- 0
- 1
- 分享
- 2023-09-18 15:53
一、标定前需要确定的信息
1、主控版本
一体式标定需要主控V3.0以上版本支持,部分V2.9版本主控也支持一体化标定,具体需要与相关研发人员确认。
2、支持的机器人类型
目前针对差动车型以及全向车型的一体式标定(叉车一体化标定需要外部相机,现场不具备条件),根据车型的不同标定的传感器也不同,不同车型一体式标定的传感器如下表
|
传感器类型 |
差动车 |
全向车 |
|
下镜头 |
√ |
√ |
|
上镜头 |
√ |
× |
|
里程计 |
√ |
× |
|
激光 |
√ |
√ |
二、标定前准备
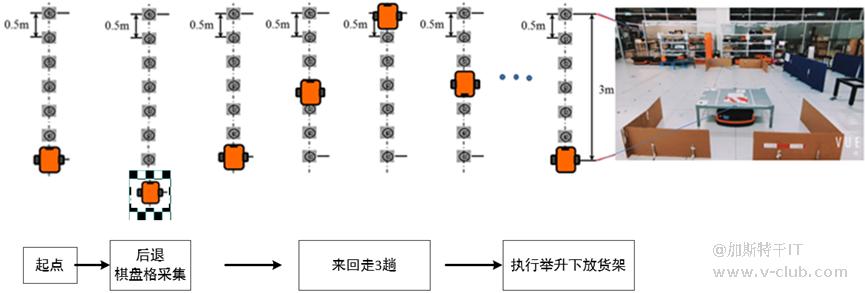
1、 准备一块3m*5m的场地,场地保证地面平整。
2、按照一体化标定要求打印二维码和棋盘格,粘贴方式如下图,Robox工具使用最新版本。
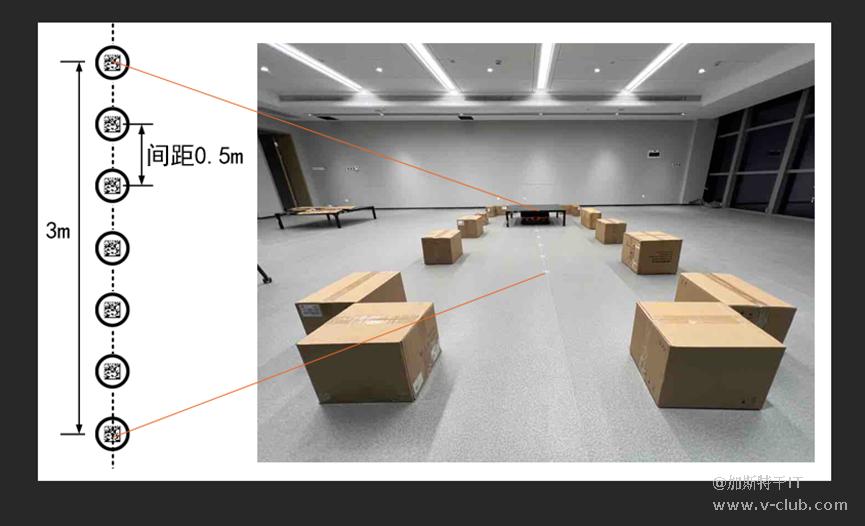
3、棋盘格和二维码实际的布局如下,严格按照该布局进行,货架应该摆放在起点地码位置。
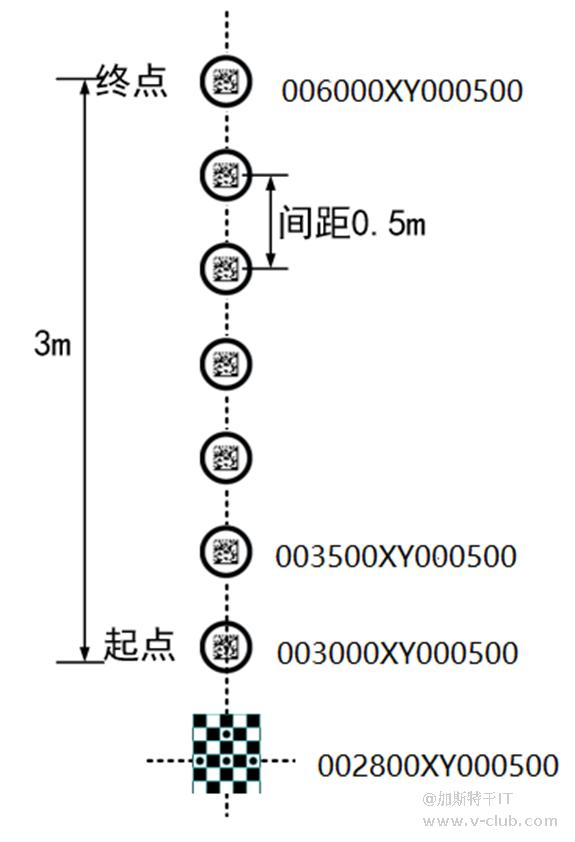
4、 现场标定场地如上图所示,包含一条3m长的二维码路线,码值需布置与上图码值相同,地码DM值为14(RoboX中修改无效),不能使用DM16。
5、 相距起点二维码向后20cm粘贴一张棋盘格,棋盘格的中心与起点二维码中心距离为20cm。
6、 需要一个现场实际使用的货架,货架放置在路线起点,货码中心尽量与第一个地码中心对正,货码DM值为12(RoboX中修改无效),不能使用DM16。
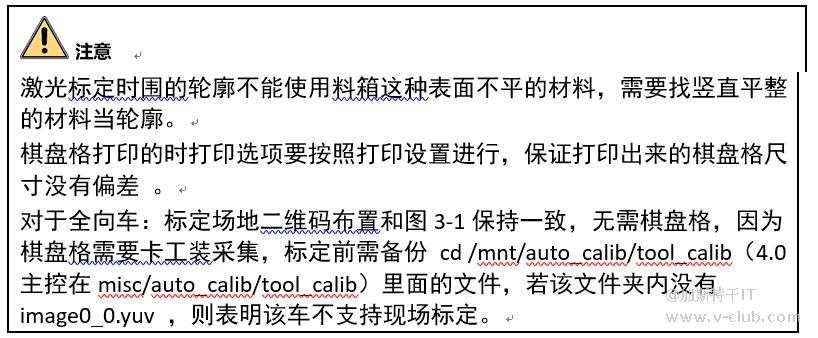
7、 特别注意的是,如需标定导航激光,需要在标定场地周围构建良好的slam轮廓环境,slam轮廓必须包含四个直角轮廓,如图3-1所示的轮廓环境。
8、 有条件的,可将四周全部设置围挡如下图所示,需要保证左右两侧轮廓信息不相同,非slam导航车型则无需布置围挡,只需要布置二维码和棋盘格以及货架。

三、工具操作
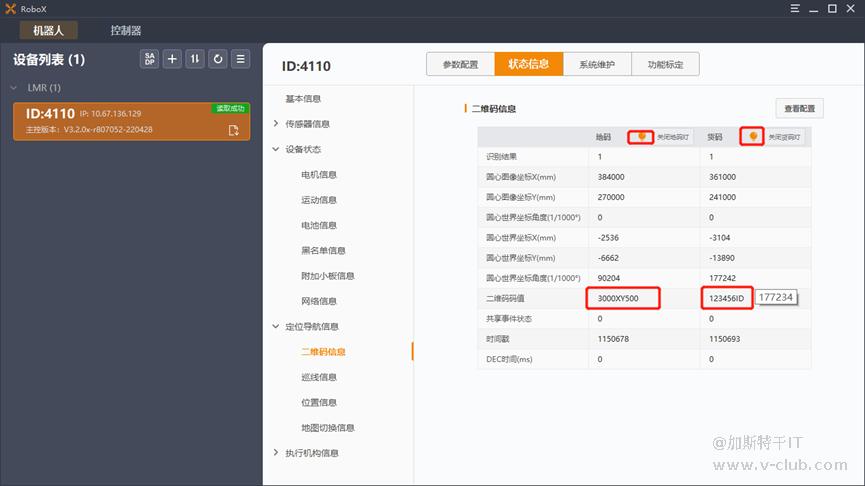
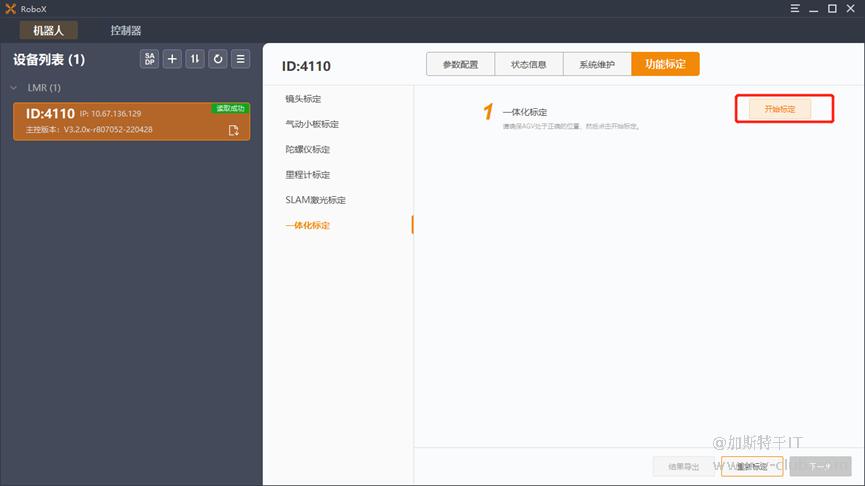
1、通过RoboX工具可以看到机器人在起始位置:上下镜头分别读到地码信息和货码信息。
2、进入“功能标定”>“一体化标定”,点击“开始标定”,之后机器人会进入标定状态,执行任务。
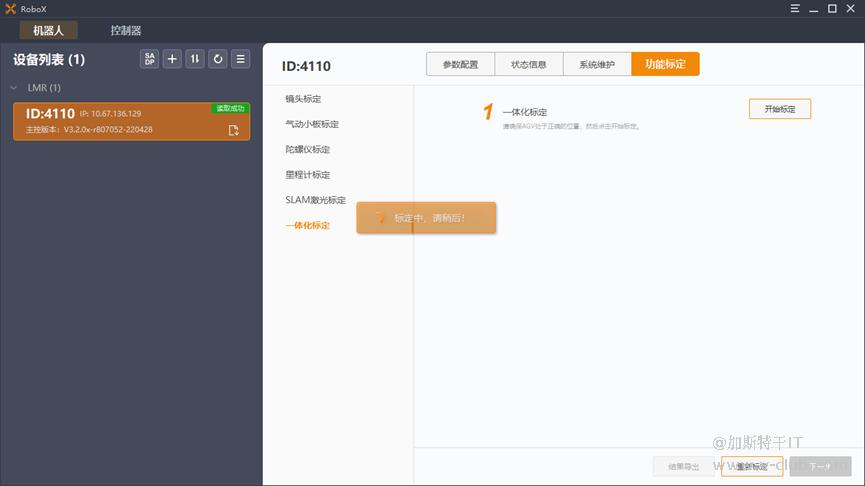
3、机器人进入标定状态之后工具可以看到如下界面。
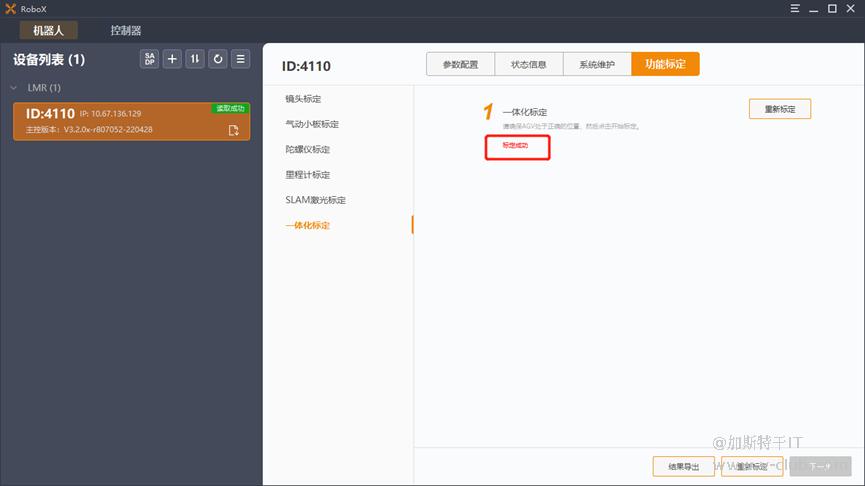
4、整个标定过程大概持续3-6分钟左右,标定成功完成之后RoboX工具可以看到返回的“标定成功”。
四、标定动作
开始标定后,机器人执行标定动作,收集数据发送给客户端,客户端算法执行联合标定优化后,将满足复检要求的标定结果返回给机器人,由机器人进行标定结果的重新写入。
五,标定失败处理
当标定动作开始或者结束之后工具端报错,标定失败,如下图,并未出现具体算法告警码,应该如何处理。

可按照如下方法:
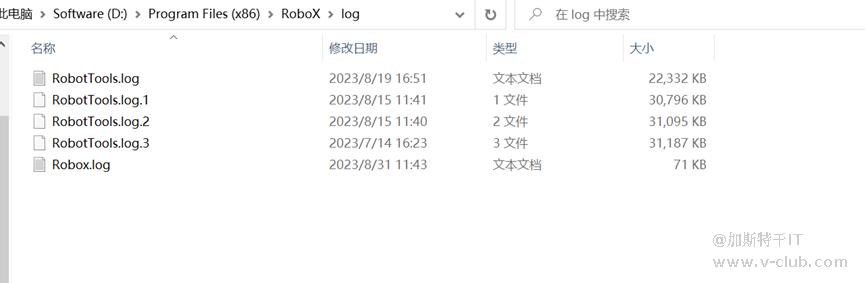
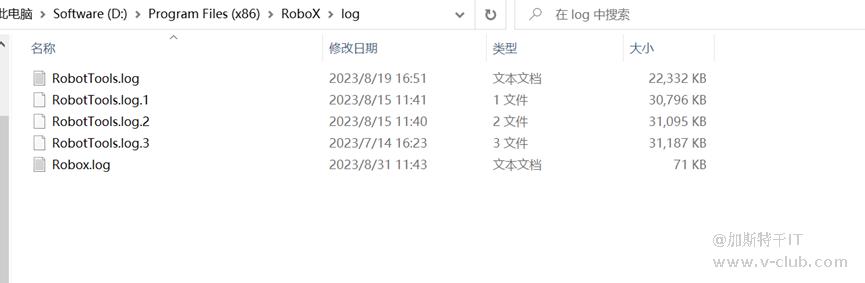
1、收集Robox工具安装目录下的Log文件里的日志信息。
2、 查看机器人目录/mnt/misc/auto_calib/tool_calib 下文件image0_0.yuv和image1_0.yuv大小是否为480000,若文件大小不对则机器人不会回传文件信息给Robox客户端,该问题需要主控优化。

当标定动作开始或者结束之后工具端报错,标定失败,并出现具体算法告警码,则可以按照具体告警码进行处理,告警码信息如下。
|
错误码 (sts code) |
异常信息 |
处理措施 |
|
-2002 |
frm.txt普通帧数据载入异常,数量超限 |
检查fld input文件夹内的frm.txt内的时间和行数,是不是叠加了两次的数据没有清楚,标定过程中不允许中断 |
|
-2003 |
激光数据载入异常 |
检查fld input文件夹内是否有laser_data0.bin |
|
-2004 |
棋盘格图片大小异常 |
检查image0_0.yuv大小是否是469KB |
|
-2010 |
货码位姿计算异常 |
货码不识别 |
|
-2011 |
棋盘格角点提取异常 |
检查棋盘格是否污损 |
|
-2016 |
下镜头棋盘格畸变计算异常 |
检查下棋盘格是否异常 |
|
-3001 |
现场配置参数载入异常 |
检查prm.txt数据是否为空 |
|
-3002 |
现场普通帧参数载入异常 |
检查input文件夹下frm.txt数据是否为空,或者frm.txt中数据行数过大,如超过25000行数据。 |
|
-3003 |
现场激光数据载入异常 |
检查fld input文件夹下laser_data.bin数据是否为空,检查标定场地是否有挡板围起, 检查fld input内slam_map是否删除,需删除 |
|
-3004 |
现场棋盘格角点提取异常 |
棋盘格是否污损,粘贴位置是否与实施规范匹配 |
|
-3005 |
下镜头畸变解算异常 |
棋盘格是否污损,粘贴位置是否与实施规范匹配 |
|
-3007 |
举升前货码不识别 |
检查图像和货码大小 OdoCamAutoData\fld\input\ frm.txt 每一行倒数第9个是货码的字符串,不识别是0x0 |
|
-3009 |
货码位姿解算异常 |
检查货码识别是否正常 |
|
-4001 |
小车定位复检失败 |
检查地码识别是否正常,检查frm.txt中第一行的电机参数(减速比,分辨率)是否正常,地码粘贴质量要保证,角度和距离都要贴准; |
|
-4002 |
货架定位复检失败 |
检查举升前后货码识别是否识别 |
|
-4003 |
激光定位复检失败 |
检查周围环境围挡是否足够 |
|
-4007 |
无下镜头车型需要slam地图 |
联系研发指导建图 |
|
-4008 |
无下镜头车型里程计附件失败 |
检查frm.txt中第一行的电机参数(减速比,分辨率)是否正常;车子是否存在驱动轮打滑等问题; |
|
-4009 |
举升后货码不识别 |
1.检查货码图像 2.替换xml任务(主控根据任务中是否有起始和终止坐标判断是否切换货码识别半径 tool_calib.xml替换目录RoboX\OdoCamAutoCalib) |

- 1

 话术-用AI协助编写VM3D脚本模块的代码2026-06-29
话术-用AI协助编写VM3D脚本模块的代码2026-06-29 基于基础应用扩展的偏心抓取算法2026-07-07
基于基础应用扩展的偏心抓取算法2026-07-07 更换主控具体需要准备哪些工具和文件?2026-07-23
更换主控具体需要准备哪些工具和文件?2026-07-23- 移动机器人技术分享-26年7月2026-07-17
 浙公网安备 33010802013223号
浙公网安备 33010802013223号