应用案例|3C行业-单旋转轴多吸嘴柔性盘抓取
- 0
- 0
- 分享
- 2023-05-06 14:55
本项目的客户是一家以从事科技推广和应用服务业为主的企业,主要经营范围是机械设备销售;工业机器人销售;工业自动控制系统装置销售,工业控制计算机及系统销售。项目现场的皮带运转,带动治具到指定位置,相机拍摄柔性盘上的插针并通过VM算法平台进行处理,得到插针坐标信息,发送给PLC。机械手进行抓取,并放置到治具中,插装完成后,流动到下一工站进行其它的组装。
一、项目背景
(1)项目需求
定位插针的位置度,发送坐标

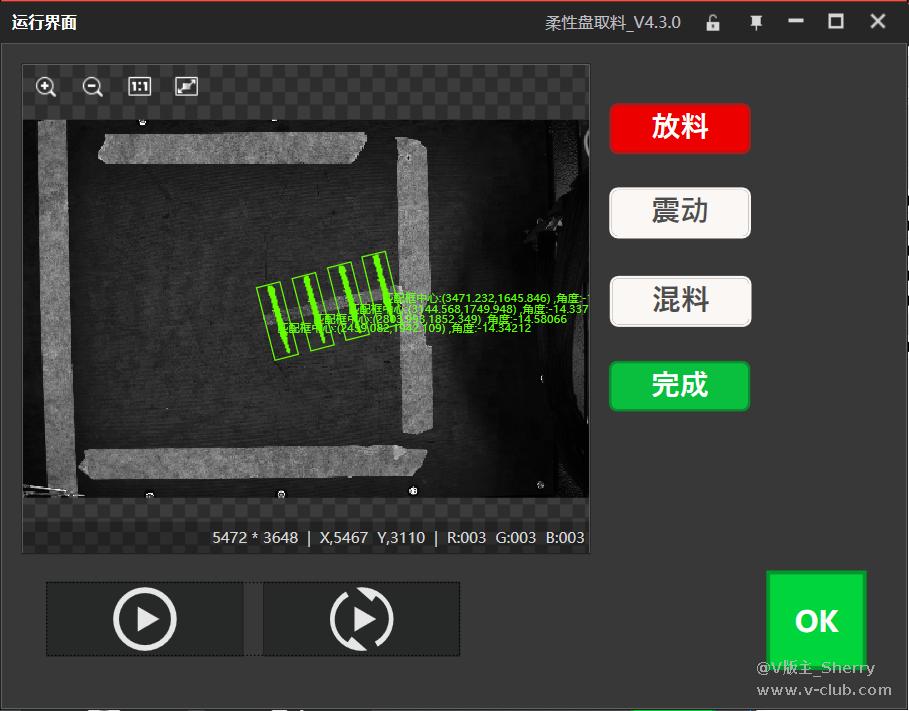
↑ 检测实物图
(2)项目痛点
① 多吸嘴抓取,相邻物料不能抓取,否则会压坏物料。
② 流程搭建复杂,不便于交付。
③ 大角度旋转,定位精度较差,无法定位准确。
二、方案描述
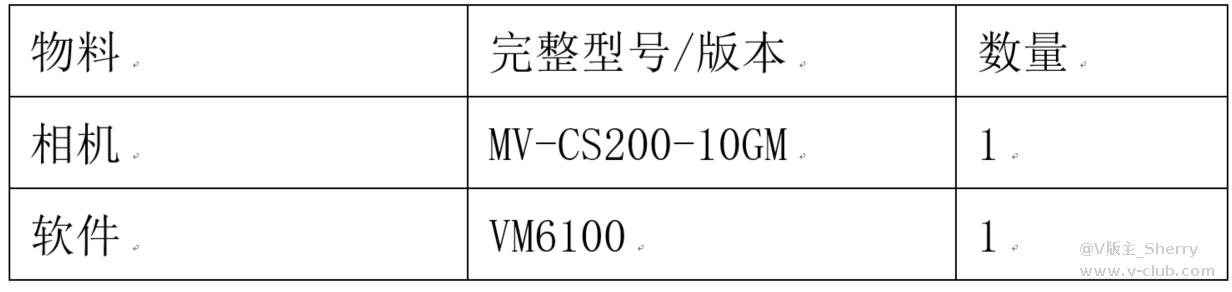
(1)项目配料单
(2) 方案示意图
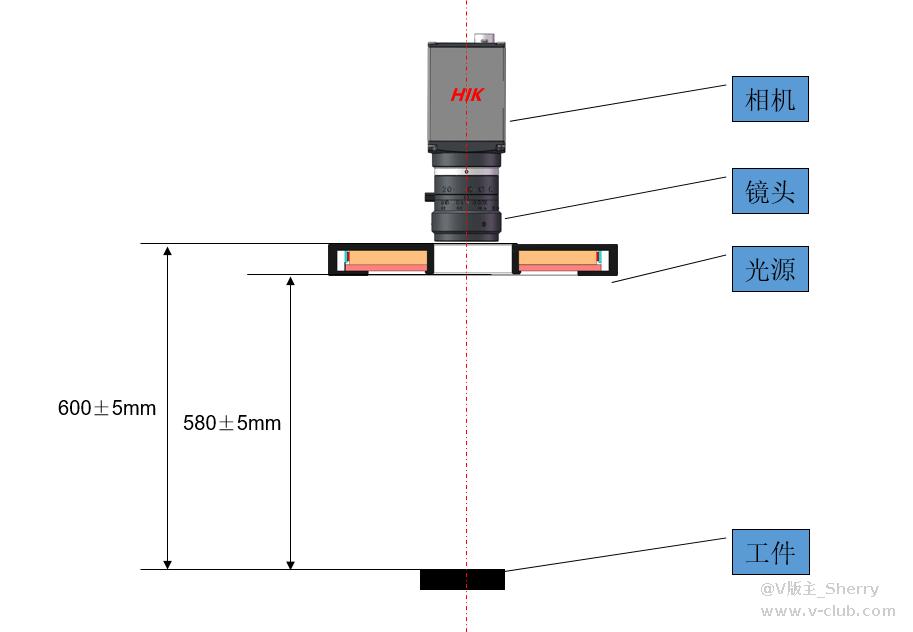
✈ 实际架设图如下

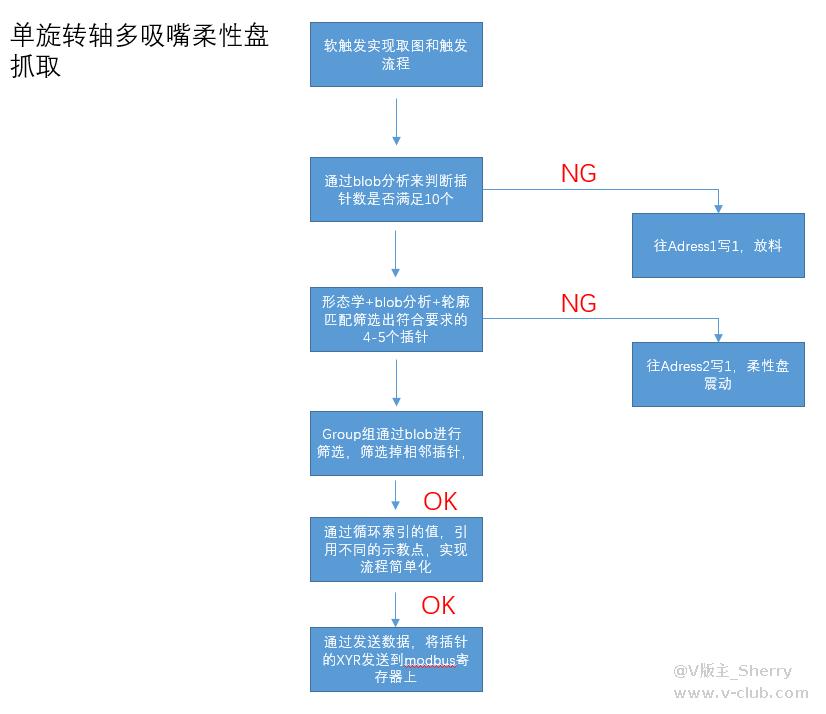
✈ 方案思路如下
(3)方案搭建与调试
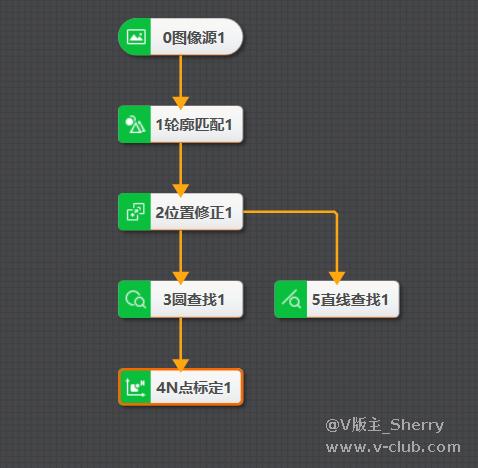
1.标定流程:
· N点标定:使用的是特征移动法,9点平移+7点旋转,作用是将图像坐标系转化为物理坐标系。
✈ 标定流程图如下
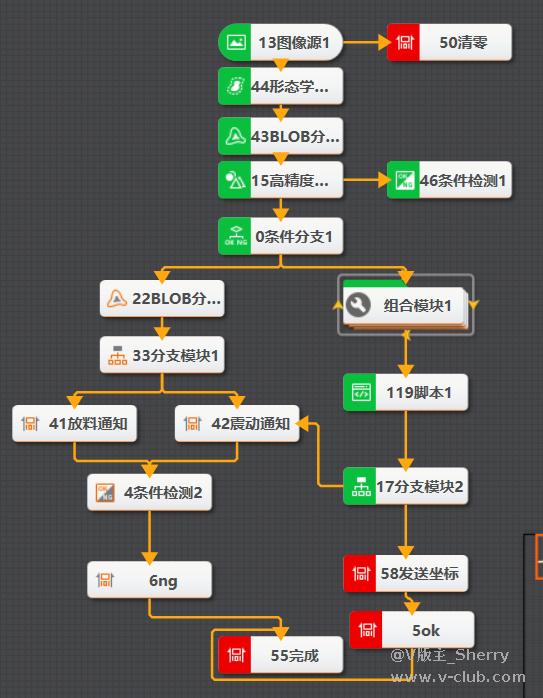
2.生产流程:
① 形态学+blob分析+轮廓匹配: 初步筛选符合要求的4-5个插针。
② Group:根据上一步的轮廓匹配的点,进行位置修正,建立blob分析,用于精准筛选掉相邻的插针。
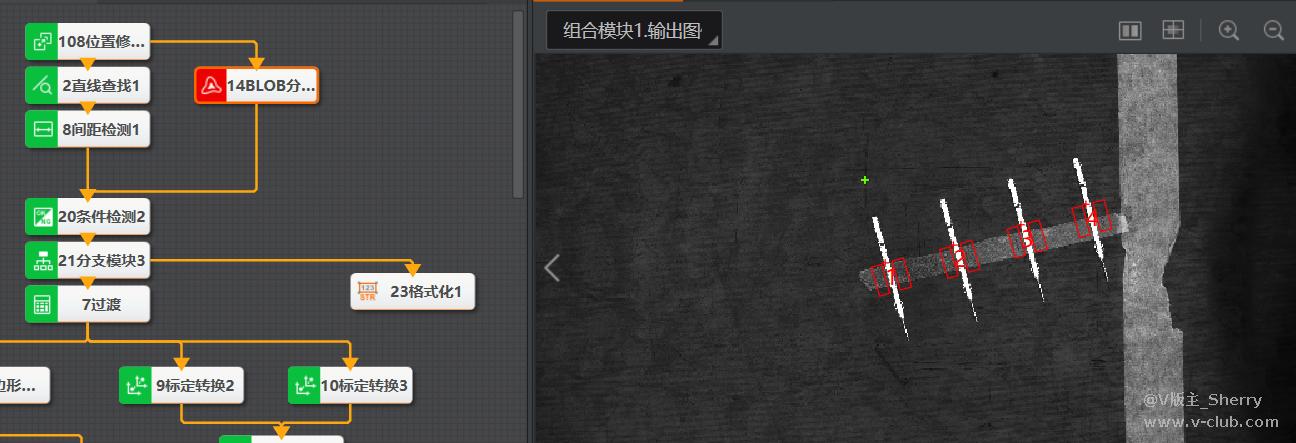
③ Group-单点对位+变量计算:脚本通过group的index,设置4个吸嘴的的示教位置到单点对位,通过该组合模块得到相对坐标以及绝对坐标。

④ 脚本+发送数据:将Group输出的数据进行排序整理,按XYR顺序发送到modbus的地址上。
✈ 生产流程图如下
项目难点1:
多吸嘴抓取,相邻物料不能抓取,否则会压坏物料。
解决方案:
通过形态学+blob分析+轮廓匹配先初步筛选相邻的,在通过Group-位置修正+blob分析,精确筛选掉相邻的插针。
项目难点2:
流程搭建复杂,不便于交付。
解决方案:
原先客户是直接搭建4个单点对位,流程较繁琐,现通过脚本的方式进行优化,在group中,通过group的index,设置4个吸嘴的的示教位置到单点对位,通过该组合模块得到相对坐标以及绝对坐标。
✈ 原方案如下
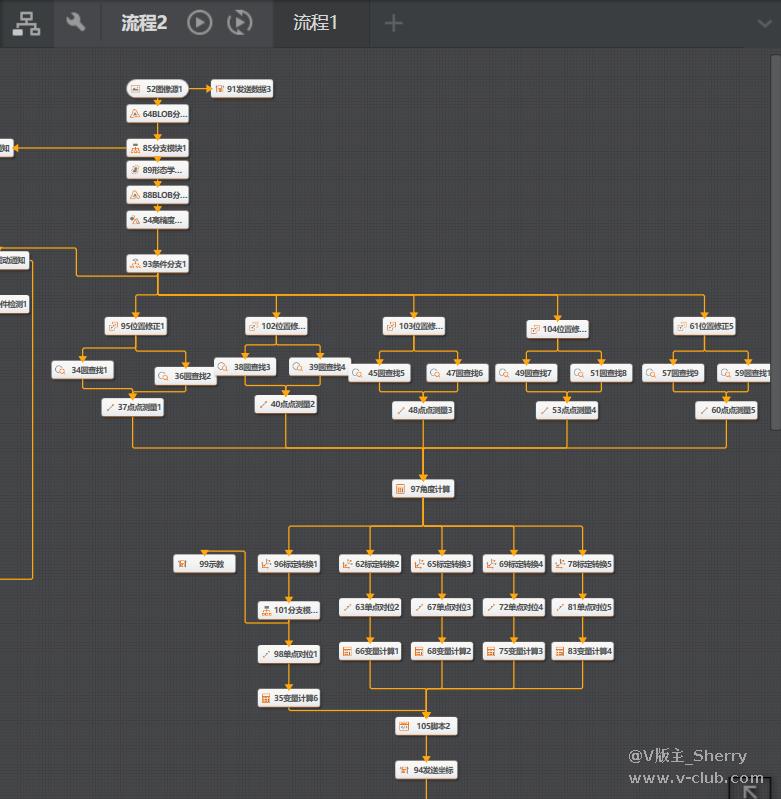
✈ 现方案如下

项目难点3:
大角度旋转时,定位精度较差,无法定位准确。
解决方案:
原先是N点标定的角度进行3次旋转,共旋转60°。现在是7次旋转,共旋转180°,目前大角度的抓取也可行,能满足客户需求。
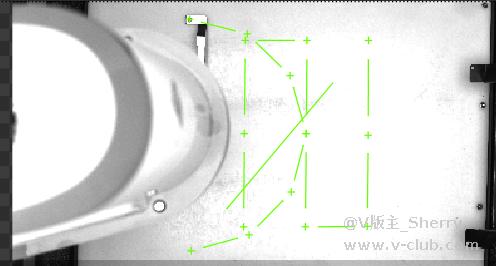
(4)调试效果图
三、方案优势
· 本视觉方案实现了插针抓取定位的需求,视觉方案整体耗时在230ms,能满足客户的节拍和应用需求。
· 帮助客户解决了流程臃肿的问题,简化抓取流程,便于交付。
· 实现插针定位抓取功能,定位抓取精度<±0.4mm,满足客户精度要求。
附件:
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
评论请先登录 登录
全部评论 0


相关阅读
 现场运维异常处理手册2025-04-02
现场运维异常处理手册2025-04-02 海康移动机器人实施运维工程师认证资料目录2025-04-15
海康移动机器人实施运维工程师认证资料目录2025-04-15 【VM实现Halcon例程】光度立体法缺陷检测2025-04-17
【VM实现Halcon例程】光度立体法缺陷检测2025-04-17- 关节机器人防护分类分享2025-04-15
 浙公网安备 33010802013223号
浙公网安备 33010802013223号