


- 探寻机器视觉新星|第二届“启智杯”机器视觉设计大赛获奖名单公布
- 第二届启智杯-666队
- 第二届启智杯——光伏电池片质检方案设计
- 第二届启智杯应用类-光伏电池片质检视觉方案设计
- 第二届启智杯—光伏电池片质检视觉方案设计-我恨月亮队
- 第二届启智杯-光伏电池片质检视觉方案设计
- 第二届启智杯—光伏电池片质检视觉方案设计
- 第二届启智杯——锂电外壳表面缺陷检测的3D视觉方案
- 第二届启智杯--能实现标准件检测的双目视觉系统设计
- 第二届启智杯--能实现标准件检测的双目视觉系统设计
- 第2届“启智杯”设计大赛——一种锂电外壳外观检测3D视觉方案
- 第二届启智杯-锂电外壳外观检测3D视觉方案设计
- 第二届启智杯-锂电外壳外观检测3D视觉方案设计
- 第二届启智杯—锂电外壳外观检测3D视觉方案设计
- 第二届启智杯-无监督异常检测算法
- 第二届“启智杯”设计大赛-能实现标准件检测的双目系统设计
- 第二届启智杯-创意赛道-众智队-能实现标准件检测的双目视觉系统设计
- 第二届启智杯--能实现标准件检测的双目视觉系统设计
- 第二届“启智杯”设计大赛-能实现标准件检测的双目系统设计
- 第二届启智杯--能实现标准件检测的双目视觉系统设计
- 第二届“启智杯”可视化流程编辑器-基于坐标变换实现整体框架
- 第二届启智杯-一个可视化流程编辑器
- 第二届启智杯-一种可视化流程编辑器
- 第二届启智杯——节点数据订阅设计
- 第二届启智杯-无监督异常检测算法
- 《第二届启智杯-试一试队-算法赛道-无监督异常检测算法》
- 第二届启智杯-小样本计数算法
- 第二届启智杯-小样本计数-新疆核桃小队
- 第二届启智杯-小样本计数-海康正式员工队
- 第二届“启智杯”算法赛道-小样本计数算法设计报告-态度诚恳队
第二届启智杯-创意赛道-众智队-能实现标准件检测的双目视觉系统设计
- 0
- 0
- 分享
- 2024-04-29 09:33
面向具有一定尺寸标准件的检测和尺寸测量时,单视角成像无法获取标准件完整图像的问题,提出双目视觉的技术方案,在同步触发采集两个相机的图像后,采用拼接算法获取双视角拼接后的标准件完整图像,进而在图像中实现标准件检测。利用相机标定技术,获得了标准件的尺寸测量结果。项目开发了标准件检测与测量软件平台,可实时显示双目图像,以及拼接和检测、测量结果等,具有良好的人机交互性。本项目面向工业流水线上大尺寸标准件的自动检测、尺寸测量、自动分拣等场景而开发,通过机器视觉技术的进一步完善,可满足快速、高效、高精度的应用需求。
依托于启智杯的举办,团队依靠VM工业软件,参与创意类赛道中能实现标准件检测的双目视觉系统设计,感谢指导老师的悉心指点和本次大赛为我们提供的成长机会。
1、项目开发背景
在智能制造中,利用视觉技术检测工件是智能化生产的重要应用。其中, 矩形工件是工业生产中最常见的工件类型,快速、准确地检测出图像中的矩形具有十分广泛的应用价值, 例如:机器人的自动码垛、工业产品的缺陷检测等;
在面向具有一定尺寸标准件的检测和尺寸测量时,有着单视角成像无法获取标准件完整图像等问题,由此我们提出了双目视觉的技术解决方案。
2、项目开发设计思路
(1)双目系统搭建

双目系统设计图
选取hikrobot的CB系列板级相机MV-CB013-A0UC-C和镜头MVL-HF0628M-6MPE,选用黑色、黄褐色等五种不同尺寸的标准件,利用两个105cm高的支架,物距为70cm,两相机间距约为19cm,传送带速度为3m/min。

双目系统实际图
(2)相机同步触发性检验
在传送带上放置一个秒表,确保两相机采集图像中均能完整显示秒表数字,一次取流并比较左右相机视角下秒表的数字,若时间差在5ms之内,即可验证相机的同步触发性。


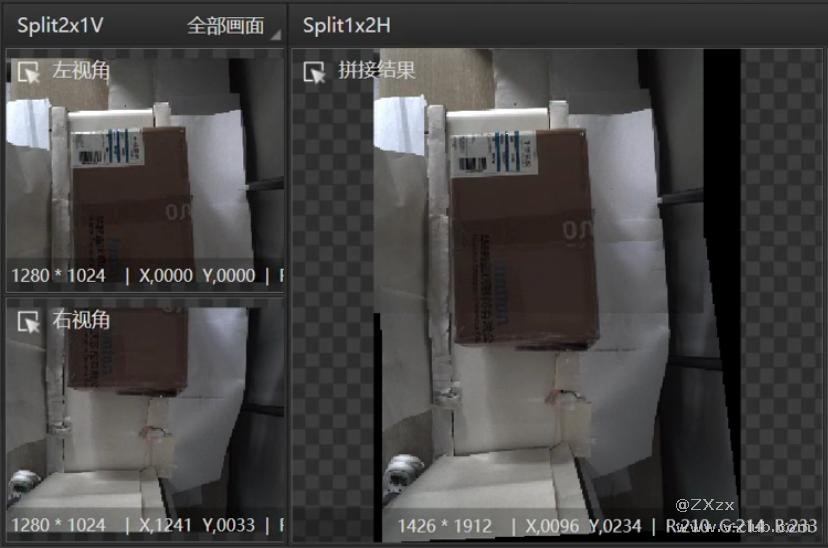
(3)双目数据图像取流与双目拼接
实时取流获取两相机视野下的标定板图像,进而实现特征检测、特征提取、特征匹配与图像融合,以建立多来源拼接模型;在同一环境与视野下,撤掉标定板,实现两相机视野下图像的对齐和连接,并将拼接后的图像实时输出显示在PC端。




(4)矩形检测和框选
通过颜色转换、图像增强、图像滤波、形态学分析、BLOB分析与变量计算依次实现了RGB图像转灰度图像、提升图像对比度使图像边缘清晰、去除噪声并保留矩形结构、清除小噪点并细化矩形边缘、筛选符合矩形特征的区域以及根据标准件像素尺寸计算真实尺寸的功能。



(5)交互界面设计:
最上区域显示本参赛系统名称“双目视觉标准件检测与测量系统”;视图分为三部分,最左一列显示左右视角下的双目数据流,中间显示拼接后的图像,最右一列显示标准件检测框选后的图像;左下角设置一次取流与多次取流的按键;右下区域实时显示标准件像素尺寸、实际尺寸(以mm为单位)以及双目检测系统的帧率。

3、项目开发总结
团队成员通过本次海康启智杯比赛,共同合作,学习了VM工业软件的使用并完成了整套双目视觉标准件检测与测量系统的搭建。尽管最终搭建好的成果比较粗糙且有很多地方可以优化,但对于我们来说这是一次宝贵的成长经历。
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
评论请先登录 登录
全部评论 0

所属专题
相关阅读
 【形状匹配算法系列】从NCC到轮廓匹配:工业视觉的"定位之争",到底争的是什么?2026-05-19
【形状匹配算法系列】从NCC到轮廓匹配:工业视觉的"定位之争",到底争的是什么?2026-05-19 【技术分享】VM运行界面之清空图像2026-06-10
【技术分享】VM运行界面之清空图像2026-06-10 使用VM算法识别屏幕2026-06-05
使用VM算法识别屏幕2026-06-05 认证刷题与模拟考试系统2026-06-12
认证刷题与模拟考试系统2026-06-12- 移动机器人工程师培训与认证安排-26年6月2026-05-18
 浙公网安备 33010802013223号
浙公网安备 33010802013223号