- 0
- 1
- 分享
- 2023-06-30 10:36
1.1 卸载运管NTP服务
登录运管卸载运管NTP服务。

1.2 ntpdate校时
步骤1 SSH登录服务器后台
步骤2 输入date,查看当前时间
步骤3 输入ntpdate -u 10.12.132.230,使用ntpdate先进行校时,防止和NTP服务器时间差过大无法自动校时

1.3 开启系统NTP服务
步骤1 SSH登录服务器
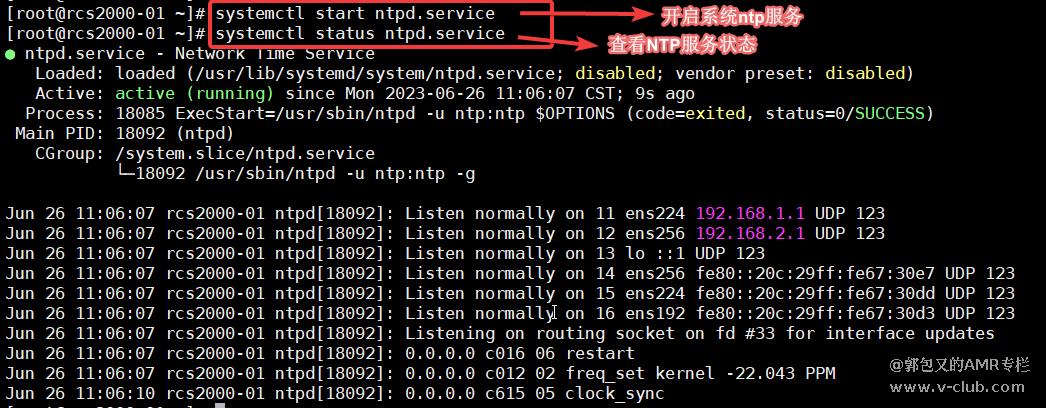
步骤2 输入systemctl start ntpd.service,开启系统NTP服务
步骤3 输入systemctl status ntpd.service,查看服务是active (running)说明系统NTP服务运行正常
1.4 修改ntp.conf配置文件
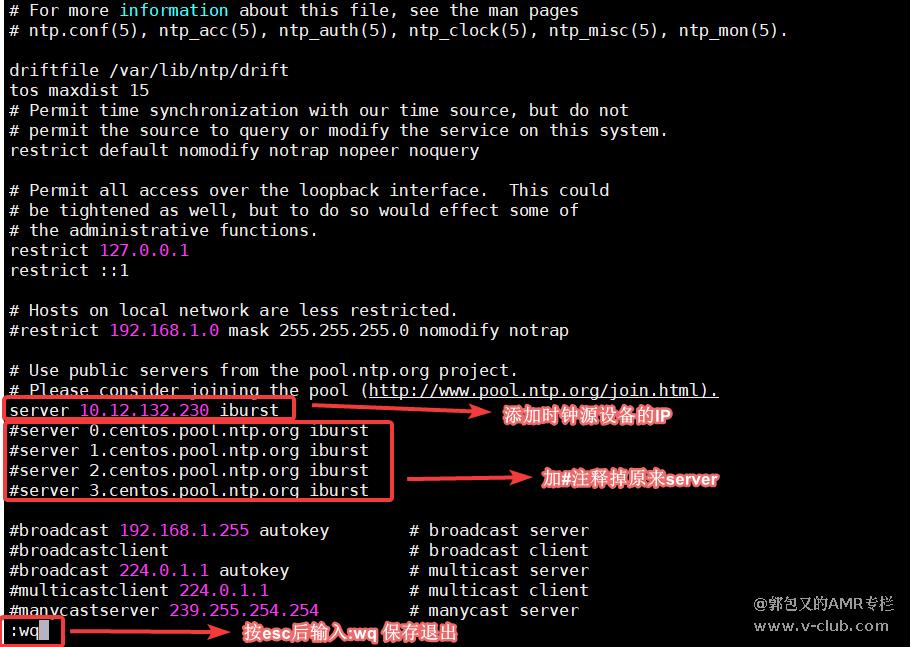
步骤1 输入vi /etc/ntp.conf,编辑ntp.conf配置文件
步骤2 输入server 10.12.132.230 iburst,添加NTP服务器的IP
步骤3 加#注释掉原来的NTP服务器
步骤4 按“Esc”键退出编辑模式,输入:wq保存退出

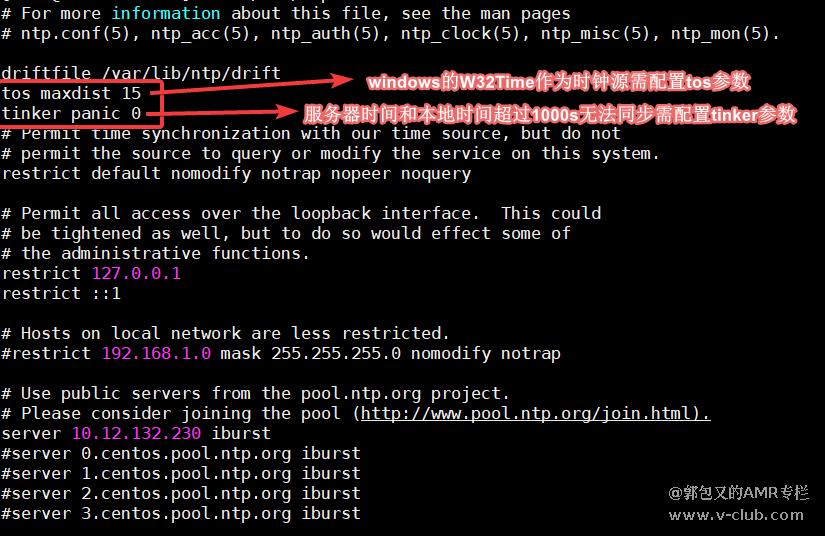
参数补充:
tos maxdist 15:使用偏差超过1.5s的时钟源或者使用windows的W32Time作为NTP服务器需要配置tos maxdist 15,否则无法校时。
tinker panic 0:当服务器时间与本地时间超过1000s,无法进行校时,添加tinker panic 0配置可以避免这个问题。
1.5 重启系统NTP服务
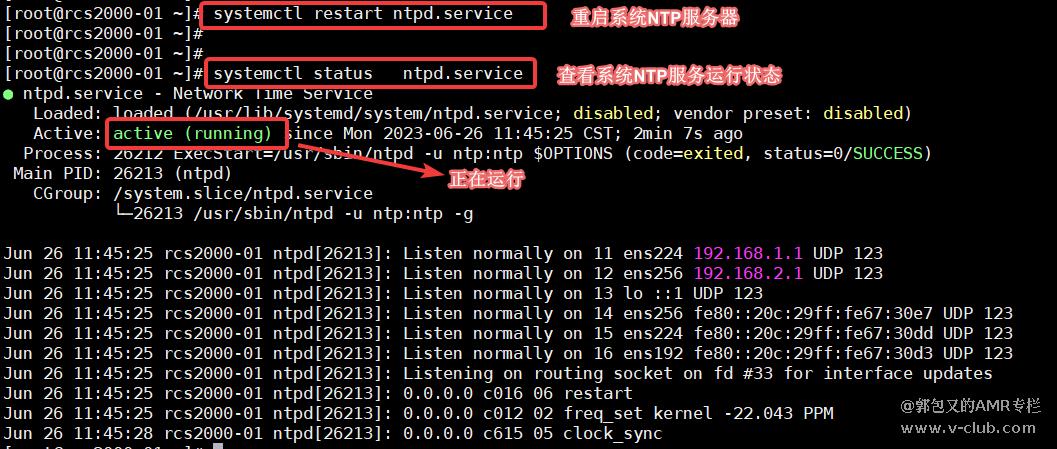
步骤1 输入systemctl restart ntpd.service,重启系统NTP服务
步骤2 输入systemctl status ntpd.service,查看系统NTP状态是否是active (running)正在运行
1.6 检查系统NTP服务同步情况
步骤1 输入ntpstat,显示synchronised表示已经正常同步校时

步骤2 输入ntpq –pn,在remote中显示有*表示已经正常同步校时

步骤3 输入date,和时钟源服务器对比,如图1-10,时间一致表示已经正常同步校时


- 1

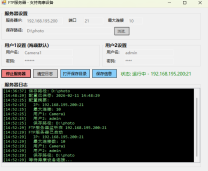 FTP服务器搭建,支持海康相机FTP输出图像2026-02-27
FTP服务器搭建,支持海康相机FTP输出图像2026-02-27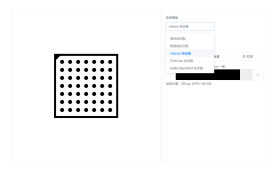 标定板在线生成器2026-02-11
标定板在线生成器2026-02-11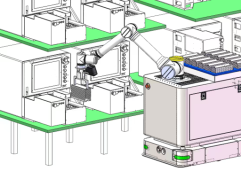 【具身智能系列】复合机器人+SC5000XM硬软件一体行业解决方案2026-02-10
【具身智能系列】复合机器人+SC5000XM硬软件一体行业解决方案2026-02-10 移动机器人工程师认证回顾-26年1月2026-02-10
移动机器人工程师认证回顾-26年1月2026-02-10- 读码器TCP通讯配置全解析:从客户端到服务器的实战指南2026-03-09
 浙公网安备 33010802013223号
浙公网安备 33010802013223号