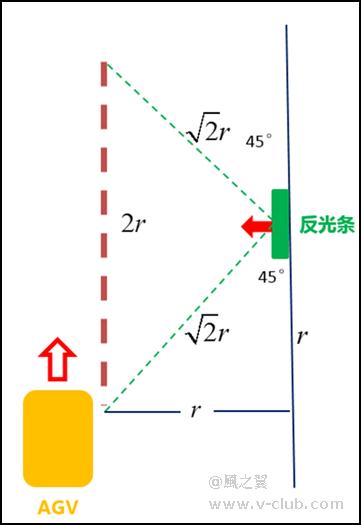
- 注意激光的入射角度,多角度混合安装
- 避免对称安装
1.3 SLAM扫图/建图
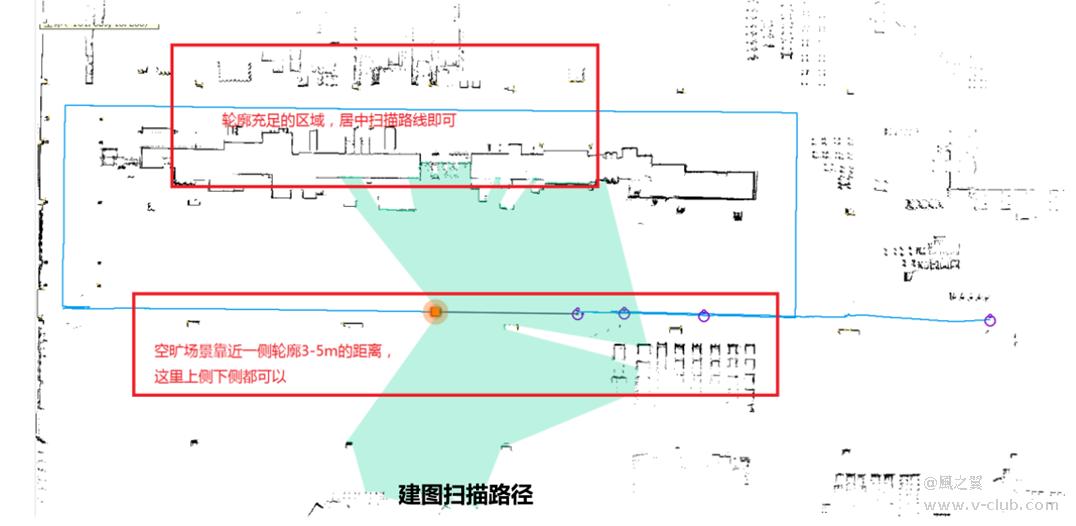
1.3.1 空旷场景的扫图路径
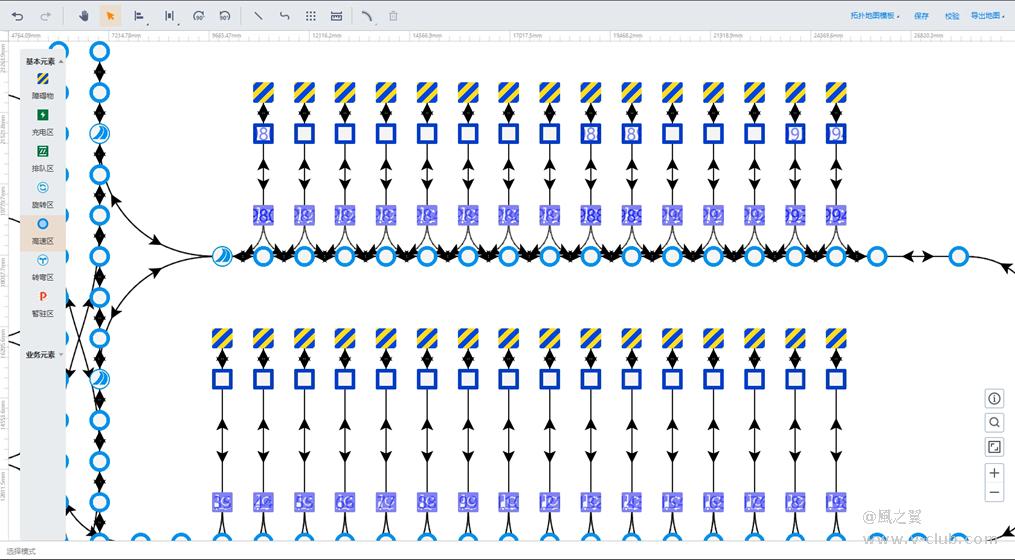
激光slam 建图推荐使用在线模式(人工导航建图), 在建图的过程中能够把扫描的区域生成地图; 对于一般轮廓充足的场景,激光扫描的 5-10m 范围内有很多物体, 从道路的中间扫描即可。
u对于环境空旷的场景(比如两侧距离约 20m 了),这时推荐靠近一边约 3-5m 的距离,沿着一边扫描。 如图,上面的红色框,线路居中; 下侧的红色框,选择了靠近一侧。
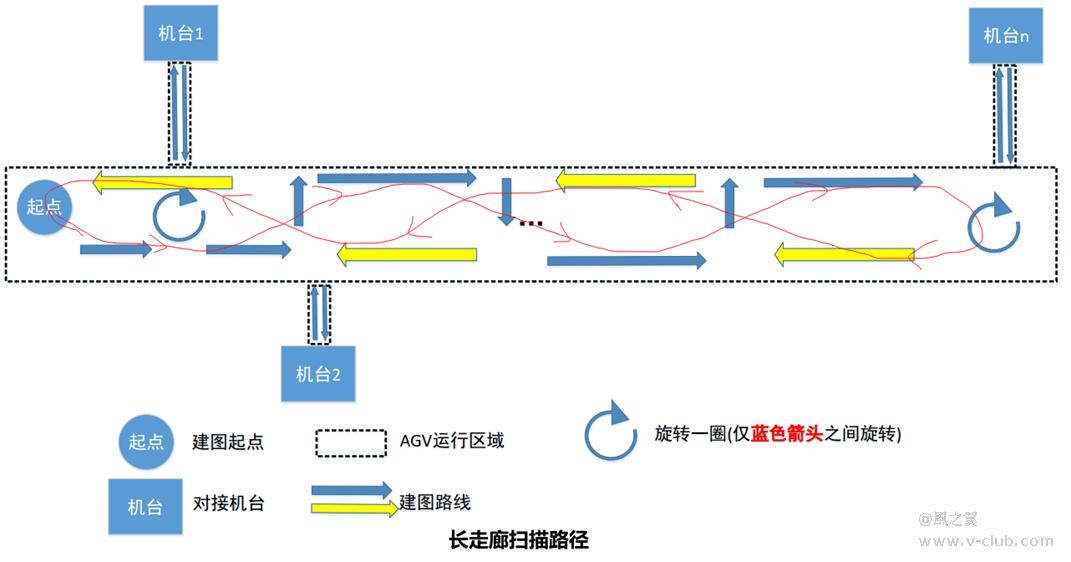
1.3.2 长通道场景的扫图路径
关于扫图路线,对于开放场景,如走廊,若宽度小于8m,则直接往返扫,不用转圈,如下图所示。
若宽度大于8m,很宽,则可以绕“口”字型。因激光扫描最远距离 30 到 40m,因此建议闭环以 40*40m 最好,但具体情况还是要根据现场环境判断。
1.3.3 又长又宽场景的扫图路径
对于现场环境尺寸小于 40m*40m 的场景,扫图按照一圈“口” 字型闭环就行。对于尺寸在100m* 100m 以内的场景,如图所示,
如果中间有路径可以走,可以按照“8”字型扫图、或者两个“口”字型,或者直接一个口字型。
对于更大的场景,则需要按照尺寸、区域进行划分,分割成若干个 100m*100m 或40*40m,然后一块一块的递增,按照口字型扫描,通过连接的“口”字闭环保证地图一致性。
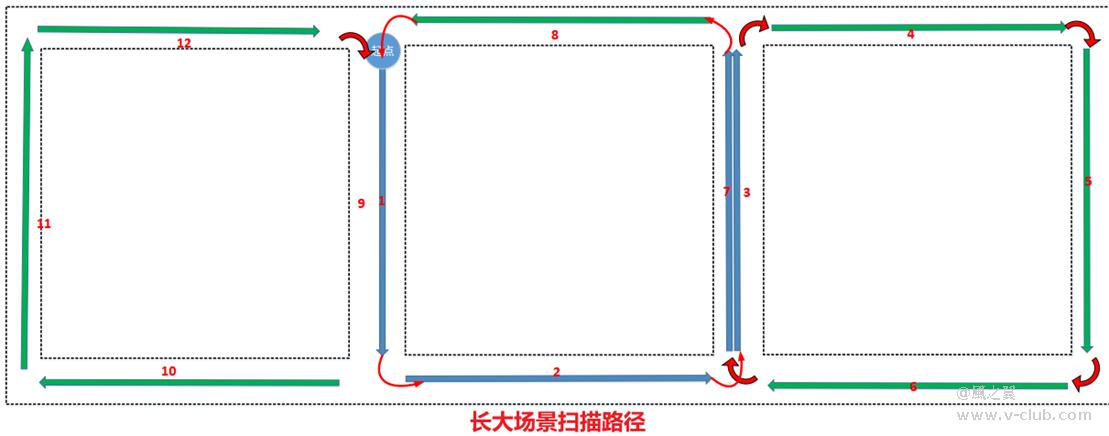
关键点:
建议里程计累计100米左右要有一个闭环。
1.3.4 关于扫图闭环
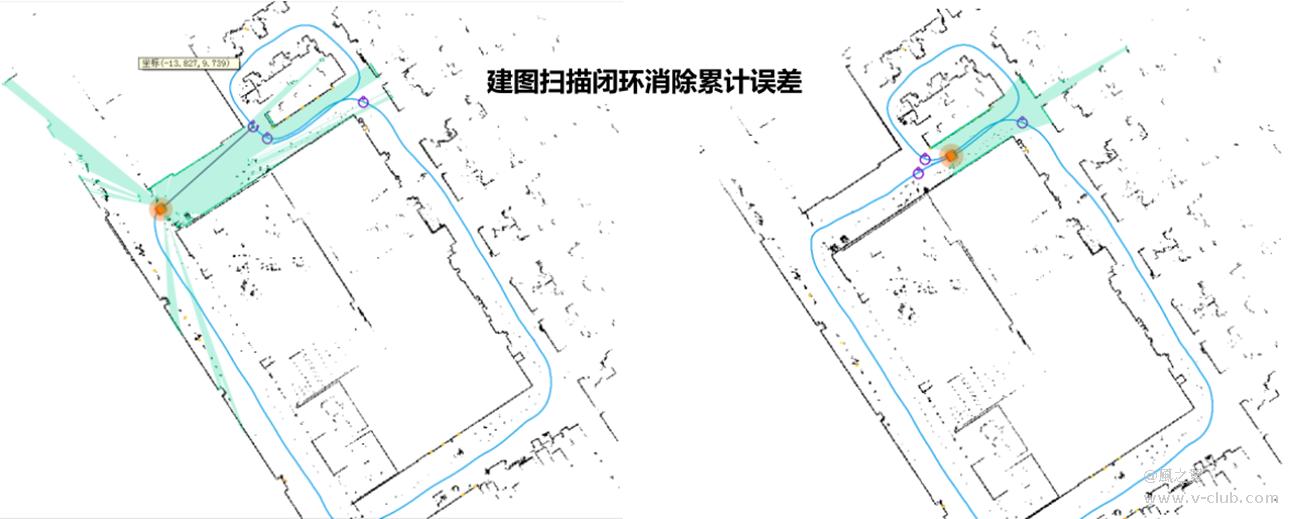
随着扫图的范围逐渐增加,激光的位置会累积出误差,如图 3.3 左图,快要扫描一圈时,会出现闭环提示(箭头指向一个没有闭合的圆圈),指示可以走到闭环提示点消除累积误差,右图表示生成了闭环(生成了一个闭合的圆圈)。 为了保证闭环的稳定,最好在沿着之前走过的路径往前走一段,约 3-5m 即可。
关于闭环,在线建图的时候,能够看到闭环点提示和生成的闭环点,当走到一个口子的时候,留意是否生成闭环点,这时扫图可以慢一点,等生成了闭环点后,就可以继续快速扫图了。
1.3.5 关于扫图时遥控速度
扫图时,推荐 AMR 的速度在0.5-0.75m/s,当走过闭环路口时,适当降低速度到0.3m/s,看到闭环提示后,可以恢复0.7m/s;旋转时速度要慢,不超过45°/s,不要原地旋转,尽量按半径 1m 的圆做弧线运动。不要急加速,导致车轮打滑。
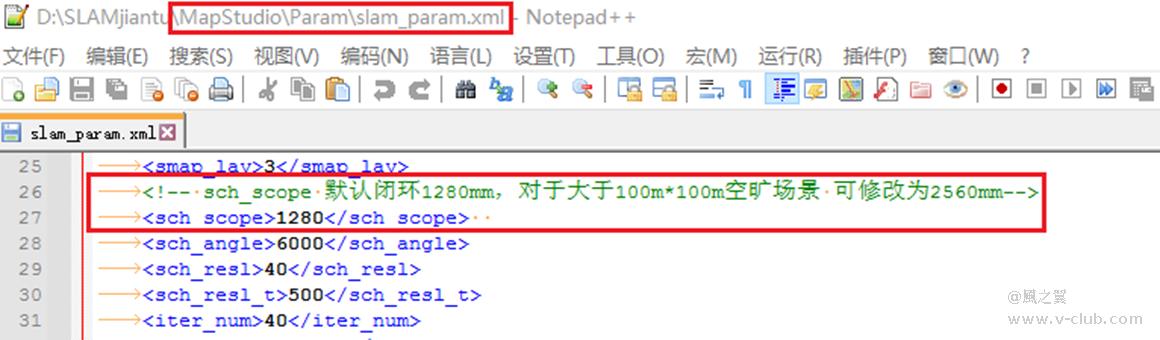
为了便于生成闭环,在扫图时尽量按照标识扫图,比如路面上的色带、图案标记。因为闭环是有推荐范围的,默认参数如图所示,表示只搜索 1280mm 内。 搜索范围变大会带来隐患,闭环搜索对重复场景会出现搜索错误等情况,因此默认 1280mm,对于工厂出现大于100m*100m 空旷环境圈,可修改为 2560mm。
补充:
4.0之前主控离线建图,建图前清空slam_data,扫完图后敲 castor_cli –R 93 刷新下slam_data再下载;
4.0之后主控无需刷新指令,下载lidar数据。
2. AGV类型参数配置
关键项:
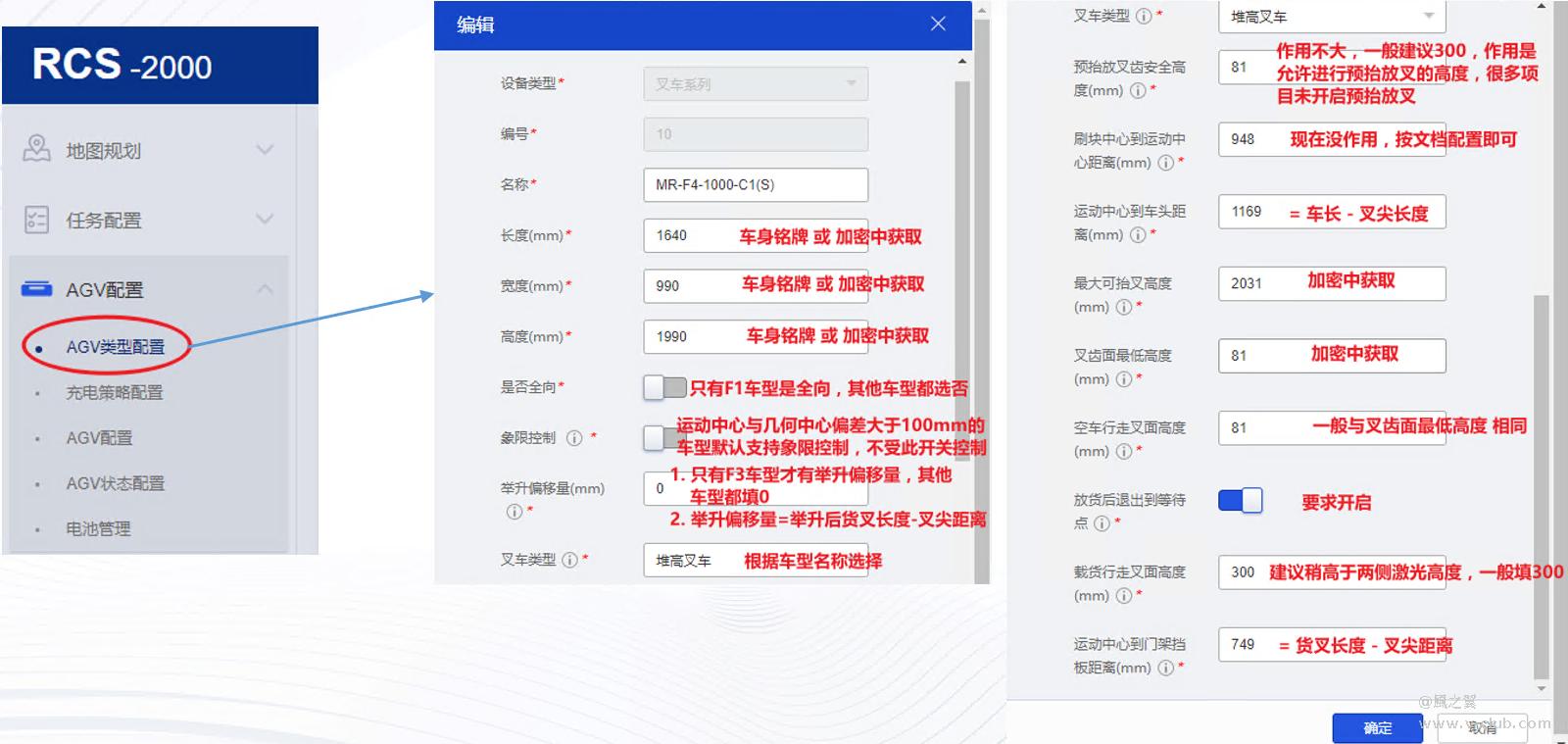
填写参数一定要下载加密,从加密中获取各项尺寸参数,不能照搬实施文档或自己用尺子测量填写;
后续产品端考虑Robox工具可读取这些参数,在工具改版之前要从加密中获取。
3. 能力集配置
3.1 关于偏移
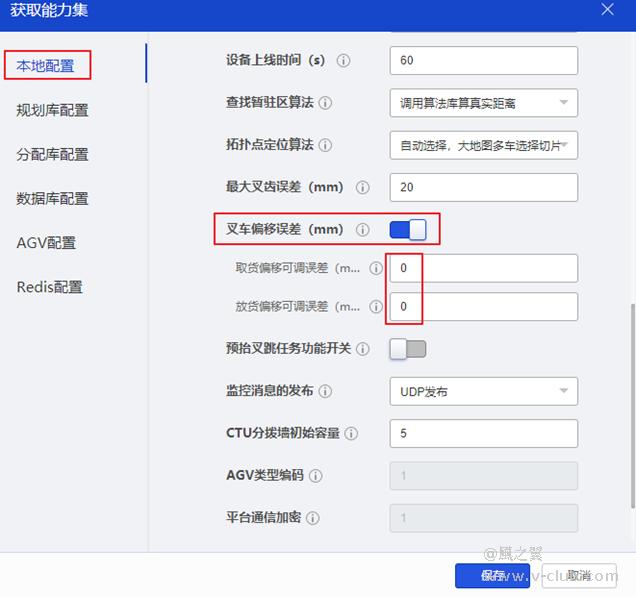
rcs能力集 → 本地配置 → 叉车偏移误差需要打开,这个要跟储位/工作台坐标计算配合使用;
开启叉车偏移作用是为了兼容有多种容器的情况。
3.2 关于精度
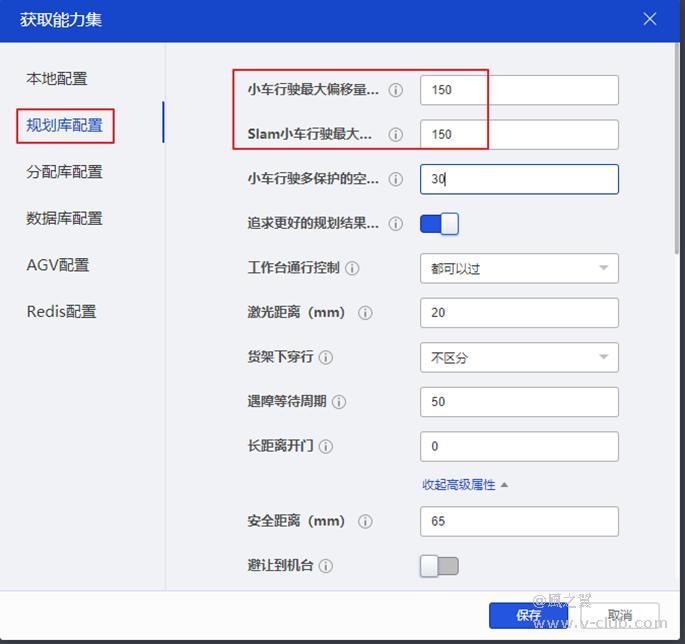
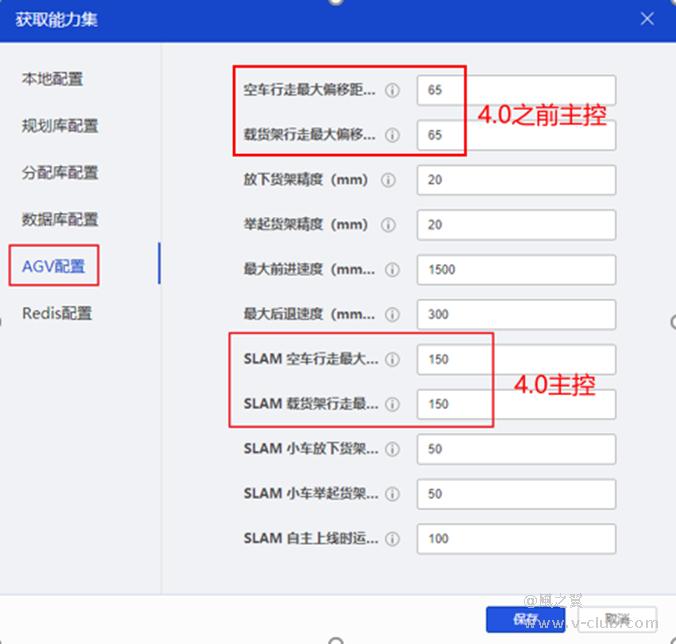
规划库配置中的 Slam 小车行驶最大偏移量与 AGV配置中的空车\载货最大偏移(4.0之前主控), SLAM 空车\载货最大偏差(4.0)要一致。
4. 关于画拓扑地图
4.1 储位/工作区坐标确认
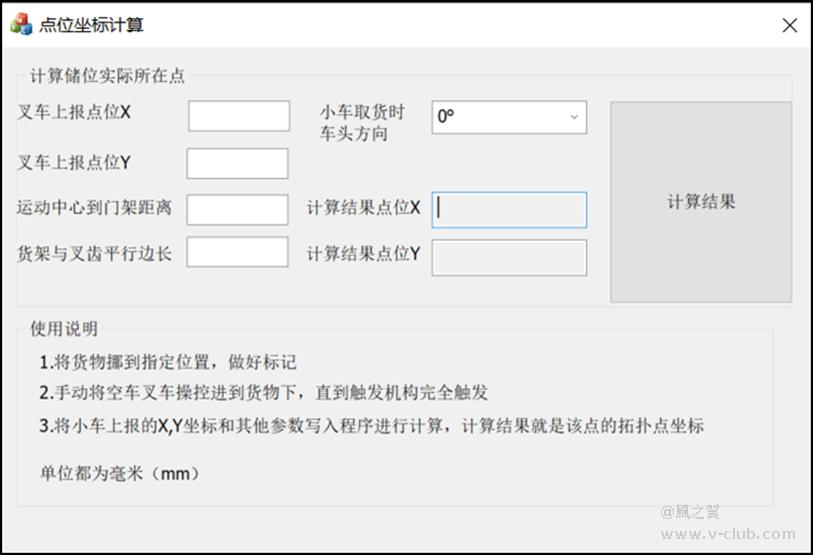
- ①栈板放到储位/工作台位置,做好标记。
- ②叉取机器人操控进到栈板中,直到触发机构完全触发,记录坐标。
- ③将小车上报的X,Y坐标和其他参数写入“点位坐标计算”程序进行计算,计算结果就是该储位的拓扑点坐标。
- ④如果有多种规格栈板需要放到同一个位置,需要将两种栈板几何中心重叠放置,再计算;
- ⑤叉车储位/工作台位置坐标计算需要 RCS能力集→本地配置→叉车偏移误差功能开启;

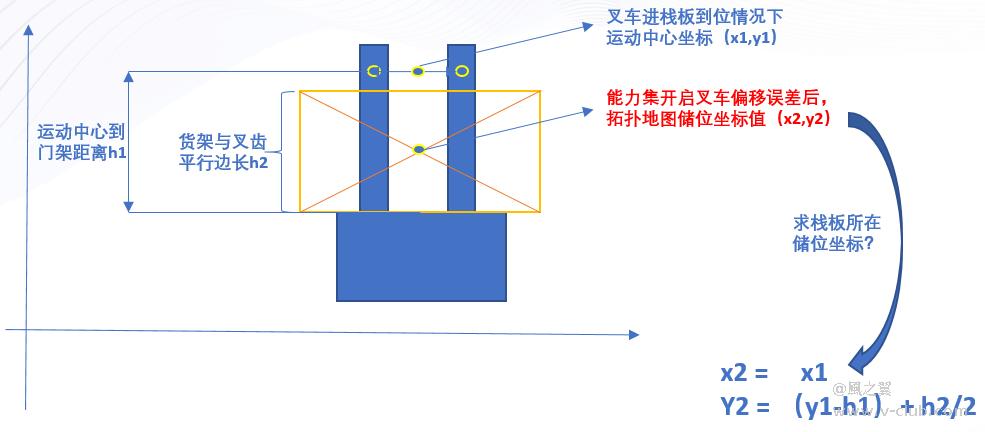
叉车储位/工作区坐标计算原理
关键项
- 不要采取叉车遥控进栈板直接记录运动中心坐标当成储位坐标的方式;
- 养成规范操作:把能力集中“叉车偏移误差开启”,采用上述方式计算或使用“点位坐标计算”软件来计算出储位坐标值;
- 开启叉车偏移误差,可以支撑同一储位多种叉车车型或支持多种尺寸的栈板。
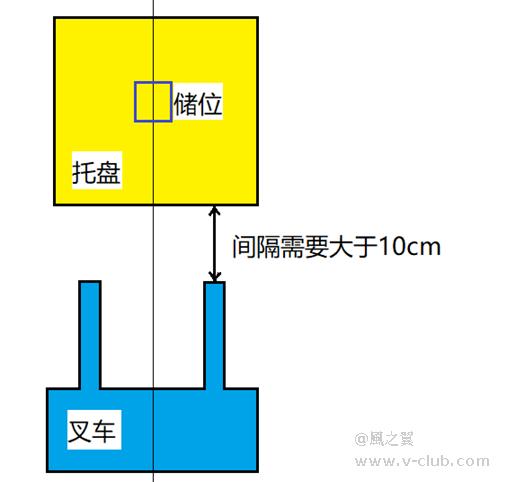
4.2 叉车等待点坐标确认
- 储位坐标确认后,将托盘摆放至储位,要求机器人在等待点时叉尖距离托盘10cm以上。
- 如果开启了栈板识别功能,要求机器人在等待点时叉尖到托盘边缘≥60cm。
- 计算等待点坐标,可参考储位/工作台坐标确认方法。
4.3 关于障碍区
叉车储位后画障碍点作用,是因为叉车插进栈板后运动中心会超过储位坐标值,需要往储位后面多走一些,储位到障碍点提供了叉车多走的路线,并且障碍点自身不会让叉车完全到达。
4.4 关于弧线设计
4.4.1 弧线设计
- 弧线半径尽量放大,不得小于0.5米,小于0.5建议原地旋转。
(补充:一般弧线小于0.5m的通道宽度也不够原地旋转,所有售前方案中弧线宽度要确认好,提前介入到售前方案核查)
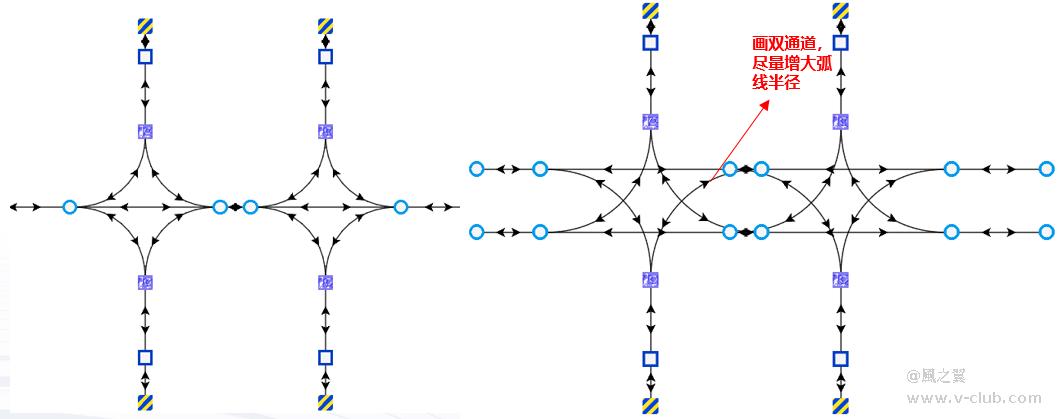
- 一个等待点尽量保证有两条出入路径。
- 对于双排货架可将单主干道改为双主干道,以增大弧线半径。
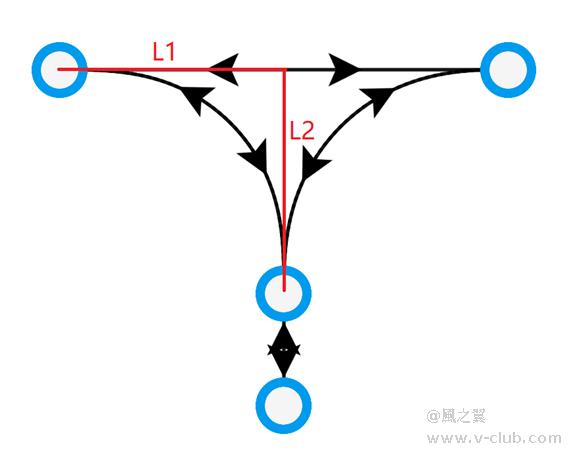
- 两个端点保持对称,呈1/4圆状。如图L1=L2。
补充:进储位等待点的弧线要尽量画对称,通道上转弯的弧线可以不用刻意画对称。
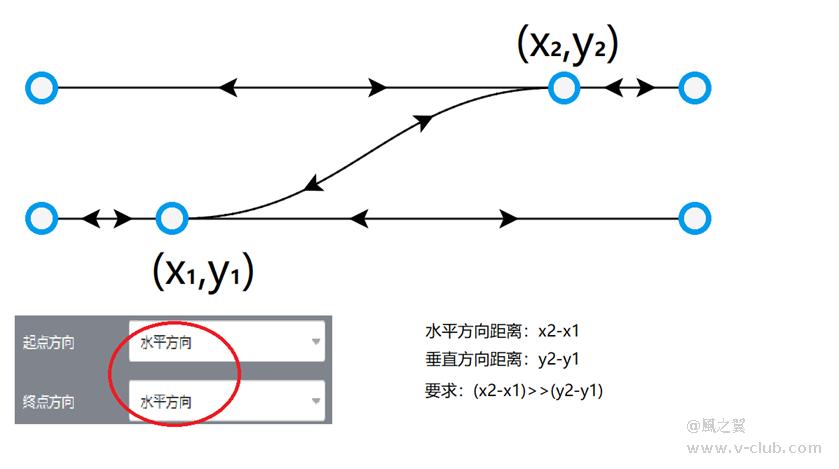
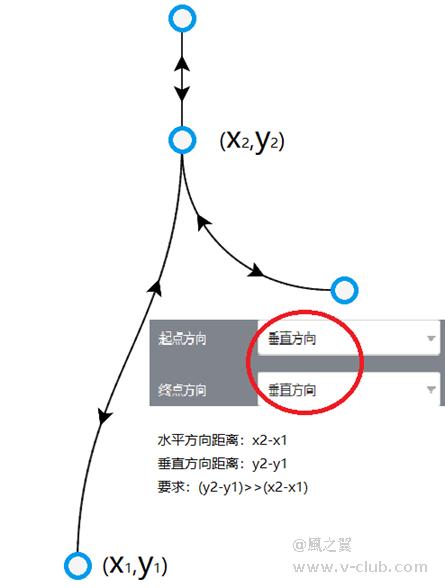
4.4.2 关于S型弧线
S弧线不对称原则:对于两条平行主干道的过渡切换线或存在特殊的对接场景时,需要画此类线。原则为:起点/终点方向上的距离远大于另一个方向上的距离。
补充:远大于可理解为大2倍
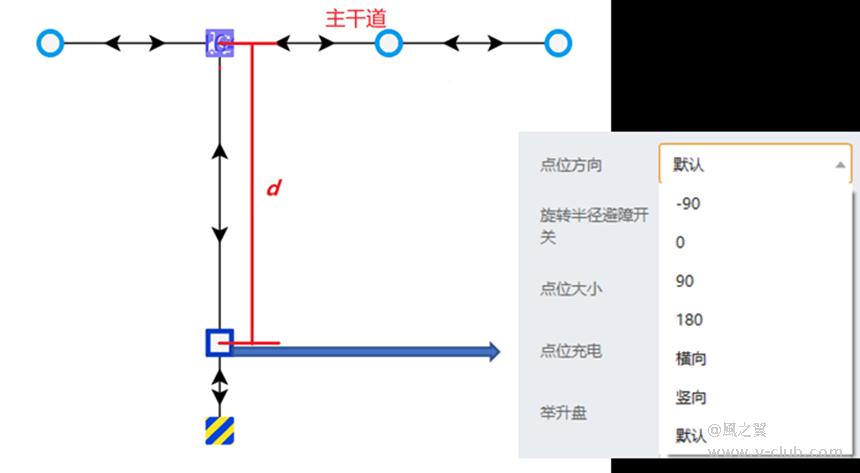
4.4.3 关于原地旋转
旋转点与叉车等待点为同一点,且位于主干道上。
注意事项:
①确保旋转点至储位的距离“d”充足。机器人旋转时,不会与储位上的货架或托盘产生干涉。
②无需设置旋转点的点位方向,通过储位的点位方向来保证机器人进储位方向。
4.4.4 关于直线速度
在正常路面情况下,直线的速度一般配置如下:
- 全速前进:空车为1.5m/s,背货为1.2m/s
- 一般车速前进:空车为1.2m/s,背货为1.0m/s
- 一般车速后退:默认为0.3m/s
- 若长直线上存在某段由于地面有坎、不平或定位等其他原因,可减小两点位之间的速度。

4.4.5 关于弧线速度
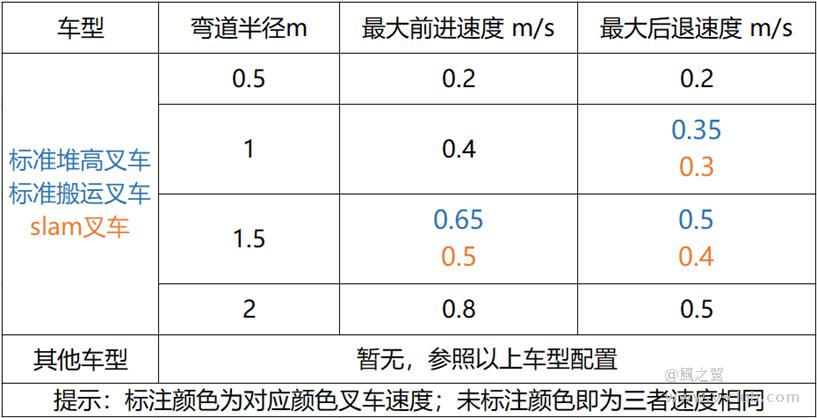
① 运行RoboX,进入:”参数配置”>”运动配置”>”速度参数”。
② 配置最大角加速度、最大角减速度、最大角速度。
注意:旋转速度切勿超过出厂的默认配置值。

5. 任务模板配置
任务模板中叉车等待点一般要打开,除非有特殊业务需求;
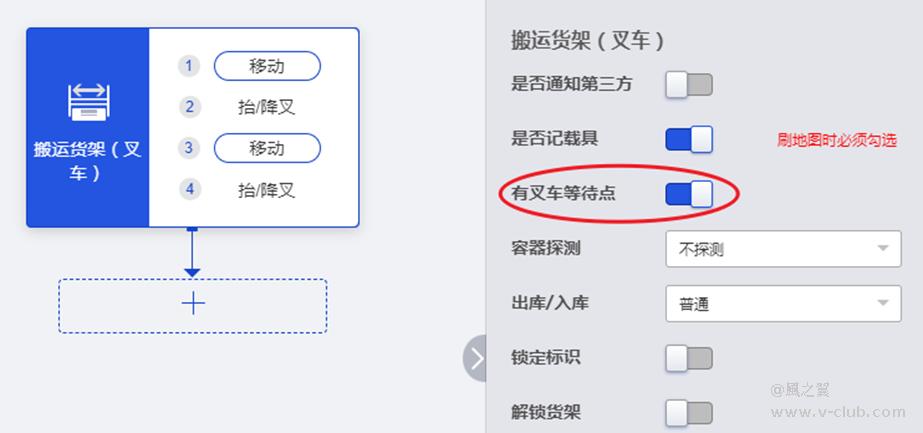
注意:
有两处关于等待点的配置,这两处都要开启:
- ① 任务模板中叉车等待点是给叉车放货后回等待点使用;
- ② 设备类型中叉车等待点是让叉车在等待点升降叉、调叉使用。
6. 一些业务场景说明
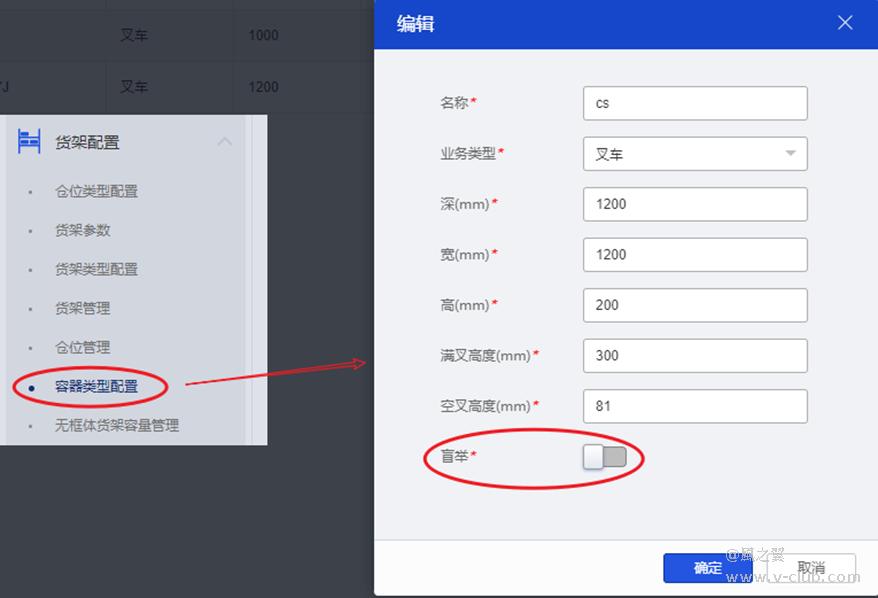
6.1 拆垛与码垛
- 1. 如果是码垛和拆垛的业务场景,容器类型中一定要打开盲举,目的是不记容器编号。
- 2. 如果不是仓储项目和tps协议,都建议把容器盲举开启,因为开启了盲举,对returnPod、transPod等第二步需要触发的任务,可以不用下发容器编号也能触发执行,如果没有开启盲举,则一定要下容器编号才会执行。
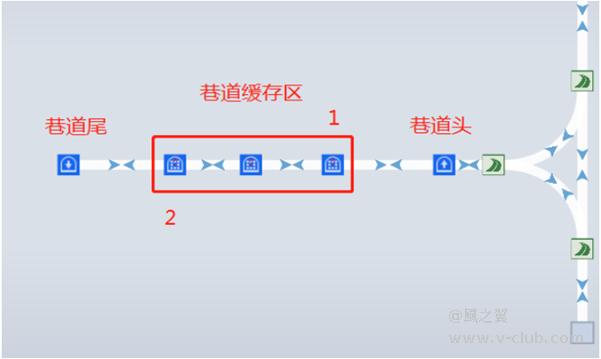
6.2 巷道
- 双向巷道需要画叉车等待点(先进先出);
- 单向巷道不需要画叉车等待点(先进后出)

6.3 电梯场景
- 叉车跨楼层搬运,不同楼层之间的地图方向要一致,点位坐标不需要完全一致,方向要一致。
- 叉车跨楼层搬运,建议叉车到达目标楼层后,电梯开了门再切地图,增大激光视野范围。(潜伏车没这个要求,先切后切都行)
6.4 刷地图与记货架
- 刷地图是为了算法层面有保护,建议开启刷地图;
- 记货架也需要开启,如果有需要二次触发的任务(如returnpod,transpod等),则一定要记货架第二步才能触发执行。
7. 上线流程总结
① 扫图 (反光条粘贴、扫图路线、闭环)
② 设备类型配置 (加密、偏移开启)
③ rcs能力集 (精度、偏移开启)
④ 画地图 (储位/工作台坐标值计算、等待点坐标、弧线半径与速度)
⑤ 容器类型 (盲举、容器深是指与叉齿平行的一边)
⑥ 货架类型
⑦ 储位、货架、容器 绑定 (实体货架与虚拟无框体货架、起点绑容器,终点不绑)
⑧ 任务模板配置 (等待点开启)
⑨ 下发任务


 读码器TCP通讯配置全解析:从客户端到服务器的实战指南2026-03-09
读码器TCP通讯配置全解析:从客户端到服务器的实战指南2026-03-09 突破标签印刷缺陷检测瓶颈,海康机器人推出高效易用型解决方案2026-03-10
突破标签印刷缺陷检测瓶颈,海康机器人推出高效易用型解决方案2026-03-10 【计算成像】超越像素:计算光学与下一代工业视觉系统2026-03-09
【计算成像】超越像素:计算光学与下一代工业视觉系统2026-03-09- 诚邀参会|2026年4C智能工业视觉检测专项挑战赛(本科+高职)线上启动会,邀您共启新程!2026-03-20
- 如何适用3dmvs进行图像后处理2026-03-23
 浙公网安备 33010802013223号
浙公网安备 33010802013223号