- 0
- 0
- 分享
- 2025-03-27 11:57
一、振动介绍
1、振动的产生
振动的定义:振动是由物体在受到激励后,在其平衡位置附近进行的往复运动,并且会将振动传递给其他介质
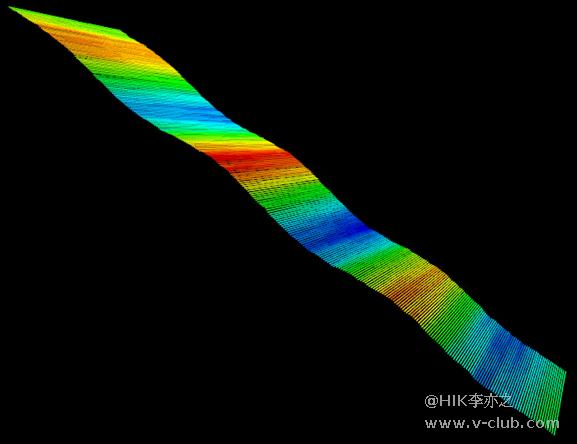
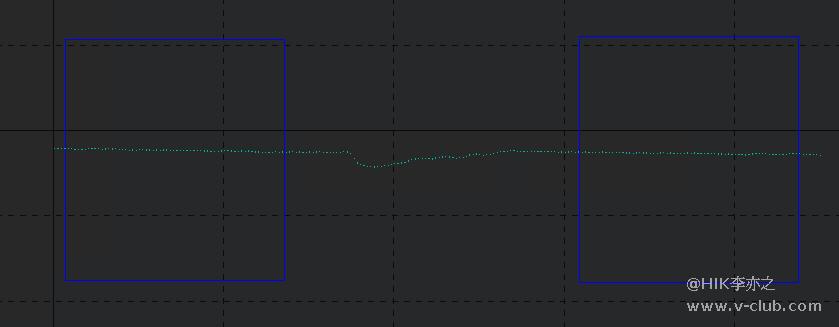
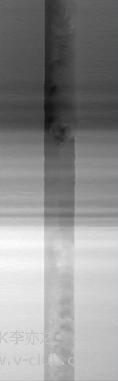
当振动传递到相机或物料时,相机与物料的相对位置就会发生轻微变化,比较严重的体现在图像上就是会出现“波浪纹”,进而影响测量数据或者无法确定缺陷检测的基准,如下图所示:

振动在工业上是一种无法避免的对测量精度产生影响的干扰源,各位在项目中遇到此现象,应该先对环境做排查;没有办法或没有效果的情况下,再使用本文后续介绍的四种方法。
另外本文介绍的方法也只能一定程度降低振动带来的影响,无法完全去除振动,这点需要注意!
二、振动补偿
1、优化取点
第一个是优化取点,以下图为例,当取点位置是包含Y坐标相同的轮廓时,数据表现会远优于在不同Y坐标取点
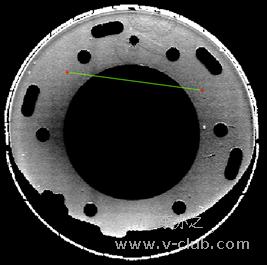

这两组是取点不在同个Y坐标,可以看到受振动影响,重复精度已近一个丝(具体图像振动的细节,可以下载方案图片观察,这里为了优化篇幅不做展示)


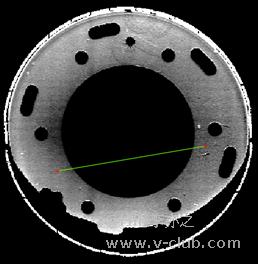
这两组是取点在同个Y坐标,重复精度在2um以下,所做的仅仅是调整了测量ROI的坐标
2、振动补正
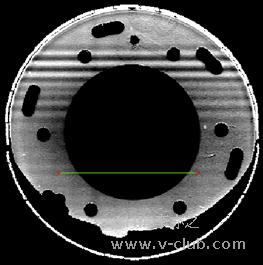
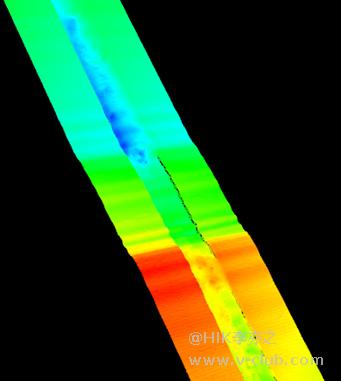
振动补正以选定的轮廓为基准,根据ROI内数据确定旋转和平移量,将其他行的轮廓矫正至基准轮廓的位姿

补正前图像如下:
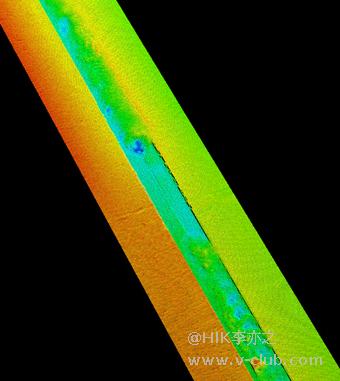
补正后图像(同个区域)如下:

3、平面补正
平面补正以选定的参考平面为基准,矫正深度图与参考平面保持平行,去除Y方向抖动

下面是补正前后图像对比


优化前后平面度重复精度如下:

4、差分补正
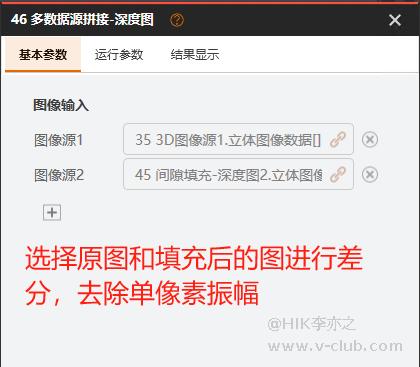
差分补正不是单个模块的功能,而是根据不同模块的组合搭配来达到去除振动干扰的效果
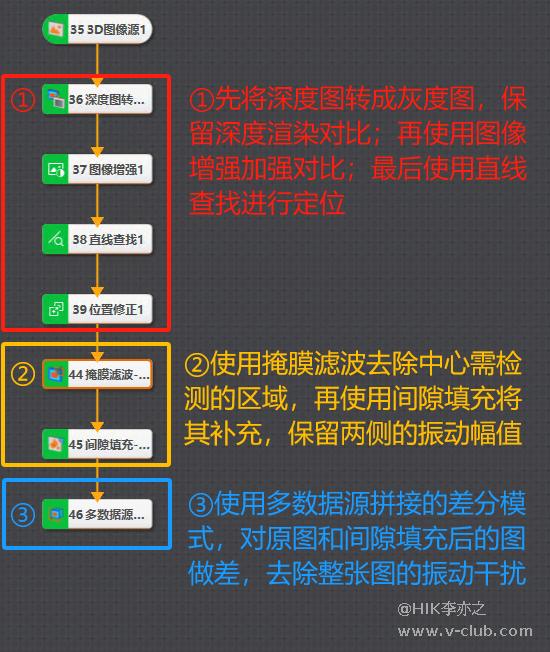
以下分别为过程图像:
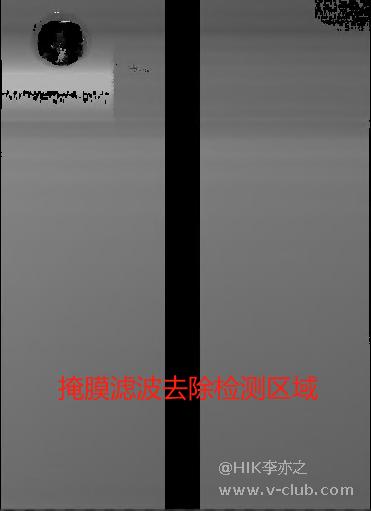
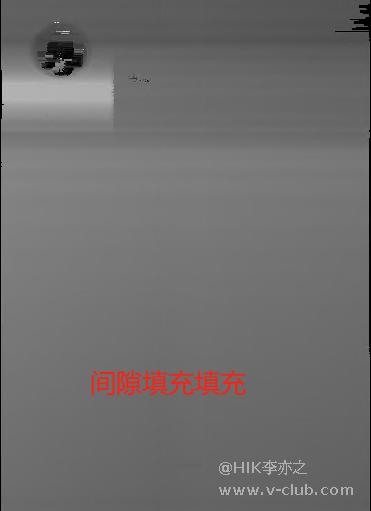
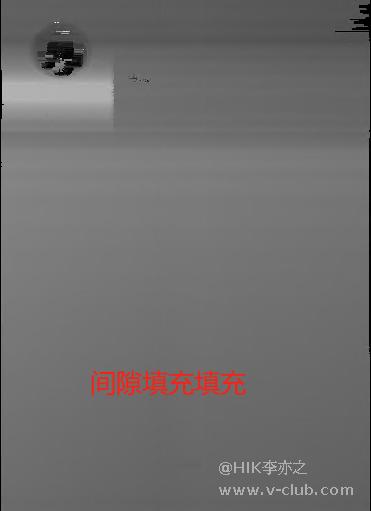
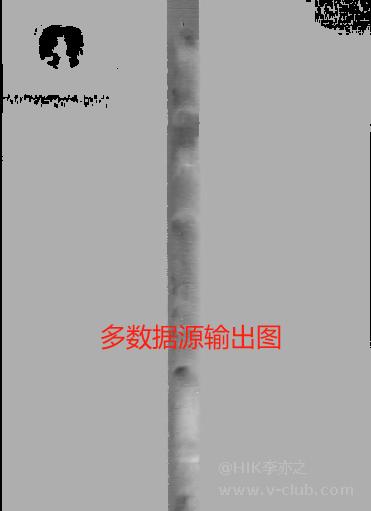
具体思路是保留需要检测缺陷的部分,并用间隙填充保留每行轮廓的振动幅值,通过对整幅图片做差的方式,去除振动干扰
三、总结
优化取点和差分补正都是基于应用方面想出的方案,而振动补正和平面补正则是海康算法给出的方案,大家有别的好的想法欢迎分享
PS:本文章展示的方案均是基于VM3D的2.3版本(非官网版本)构建,如需使用请联系海康机器人技术支持同事获取试用版本。文章中的方案和图片请用如下链接下载:https://drive.ticklink.com/hcs/controller/hik-manage/fileDownload?link=GvjV4f9n



 【技术分享】VM运行界面之清空图像2026-06-10
【技术分享】VM运行界面之清空图像2026-06-10 PoeLink-AI实施小助手2026-06-18
PoeLink-AI实施小助手2026-06-18 拒绝踩坑!海康读码器串口通讯全链路实战:从硬件接线到触发指令配置2026-06-16
拒绝踩坑!海康读码器串口通讯全链路实战:从硬件接线到触发指令配置2026-06-16 使用VM算法识别屏幕2026-06-05
使用VM算法识别屏幕2026-06-05- 认证刷题与模拟考试系统2026-06-12
 浙公网安备 33010802013223号
浙公网安备 33010802013223号