关于Q3潜伏车举升盘无法人工扭动回正的案例
- 0
- 0
- 分享
- 2024-08-12 09:27
当现场小车发生异常举升盘无法回正和人工恢复时,可以用以下指令尝试对小车举升盘重新标定
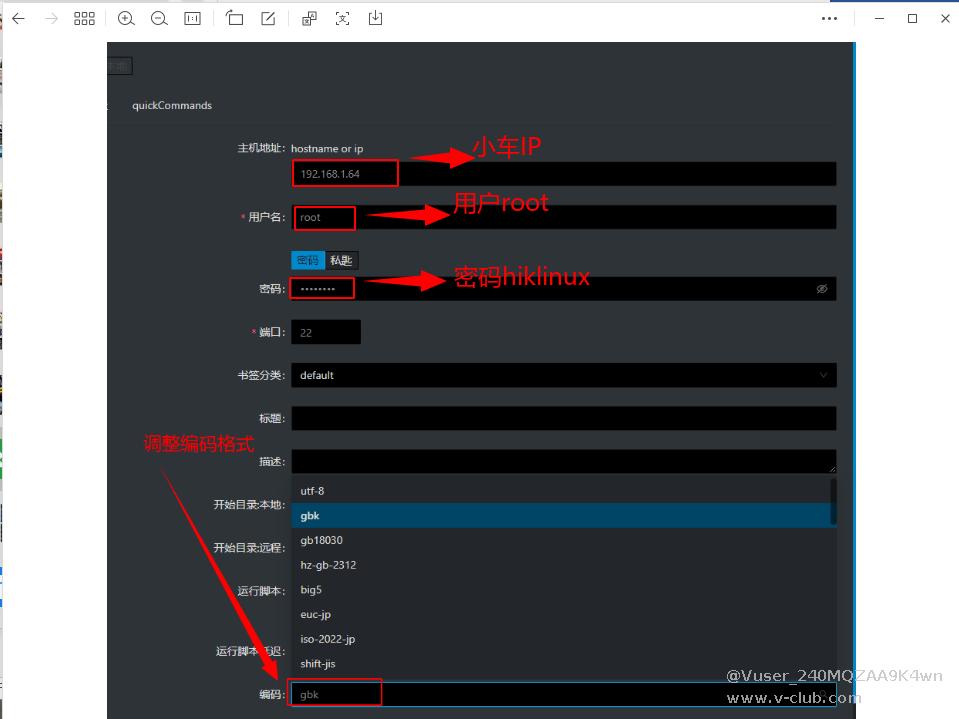
1.遇到Q3潜伏车(4.0)举升盘(蜗轮蜗杆)倾斜前后拍急停无法扭动举升盘,或者用mvcc进行举升盘标定前后拍急停扭不动举升盘时可以敲以下指令使举升盘微调,使用electerm软件登录小车(记得调整编码格式)
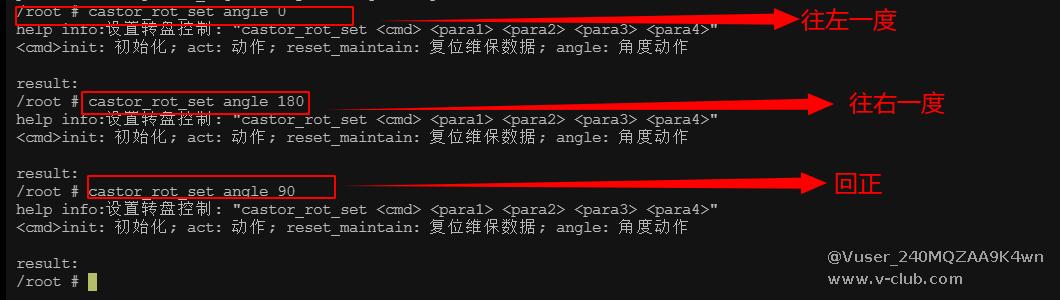
2.举升盘微调指令castor_rot_set angle 0 向左微调一度;castor_rot_set angle 90 回正;castor_rot_set angle 180 向右微调一度
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
上一篇
评论请先登录 登录
全部评论 0


相关阅读
 话术-用AI协助编写VM3D脚本模块的代码2026-06-29
话术-用AI协助编写VM3D脚本模块的代码2026-06-29 基于基础应用扩展的偏心抓取算法2026-07-07
基于基础应用扩展的偏心抓取算法2026-07-07 更换主控具体需要准备哪些工具和文件?2026-07-23
更换主控具体需要准备哪些工具和文件?2026-07-23- 移动机器人技术分享-26年7月2026-07-17
 浙公网安备 33010802013223号
浙公网安备 33010802013223号