- 0
- 1
- 分享
- 2023-06-29 10:54
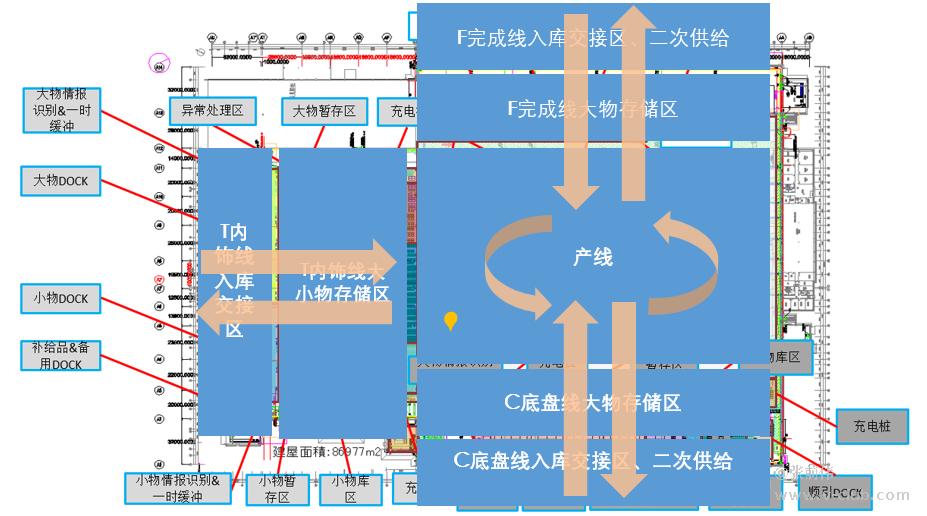
一、项目背景
项目总体规划面积约86977平方米,运行AMR台数超1000台,基于目前的RCS调度系统,无法实现单张地图的调度控制,该项目定制了无感地图切换的功能,将现场业务地图进行切块划分,不同地图间通过无感地图切换的功能实现AMR的调度运行。
二、配置说明
1. 确定两个地图(同一坐标系)之间实际的切换区域,一来一回,单向各一个区域,确保区域间最大货架保护空间,确保地图切换区域≥2米。
2. 假设F、E两个地图间距是2.2米,将区域分成十个不等距离(200~350mm)点如:350mm,250mm,200mm,200mm,200mm,200mm,200mm,200mm,250mm,350mm。
F地图: F地图切换到E地图,线末端对应点点属性设置成E地图缓冲区。如下图
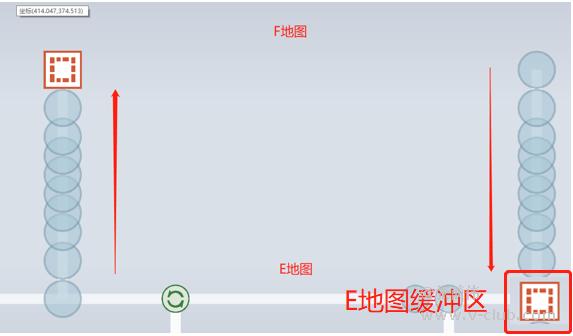
E地图: E地图切换到F地图那条线最后那个点属性变成F地图缓冲区。如下图

3. 地图切换过程中,需要向两个地图RCS进行上报坐标定位,整个切换过程需要一定时间,建议线属性速度调整为300mm/s。注意:两个RCS地图线属性均需要改成同等速度。如下图

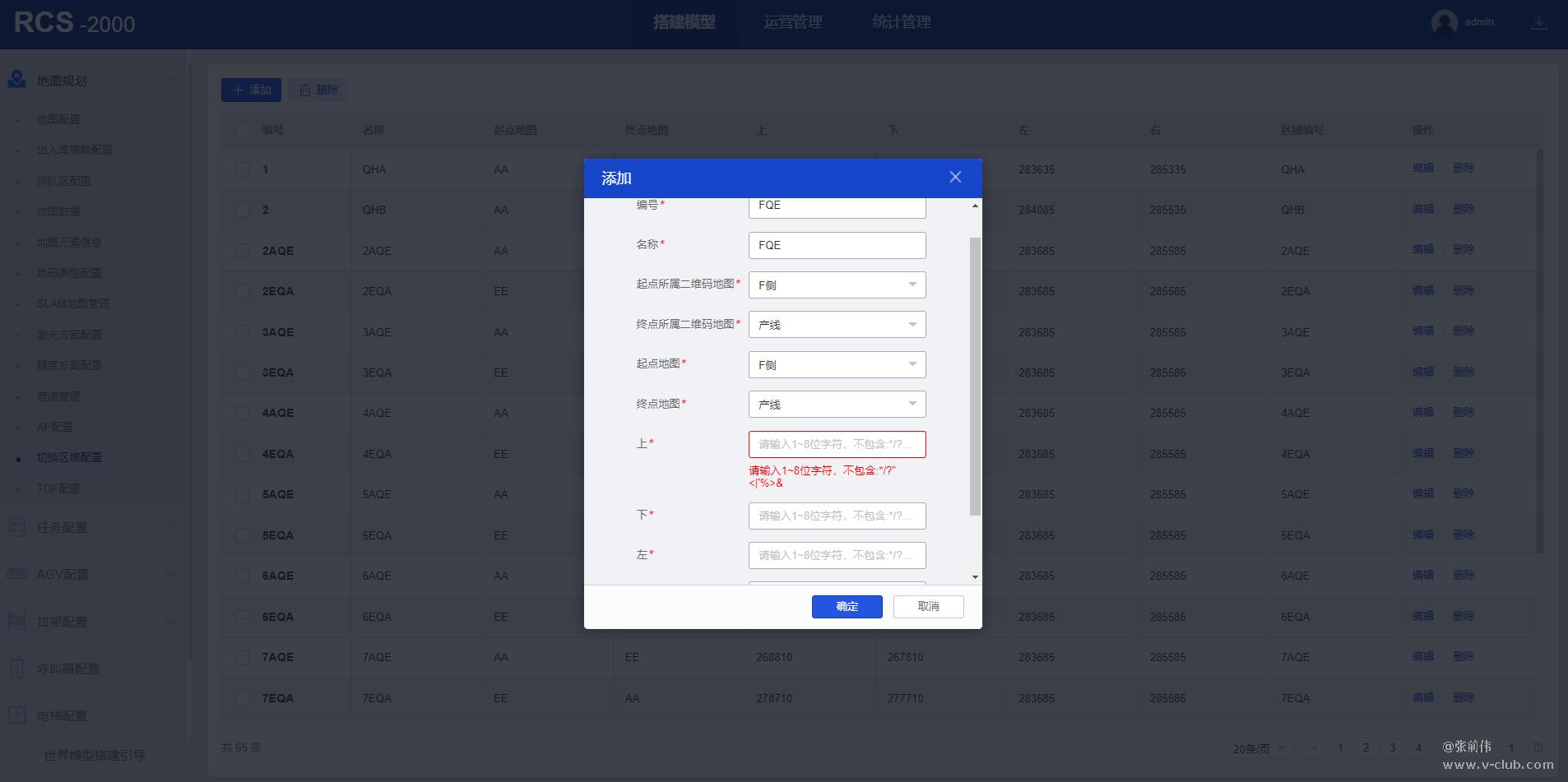
4. 两侧点属性是E地图缓冲区的点添加库区,添加冷热区,并框选名字如(F地图切换E地图, 我就简称为FQE)。如下图

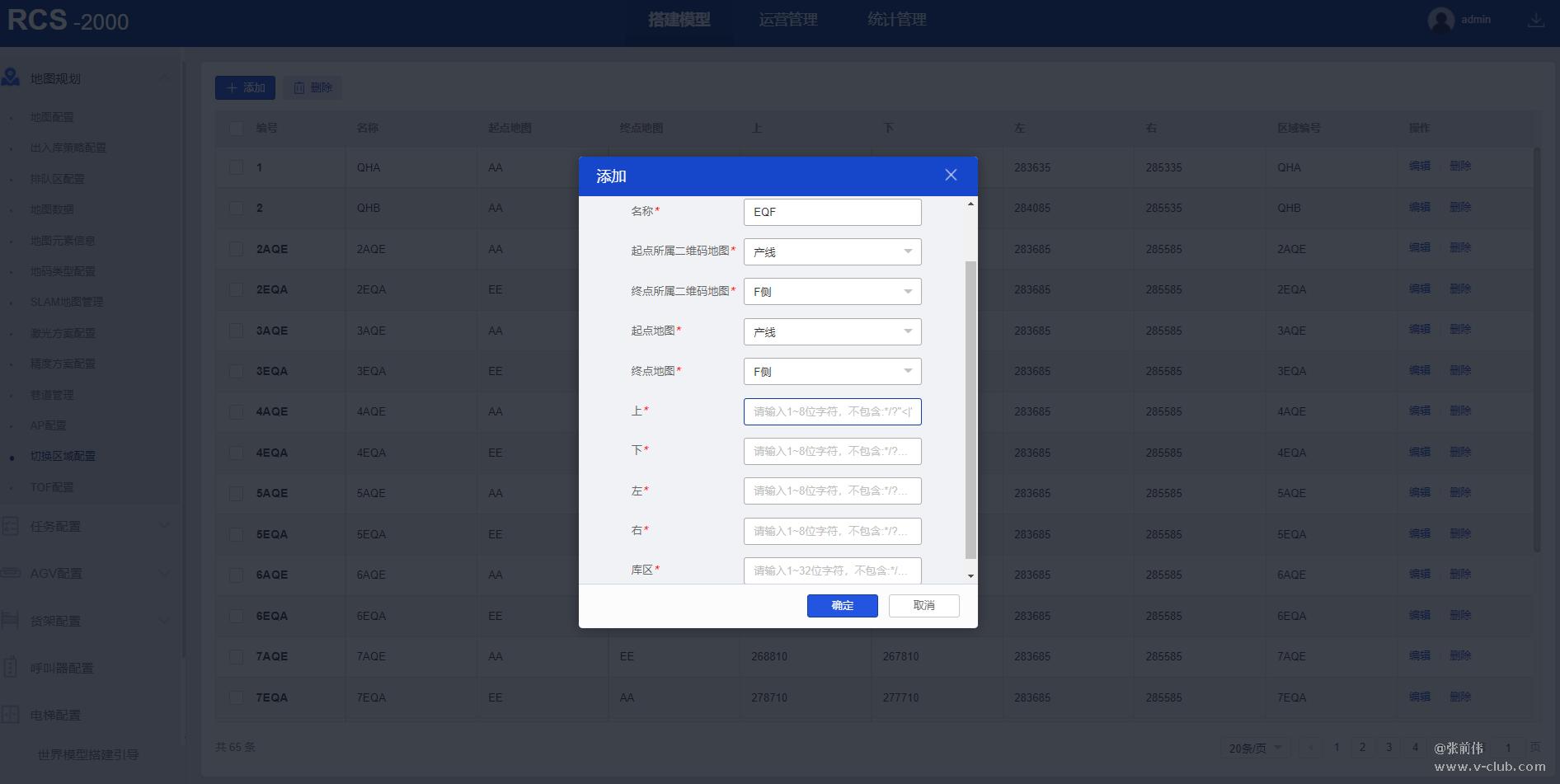
5. 在搭建模型里添加切换区域配置;
配置如下图:需要填写补充两个地图切换区对应的相应的地码数值,添加上下左右的意思是需要把十个点中间八个点的数值框在里面如图上下区两点中心数值,左边-500mm右边+500mm。
6. F地图的地码:十个地码,前2个地码贴成F地图,后8个E地图。
7. E地图的地码:十个地码,前2个地码贴成E地图,后8个F地图。
三、测试验证
所有配置及实施工作完成后,可以安排1台车进行实车测试,通过CMS系统下发一个空车切地图的移动任务,确认机器人切地图是否正常。


- 1

 话术-用AI协助编写VM3D脚本模块的代码2026-06-29
话术-用AI协助编写VM3D脚本模块的代码2026-06-29 基于基础应用扩展的偏心抓取算法2026-07-07
基于基础应用扩展的偏心抓取算法2026-07-07 更换主控具体需要准备哪些工具和文件?2026-07-23
更换主控具体需要准备哪些工具和文件?2026-07-23- 移动机器人技术分享-26年7月2026-07-17
 浙公网安备 33010802013223号
浙公网安备 33010802013223号