- 0
- 0
- 分享
- 2023-05-17 10:12
武汉电装项目-交通管制经验总结
一:硬件与软件
1,所用硬件:控制器4个(现场目前安装2个)
2,软件:BeeperConfigTool
二:控制器连接
(1)通过网线线或 wifi 将控制器与电脑连接起来,用网线时,注意控制器有线
固定 IP(192.168.1.64)与电脑 IP 同一网段;
(2)双击 BeeperConfigTool.exe 如下图所示,添加(用户名:admin 密码:
Hik@1234)
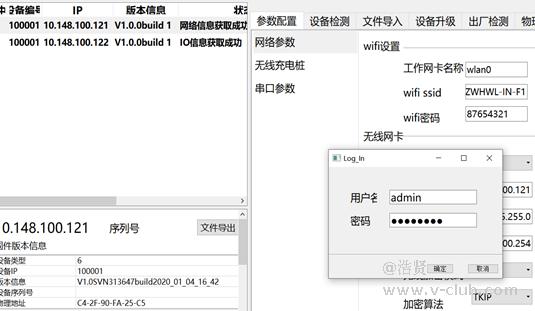
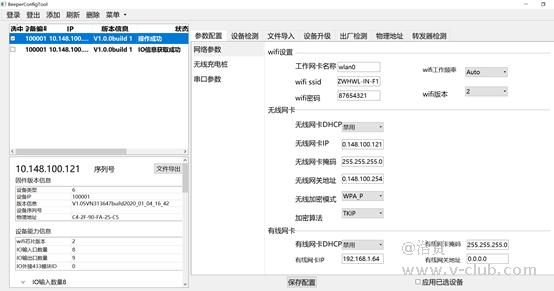
(3) 配置好无线IP,连接wifi。
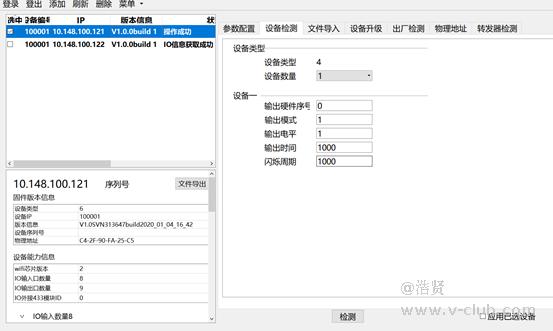
三:控制器测试
(1)测试几号引脚的灯在输入信号引脚处输入对应的多少号
输出信号引线:0
输出模式:1

四:对接协议

注意·多台小车需要一起通过管制区时,只能设置回头路,如未配置回头路,当第一台小车通过管制区还未离开管制区时,第二台小车会直接进入管制区,不会发申请信号。
五:系统配置
(1)

(2)多台小车需要一起通过管制区时,只能设置回头路
(3)设置自动门时,需要去外设里面添加自动门,一个管制区需配置一个自动门。另外可把两个地码之间的点加密一点来防止掉信号的问题。

(4)进入wcs配置文件,对接协议里由于X1为低电平时,通知agv进入管制区,报文更改为0:0_1(0:0为我们读取对方设备发出来的输出信号X1,由于X1信号协议里所需要的是低电平,所以报文为_1,如是高电平进入管制区时,需改为_0),文件里的10001为管制区设置的编号,openDoor为0是该管制区0引脚亮灯(协议里的Y1),lockDoor为1号引脚亮灯(协议里的Y2)

六:测试步骤
(1) 让日博关掉信号,我们自己控制agv通过管制区,等待agv到达管制区申请点时,观察控制器上Y1信号的变化,是否正常亮灯,等待小车进入管制区时,Y2信号的变化,是否变亮,等待agv离开管制区时,Y1,Y2的变化,是否熄灭。(与对方设备联动起来之前先测试看看自己信号有无问题,等待测试无异常后,再与对方设备联动起来)
(2) 让对方打开信号,并控制他们自己的小车进入管制区,停在管制区内,我们控制小车进入管制区,到达申请点时,看看小车是否停在管制区外,如果停止,再看控制器上配置的y1信号灯的情况,是否发出申请信号,接下来让对方小车驶离管制区,观察小车与控制器上配置的x1与y2变化,x1熄灭,小车启动进入管制区,y2亮灯,再继续观察小车离开管制区时,y1与y2是否熄灭,表示小车已离开管制区。
(3) 控制我们小车进入管制区,停在管制区内时,目前控制器应该是y1与y2亮灯,x1为熄灭,再让对方小车进入我们小车所在的管制区,看看是否能被锁在外面,不能进入管制区,后让我们小车驶离管制区,并观察y1,y2信号是否熄灭,并观察对方设备是否正常进入管制区。
七:控制器配置
需要用新版配置工具连接控制器,把设备类型改为串口数据转发器,否则控制器自动一些能力集(默认的功能),会影响到信号交互。



 一文带你入门RCS4.X-(4.2.8单独档)【任务编排】(四)2025-06-23
一文带你入门RCS4.X-(4.2.8单独档)【任务编排】(四)2025-06-23 秒懂VisionMaster!「VM助手」上线,有问必答的AI导师来了!2025-06-26
秒懂VisionMaster!「VM助手」上线,有问必答的AI导师来了!2025-06-26 AMR助手,你的技术外挂,上线啦!2025-07-03
AMR助手,你的技术外挂,上线啦!2025-07-03 魔都车展,海康机器人携最新“眼”技报道!2025-07-04
魔都车展,海康机器人携最新“眼”技报道!2025-07-04 VM3D应用-插针检测方案进阶讲解2025-06-21
VM3D应用-插针检测方案进阶讲解2025-06-21
 浙公网安备 33010802013223号
浙公网安备 33010802013223号