应用案例|仓储行业-多底色托盘读码项目
- 0
- 0
- 分享
- 2023-09-14 19:25
在仓储行业或是一些广义物流场景,往往需要对整托或整垛的产品进行信息识别,
一、项目背景
1.1项目需求
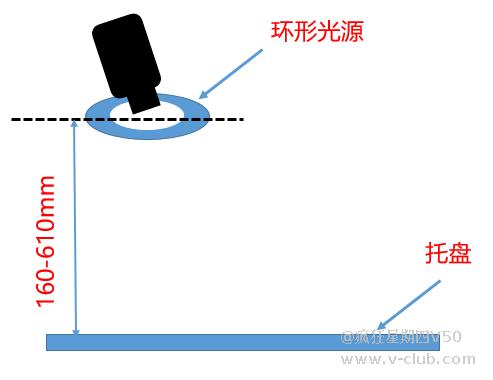
配合AGV小车,大景深下(450mm景深,160-610mm工作距离)读取四种底色的托盘码,将码信息发送上位机控制小车进行不同的分流作业操作。



1.2项目难点
(1)大景深,基线相机无法适应
(2)多底色用同一光源,打光质量参差
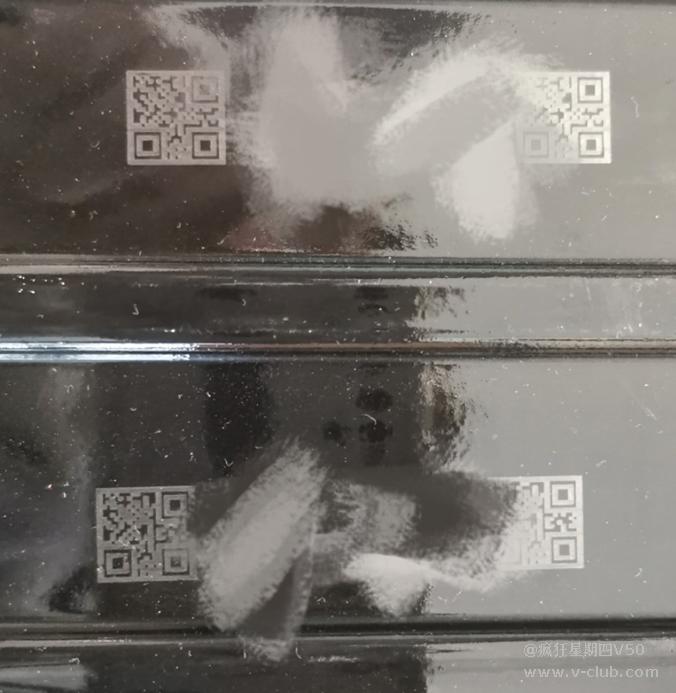
(3)码颜色多样化,同背景色难以区分,成像质量一般
二、方案描述
2.1项目配单表
|
物料 |
型号 |
数量 |
|
相机 |
MV-ID2016M-16T-RBN(定制版本) |
1 |
|
光源 |
MV-LRDS-120-90-W |
1 |
2.2方案示意图
2.3方案思路与描述
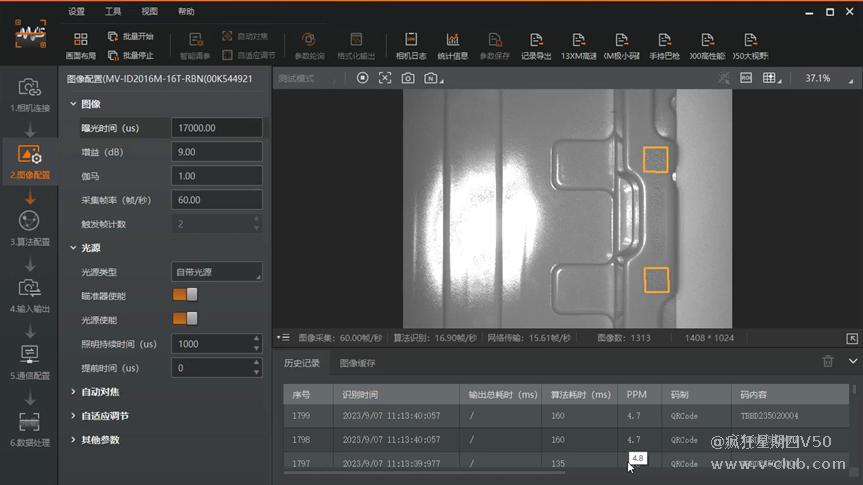
针对大景深和长工作距离要求,采用定制型号相机,满足需求;由于该相机是红光光源,红光下红色托盘呈白色,和白色码冲突,故选用外接光源;针对托盘材质反光、成像一般等问题,采用倾斜架设降低干扰
三、效果展示

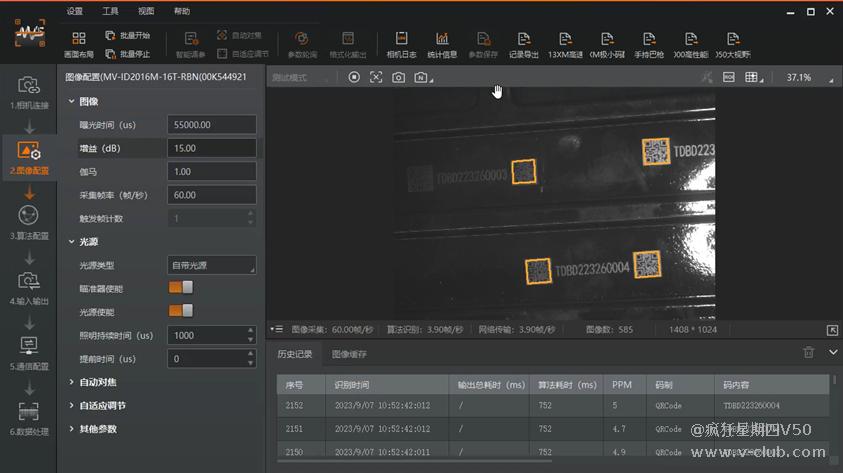
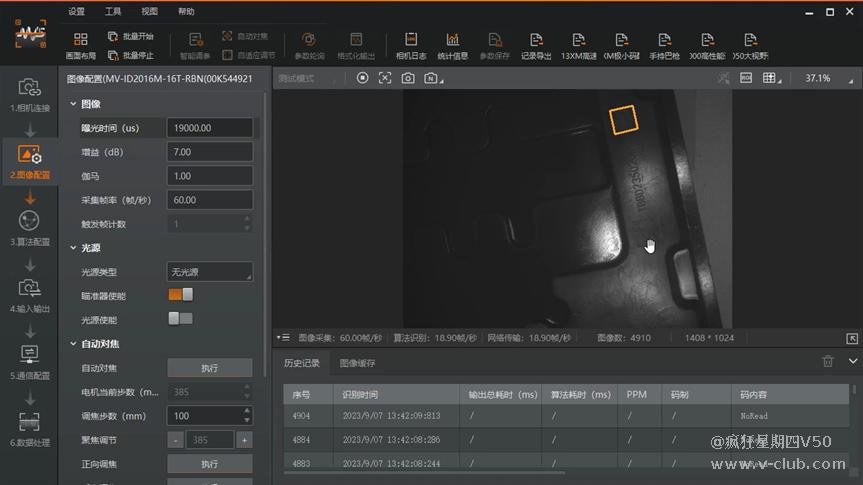
识别稳定,漏读率不足0.2%
五、方案优势
1、固态高速对焦调节, 快速切换工作距离, 稳定性高, 适用于产线混线生产
2、外接光源照明,经实测读码效果较相机自带红光有大幅提升
3、单相机配合单光源即可完成信息识别,方案简单,节省现场空间,成本较低。
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
上一篇

下一篇
已经是最后一篇啦~
评论请先登录 登录
全部评论 0


相关阅读
 工业读码器之ModbusTCP通讯协议2026-04-21
工业读码器之ModbusTCP通讯协议2026-04-21 巅峰对决启幕!第四届启智杯机器智能大赛决赛入围名单暨优胜奖项公告2026-04-24
巅峰对决启幕!第四届启智杯机器智能大赛决赛入围名单暨优胜奖项公告2026-04-24 通过socket将图片传输到vm外部2026-05-09
通过socket将图片传输到vm外部2026-05-09- 项目实施过程中关于对标的思路及经验分享2026-05-09
- 移动机器人技术分享-26年5月2026-05-15
 浙公网安备 33010802013223号
浙公网安备 33010802013223号