- 0
- 0
- 分享
- 2022-10-17 20:04
一.架设方案介绍
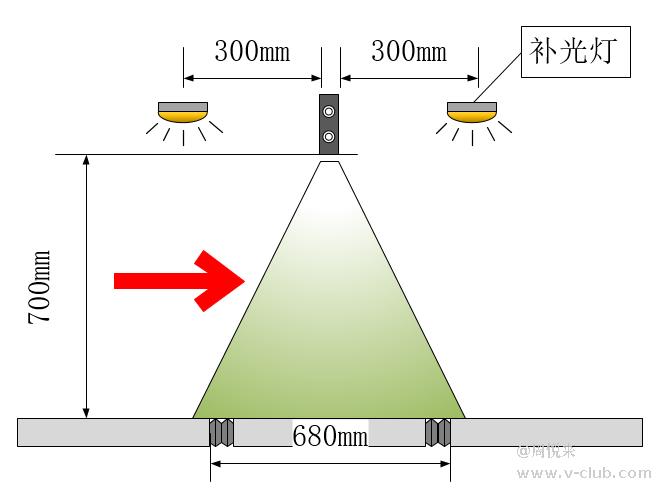
本方案架设示意图为单相机标准方案示意。
视野覆盖情况:
底部视野范围:890mmx680mm
架设高度:通常为700mm,可根据小车实际盘面大小计算

注意:
1.设备环境搭建需要增加遮光帘等类似遮光设备。避免阳光直射及其他光干扰。
2.设备架设需增加LED灯补光设备,使RGB-D智能立体相机获取图像时光照更均匀。灯条架设示意如左图所示。
3.安装EDP必须使用千兆的网线、交换机和网口,不然会导致相机异常丢包或丢帧。
二.参数配置
1.常规参数配置
①选择Scan Control,其中,Working Mode一栏选择EDP Detect;
②选择Sensor control子属性栏,将Image Mode改为Mono Image;
③Binning Selector:2x2即为开启binning模式,未开启显示为off。欣巴协议建议使用全分辨率,binning off;科捷协议建议使用binning模式;
④RGB Jpeg Enable:使能开启;
⑤帧率设置:调试持续取流模式下建议设置20帧,触发模式使用建议设置30帧;
⑥曝光时间:1500us;
⑦增益:15;
⑧gamma值:0.7;
此成像参数为单一试验场地测试得出,具体图像参数需按照实际调节
2.chunk参数设置
①选择Scan Control,其中,Working Mode一栏选择EDP Detect;
②选择Chunk Data Control子属性栏,将Chunk Mode Active使能;
③Chunk Selector:
选择Image,打开Chunk Enable使能;
选择RGB Image,打开Chunk Enable使能;
选择 Instance Segemention ,打开Chunk Enable使能。
3.触发参数设置
(1)软触发:
①触发模式Trigger Mode :On;
②触发源Trigger Mode:软触发Software;
③触发延时Trigger Delay:根据PLC给出触发指令时间进行微调,一般不设置。
(2)硬触发:
①触发模式Trigger Mode :On;
②触发源Trigger Mode:根据现场IO接口选择,通常使用Line0 ;
③触发延时Trigger Delay:根据PLC给出触发指令时间进行微调,一般不设置。
④消抖线路选择Line Debouncer Selector:选与触发源相同的接口
⑤线路防抖时间Line Debouncer Time:单位为us,通常设置为3000,可根据现场实际情况进行调整
4.通讯参数配置
(1)软触发:
① Commumication Select:选择 EDP Transport;
② EDP Message Type Select:欣巴协议选择Original Position;科捷协议选择Package Status;
③ EDP Transport Port:相机做服务端,该端口号需要与客户实际使用确认;
④ EDP Transport Enable:选择使能。
(2)硬触发:
① Commumication Select:选择 TCP Server;
② EDP Transport Port:相机做服务器,该端口号需要与客户实际使用确认;
③ EDP Transport Enable:打开使能。
5. 用户参数保存
①选择用户1 ,即User Set 1;
② 点击保存 ;
③ 设置默认启动用。
三.触发调节
调节PLC的触发时间,确保相机每一帧拍摄时,小车都稳定保持在视野中间
四.绘制ROI
①3DMVS客户端选择断连相机,打开EDP客户端;
② 存图配置-对接协议内下拉选择相应的通讯协议;
③ 点击“枚举设备”,获取当前设备可连接相机;
④ 点击【打开设备】,开启交叉带,待交叉带运行稳定后再进行下一步操作;
⑤ 点击“ROI设置”,选中“清除ROI”后客户端原有的ROI框即会清除。此时需要按照当前相机视野进行小车的ROI绘制;
⑥ 若为科捷协议,需绘制小车盘面及前后两个风琴罩的ROI,共三个;若为欣巴协议,需绘制小车盘面及前后其中一个风琴罩ROI,不管何种协议,均需先绘制小车盘面ROI,再绘制风琴罩ROI。绘制小车盘面选择:“0:输出角点坐标”。绘制风琴罩选择:“1:输出包裹有无”;
⑦ 完成绘制后,点击“设备控制”→“上传ROI”即完成ROI的绘制。

五.系统标定
1.标定布/板放置
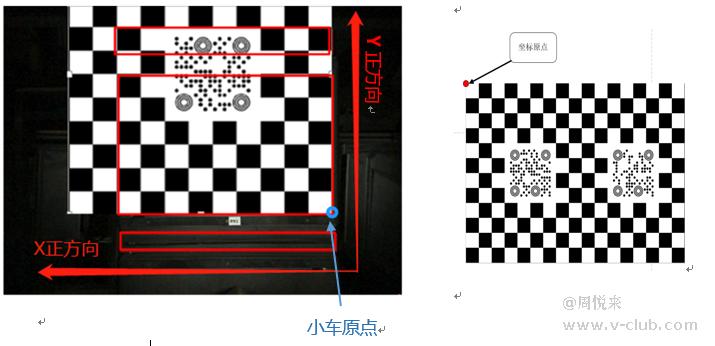
①关闭触发,打开EDP客户端,在绘制好的小车盘面ROI处铺设标定布/板;
②以运行垂直方向做X方向,运行方向做Y方向,将标定布/板原点与小车原点对齐摆放,如下图所示:
2.系统标定
①关闭EDP客户端,使用3DMVS连接相机;
② 点击左侧属性栏“相机标定”,再点击“标定”;
③ 点击“取图”,获取标定图片;
④ 点击“绘制ROI”,在下方图像框内绘制蓝色ROI框,此蓝色框需要包含整个小车及风琴罩。如下图示意:
⑤ 点击下一步,进入标定数据界面;

⑥ 棋盘格大小按照对应格宽填写;
⑦ 填写偏差量数值。偏差量为标定布坐标原点与小车原点的偏差值,在对齐的情况下均为0,若未对齐,则需要量取标定布/板原点与小车原点偏移量,单位:mm;
⑧ 点击“开始标定”,系统会自动进行相机的标定并生成数据。
3.算法参数配置
①点击Detect Range Selector。此节点代表要选择的限制解算区域的方向,一般只对X,Y方向进行设置;
②Min Detection Range代表解算限制范围最小值,即X,Y,Z区域范围的最小值,可为负数;
③Max Detection Range代表解算限制范围最大值,即X,Y,Z区域范围最大值;

④Pkg Area Filter Threshold:包裹边界面积阈值,单位mm²,可设置包裹处于框内达到规定面积判断为有效



 话术-用AI协助编写VM3D脚本模块的代码2026-06-29
话术-用AI协助编写VM3D脚本模块的代码2026-06-29 基于基础应用扩展的偏心抓取算法2026-07-07
基于基础应用扩展的偏心抓取算法2026-07-07 更换主控具体需要准备哪些工具和文件?2026-07-23
更换主控具体需要准备哪些工具和文件?2026-07-23- 移动机器人技术分享-26年7月2026-07-17
 浙公网安备 33010802013223号
浙公网安备 33010802013223号