- 0
- 0
- 分享
- 2022-10-17 20:04
一、架设方案介绍
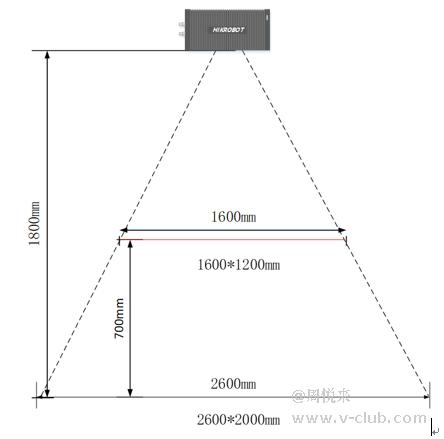
按照单相机标准方案架设,视野覆盖情况为:
模组尺寸(上视野):1.6m×1.2m
最高货物(景深):700mm:
注意:
1.遮光-设备环境搭建需要增加遮光帘等类似遮光设备。模组两侧需完全遮挡,前后侧需额外延伸50cm遮挡长度。
2.补光-设备架设需增加LED灯补光设备,使RGB-D智能立体相机获取图像时光照更均匀。
3.架设高度-架设高度超过1800mm时,景深不够会导致虚焦现象,矮包裹可能会定位不到。
4.模组尺寸-理论上最小包裹长宽需要大于等于单个模组长宽(包裹太小,模组太大会出现大间距问题无法避免)
按照标准方案架设好相机后,验证分离机模组是否通讯正常,确保3DMVS客户端为最新版本,相机固件和模型皆为最新版本,并做好PC相关环境配置。
二、相机成像参数设置:
①选择Scan Control,其中,Working Mode一栏选择Debug;
②选择Sensor Control,将Image Mode改为Color Image;
③Bining Selector选项:选择2×2为开启bining模式;
④帧率设置:帧率设为6帧即可;
⑤曝光时间:5000us;
⑥增益:10;
⑦gamma值:0.7;
此成像参数是在实验室进行测试时的通用参数,具体曝光参数根据现场情况进行调节,确保正常成像后,对包裹进行初步定位检测。
三、系统标定
①确定原点坐标,正确铺放标定布;
②测量标定布上系统偏移量;
③提前调整好曝光参数,确保标定布二维码在视野中清晰可见;
④切换为系统标定模式后,进行取图获取标定图片,绘制ROI需包含最高包裹;
⑤正确填写标定布棋盘格尺寸,偏移量X、Y;⑥标定完成后,标定阈值calib_err要小于3,否则需要重新标定。

四、相机算法参数设置
标定数据获取完成后,需要在算法参数中对位姿解算区域进行范围限制,操作如下:
①选择Algorithm Control,点击Package Separate Control子属性栏;
②点击Detect Range Selector。此节点代表要选择的限制解算区域的方向,一般只对X,Y方向进行设置,Z方向range默认设置-100到1000
③Min Detection Range代表限制范围最小值,一般设置为0
④Max Detection Range代表限制范围最大值,按照实际模组总长宽实际尺寸填写。

五、业务模式设置
最后工作模式选择 Singulation,,选择Mono Image图像模式,打开RGB Jpeg Enable使能,帧率设置为30帧,在Chunk Data Control选项下选择RGB Image,确保Chunk Mode Active和Chunk Enable使能开启;最后保存参数即可。
六、单件分离软件参数设置
安装单件分离软件,点击系统设置进行参数设置
①相机配置:点击+号添加相对应的相机,设置好出口入口顺序
②运行配置:模组类型选择定长模组,行数、列数、模组总长、模组总宽、出口速度、速度模式、最大速度按照实际现场情况填写,拉包间距按照现场要求填写,最小速度默认填写0.1m/s,电机延时默认50ms,默认电机速度推荐设置为最大速度的2/3,控包段数量默认填0即可。
③通信配置:通信方式选择协议拟定的即可,支持TCP客户端、TCP服务端、UDP、S7客户端,然后填写上对应的IP和端口号。




 话术-用AI协助编写VM3D脚本模块的代码2026-06-29
话术-用AI协助编写VM3D脚本模块的代码2026-06-29 基于基础应用扩展的偏心抓取算法2026-07-07
基于基础应用扩展的偏心抓取算法2026-07-07 更换主控具体需要准备哪些工具和文件?2026-07-23
更换主控具体需要准备哪些工具和文件?2026-07-23- 移动机器人技术分享-26年7月2026-07-17
 浙公网安备 33010802013223号
浙公网安备 33010802013223号