

各类标定,都在这里
9篇
- 常见的标定方法简介
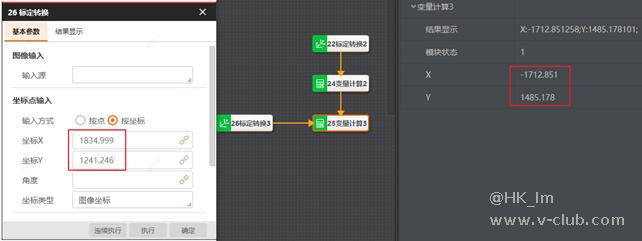
- VM应用之平移旋转标定使用
- 3D轮廓仪如何进行系统标定
- 双目相机标定原理
- 工程经验系列:视觉定位(标定设计,及应用)
- 浅谈VisionMaster中的畸变矫正工具(以及VM标定板二的灵活应用)
- 相机旋转,代替机械爪旋转,标定旋转中心。
- 【共享学习】单相机位与多相机定位分析
- 平移旋转标定模块与绝对坐标
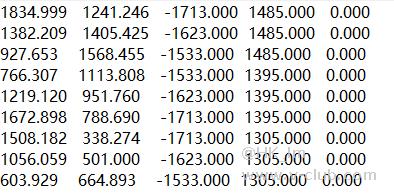
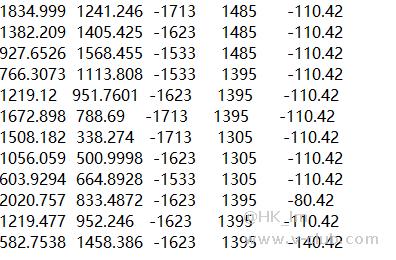
共轴场景中,VM推荐9点标定,9组图像点和物理点如下所示,此时用平移旋转标定模块标定得到的标定矩阵为绝对标定矩阵。
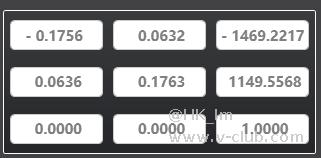
9点绝对标定矩阵如下图所示。
此时将第五点图像坐标转换得到物理坐标为第五点绝对物理坐标,如下图所示。

共轴场景中,VM推荐9点平移+3点旋转,12组图像点和物理点如下所示,此时用平移旋转标定模块标定得到的标定矩阵为相对标定矩阵。
12点相对标定矩阵如下图所示。

此处标定前9组与上述9组像素坐标和物理坐标一样,即缩放系数及旋转量都是相同的。可以观察到标定矩阵第三列不同,12点的标定时矩阵进行了归一化,将旋转中心做为原点,即M12*Image旋转中心=[0,0]T。可以根据已知条件,将12点相对标定矩阵还原成9点绝对标定矩阵,即可得到像素坐标对应的绝对坐标值。
1)还原标定矩阵,12点相对标定矩阵到9点绝对标定矩阵,即计算第三列。通过第五组像素坐标和物理坐标来计算第三列,计算方法如下:

此时可求出第三列为M12New第三列 = [-1469.073, 1149.735, 1]T
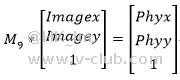
2)因此12点相对标定下,任意像素坐标对应的绝对物理坐标计算方法如下:



我验证了一下,【第5点物理坐标 - 12点标定矩阵*第5点像素坐标 + 12点矩阵第3列 】得到的新的第3列的值,与直接进行九点标定得到的第3列的值相差的比较多。这个理论上上应该是一样的吧?
楼主,您好,我用您的数据算12点相对标定矩阵还原成9点绝对标定矩阵的结果很奇怪。y是一样的,x和您差很多。想和您对一下数据,12点标定矩阵*第5点像素坐标结果是:转换坐标X446.5589转换坐标Y:-292.1398。然后【第5点物理坐标 + 12点矩阵第3列 old- 12 点标定矩阵*第5点像素坐标 】 = (-1623,1395)+ (172.3302,-537.4711)-(446.5589,-292.1398) = (-1897.229,1149.669)而您的计算的是(-1469.073, 1149.735). 留个邮箱交流可以吗:yaked19@163.com




 浙公网安备 33010802013223号
浙公网安备 33010802013223号