



会通讯,成功一半
5篇
- 浅谈visionMaster 通讯的应用(非常好用)
- 西门子S7SMART200与VM通讯
- VM_ModbusTCP通讯
- VM和西门子S7的通讯说明
- ID6000通讯方式之FTP详细说明
VM软件配置,新建modoubs通信,填写PLCIP:192.168.1.10,勾选自动重连。建立触发地址占用PLC的VW0,建立结果回传地址,占用PLC的VW2-VW9.

建立接收事件

建立发送事件

触发配置

PLC配置IP为192.168.1.10,必须和VM中设置的一样,否则通讯不上。

PLC程序,建立modbus服务器指令。

结果确认,通过发送数据,将结果数据上传
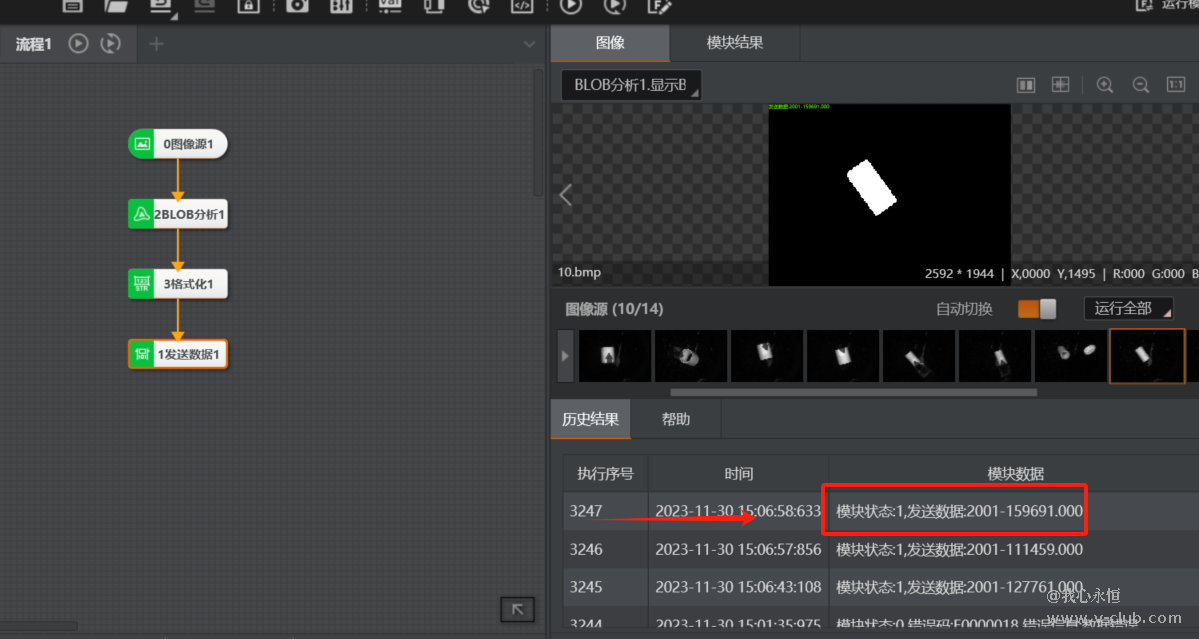

通过触发指令M2.0,给对应地址VW0写入12触发命令;VM接收到触发命令12,通过接收事件解析数据,产生事件,并且反馈数据,将该地址数据清零,否则就会一直产生事件执行。在全局触发中,配置触发事件,触发流程执行,反馈结果。




 浙公网安备 33010802013223号
浙公网安备 33010802013223号