- 0
- 0
- 分享
- 2025-07-08 16:21
关于任务搬运货架后点位是否刷新地图排查方法
一、 确认对应的任务号、货架号、坐标(以下根据现场实际问题反馈排查)
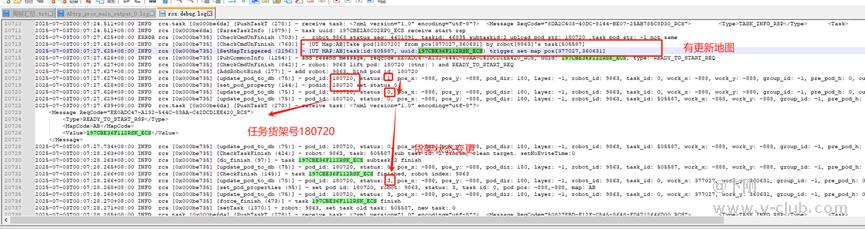
1、 现场反馈子任务197CBE36F112RSK_ECS success, task id: 505587完成后起点货架没有刷空,
2、 根据任务号,排查对应RCS日志,确认时间、货架号和起点坐标
A、时间:2025-07-03T00:06:09.585+08:00
B、子任务号:197CBE36F112RSK_ECS
C、起点坐标:<Pod x="377027.0" y="360631.0">

3、 查看RCS日志,确认对应货架号
A、对应任务货架号:180720
B、货架状态1-0-3状态变更
C、有刷地图反馈:
2025-07-03T00:07:27.625+08:00 INFO rcs [0x000be735] [CheckCmdUnFinish (763)] - [UT Map:AB]Take pod[180720] from pos[377027,360631] by robot[9863]'s task[505587]
2025-07-03T00:07:27.625+08:00 INFO rcs [0x000be735] [SetMapTriggered (2196)] - [UT MAP:AB]task[id:505587, uuid:197CBE36F112RSK_ECS] trigger set map pos[377027,360631]
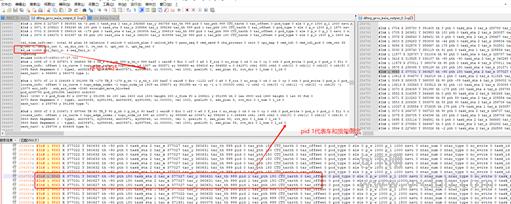
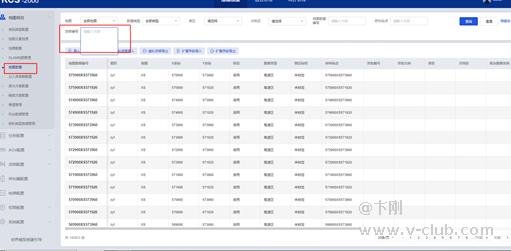
4、 查看规划库日志,确认刷新地图是刷满还是刷空
A、 查看规划库日志、确认小车举升货架对应的debug_num:11435
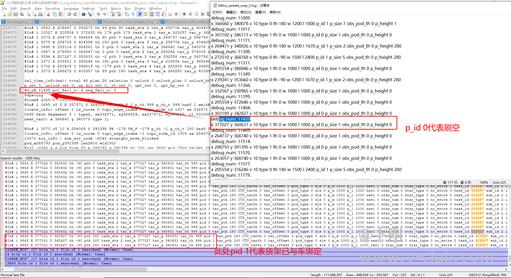
B、 查看规划库日志update_map对应日志中序号状态 p_id 0代表储位刷空
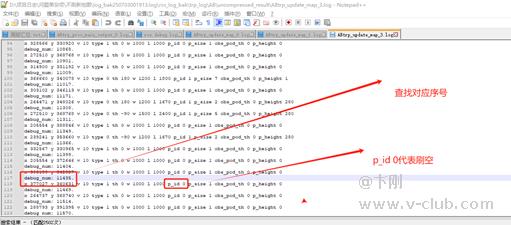
C、 以下为排查图片显示
5、 待现场问题复现时、排查地图数据,查找对应起点坐标看是否有货架绑定状态
二、 总结
1、 若是规划库日志中排查没有刷地图或者没刷空信号找对应的RCS排查
2、 若是RCS排查刷地图正常,但是任务离开储位后仍显示有货架信息则需要找cms同事排查


 【形状匹配算法系列】从NCC到轮廓匹配:工业视觉的"定位之争",到底争的是什么?2026-05-19
【形状匹配算法系列】从NCC到轮廓匹配:工业视觉的"定位之争",到底争的是什么?2026-05-19 项目实施过程中关于对标的思路及经验分享2026-05-09
项目实施过程中关于对标的思路及经验分享2026-05-09- 移动机器人常识2026-05-15
 通过socket将图片传输到vm外部2026-05-09
通过socket将图片传输到vm外部2026-05-09- 移动机器人技术分享-26年5月2026-05-15
 浙公网安备 33010802013223号
浙公网安备 33010802013223号