


- 线阵相机及镜头选型方法简介
- 线阵工业相机的曝光、行频与帧率的关系
- 线阵相机触发成像起始波动问题的定位方法
- 线阵产品成像局部拉伸压缩解决方法
- 线阵工业相机的分倍频操作
- 线阵产品不定行高使用方式介绍
- 线阵工业相机平场(PRNUC)矫正步骤说明
线阵工业相机的分倍频操作
- 0
- 1
- 分享
- 2022-09-08 10:02
通过本文,能够了解海康线阵工业相机的分倍频的计算及操作方式
一、 分倍频介绍
分倍频主要是对编码器信号的行频进行运算处理,从而匹配物体速度,参数介绍如下

表1 分倍频参数表
|
代号 |
参数名称 |
含义 |
|
A |
Trigger Line Rate |
外部编码器信号输入行频 |
|
B |
PreDivider |
预分频器,对外部信号行频做除法 |
|
C |
Multiplier |
乘法器,对外部信号行频做乘法 |
|
D |
PostDivider |
后分频器,对外部信号行频做除法 |
|
E |
Resulting Trigger Line Rate |
分倍频后实际给到sensor的触发行频 |
Trigger Line Rate和Resulting Trigger Line Rate仅部分相机型号支持,具体以实际相机参数为准。在不超行频的情况下,相机实际出图行频为E,E=A×C/BD,超行频时,相机实际出图行频小于E。
根据拉伸降行频、压缩增行频的原理,拉伸时调节预分频器或后分频器,压缩时调节乘法器。为了图像行频匹配精度更高,通常除法器和乘法器需要搭配使用,通过以下示例展示分倍频调节过程。
二、分倍频设置
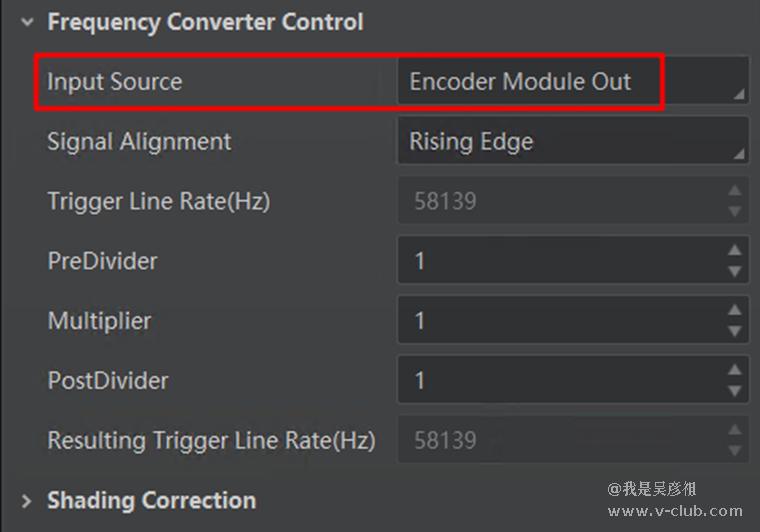
2.1 Input Source选择Encoder Module Out,如下图:
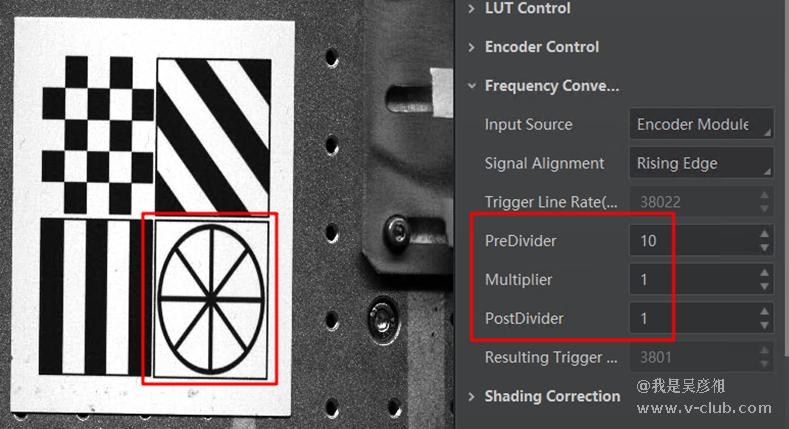
2.2 拍摄一个圆形图案,按照拉伸增大预分频器,压缩增大乘法器的方式,将图像大致调成圆形。如果对行频精度要求不高,可以重复此步骤,直到把图案调成圆形,无需后续计算。
2.3 保存图片使用画图打开,图片放大后过圆心做狮子标线,取十字标线于图案外圆的4个顶点,分别记录4个顶点的横纵坐标。

2.4 计算分倍频参数,计算过程如下:
1) 压缩比=(c的横坐标- a的横坐标)/(d的纵坐标- b的纵坐标)=(4886-3907) / (3124-1754)=0.72
2) 分倍频系数=当前分倍频系数*压缩比=(1/10)*0.72=0.072
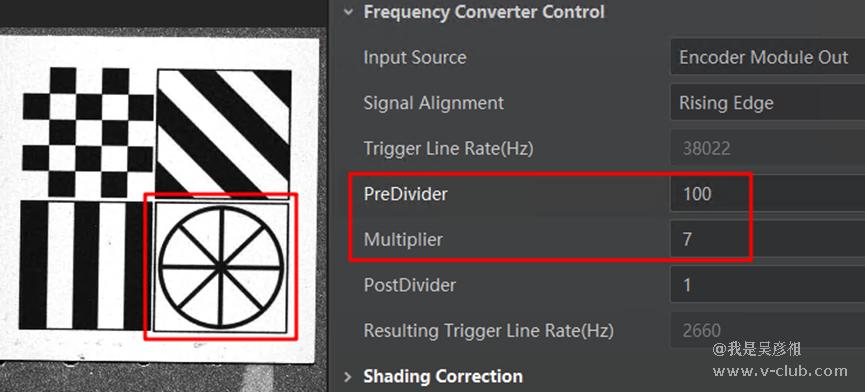
3) 因为分倍频系数为0.072,取0.07,0.07=7/100,所以取乘法器为7,预除器为100。
2.5 将计算得到的分倍频值填入相机参数,取图呈圆形,分倍频设置完成。
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
下一篇
评论请先登录 登录
全部评论 1

- 1

所属专题
相关阅读
 【技术分享】VM运行界面之清空图像2026-06-10
【技术分享】VM运行界面之清空图像2026-06-10 PoeLink-AI实施小助手2026-06-18
PoeLink-AI实施小助手2026-06-18 使用VM算法识别屏幕2026-06-05
使用VM算法识别屏幕2026-06-05 认证刷题与模拟考试系统2026-06-12
认证刷题与模拟考试系统2026-06-12 全国总决赛获奖名单公布!第四届“启智杯”机器智能大赛大奖花落谁家?2026-05-29
全国总决赛获奖名单公布!第四届“启智杯”机器智能大赛大奖花落谁家?2026-05-29
 浙公网安备 33010802013223号
浙公网安备 33010802013223号