- 0
- 2
- 分享
- 2025-11-05 16:50
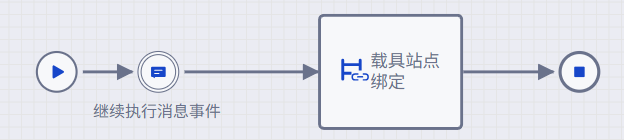
循环任务大多用到像展会之类的需要稳定跑循环的场景中,指定次数的循环技术分享会已经介绍过了,这里不再多嘴= = 这里只介绍无限循环的配置方法。
我们以某展会的CTU的循环场景为例,假设CTU的循环路线为路线如下(初始状态下层为满,高层为空)

那么可以知道基本节点为4个平层搬运,实现四个搬运,1、2将料箱从下层搬运到高层,3、4将料箱从高层搬到底层回到初始状态,然后进行下一轮循环。模板如下:

这里的循环任务涉及到四个点位,所以下发任务需要给四个点位,R1-R4分别对应右下、左下、左上、右上四个仓位。

接下来看看平层搬运的点位设置----
平层搬运1:起点接口参数1,终点接口参数3
平层搬运2:起点接口参数2,终点接口参数4
到这里关键点就来了,因为我们前面两个平层搬运都是两个料箱的第一次搬运,已经申请到载具并且知道了载具的实际位置,我们后面两个平层搬运也只是复用载具对象,所以不必再次申请载具,直接使用前序节点输出的载具对象。我们每一个平常搬运输出的载具对象名称默认都是carrier,终点仓位都是slot,所以我们这里需要用到不同节点的载具和站点,所以需要区分一下
一定要先修改节点输出再去配置平层搬运3、4的点位信息(参照下文将carrier分别改为carrier1、carrier2…)
平层搬运3:起点是前序节点输出的载具变量(carrier2),终点是接口参数2
平层搬运4:起点是前序节点输出的载具变量(carrier1),终点是接口参数1
修改第一个平层搬运的输出,carrier改为carrier1,slot改为slot1

同理,第二个平层搬运carrier改为carrier2,slot改为slot2,第三个…
最后一个节点脚本逻辑用于去复制原始参数生成新的任务单,如果没有生成成功当前任务就不会结束,但是当前任务不结束,任务就会卡在第四个平层搬运,carrier4,slot4就不会被释放,陷入死循环了,所以我们需要手动释放一下,加入释放载具和释放站点


下面就是重头戏了,我们的脚本逻辑!把下面这一长段复制进行就ok了,这里任务下发了四个点位,所targetRouteList.add()方法调用了四次,用于去复制四个点位,如果只有两个点位,那就只用保留两次调用就可以了。
import robot.glory.tas.frame.model.task.dto.param.SubmitParam;
import robot.glory.tas.frame.model.task.dto.TargetRoute;
import robot.glory.framework.util.UuidUtil;
import robot.glory.tas.frame.msg.gbt.service.GbtTaskService;
import robot.glory.framework.core.context.SpringContext;
import java.util.List;
import com.google.common.collect.Lists;
SubmitParam submitParam = (SubmitParam)execution.getVariable(“submitParam”);
SubmitParam param = new SubmitParam();
String uuid = UuidUtil.genUuid();
param.setRobotTaskCode(uuid);
param.setHeaderParam(submitParam.getHeaderParam());
List < TargetRoute > targetRouteList = Lists.newArrayList();
targetRouteList.add(submitParam.getTargetRoute().get(0)); //复制第一个点
targetRouteList.add(submitParam.getTargetRoute().get(1)); //复制第二个点
targetRouteList.add(submitParam.getTargetRoute().get(2)); //复制第三个点
targetRouteList.add(submitParam.getTargetRoute().get(3)); //复制第四个点
param.setTargetRoute(targetRouteList);
param.setTaskType(submitParam.getTaskType());
param.setInitPriority(submitParam.getInitPriority());
param.setExtra(submitParam.getExtra());
param.setRobotCode(submitParam.getRobotCode());
param.setRobotType(submitParam.getRobotType());
param.setDeadline(submitParam.getDeadline());
param.setInterrupt(submitParam.getInterrupt());
param.setGroupCode(submitParam.getGroupCode());
param.getHeaderParam().setRequestId(uuid);
GbtTaskService gbtTaskService = SpringContext.getBean(“gbtTaskService”);
gbtTaskService.doSubmit(param);
param
PS:指定次数循环的配置方法:https://www.v-club.com/home/article/9952



 【技术分享】VM运行界面之清空图像2026-06-10
【技术分享】VM运行界面之清空图像2026-06-10 PoeLink-AI实施小助手2026-06-18
PoeLink-AI实施小助手2026-06-18 使用VM算法识别屏幕2026-06-05
使用VM算法识别屏幕2026-06-05 认证刷题与模拟考试系统2026-06-12
认证刷题与模拟考试系统2026-06-12 全国总决赛获奖名单公布!第四届“启智杯”机器智能大赛大奖花落谁家?2026-05-29
全国总决赛获奖名单公布!第四届“启智杯”机器智能大赛大奖花落谁家?2026-05-29
 浙公网安备 33010802013223号
浙公网安备 33010802013223号