一. 开发环境
(1)visual studio 2022
(2)OpenCV 4.8.0
(3)libtorch 1.13.1
(4)PCL 1.13.0
二. 模板点云数据扣取
使用 CloudCompare 工具扣取模板点云,本课题以“锤子”为例,扣取“锤子”的点云数据保存为“target.txt”。扣取前如图2.1所示,扣取后点云数据如图2.2所示。
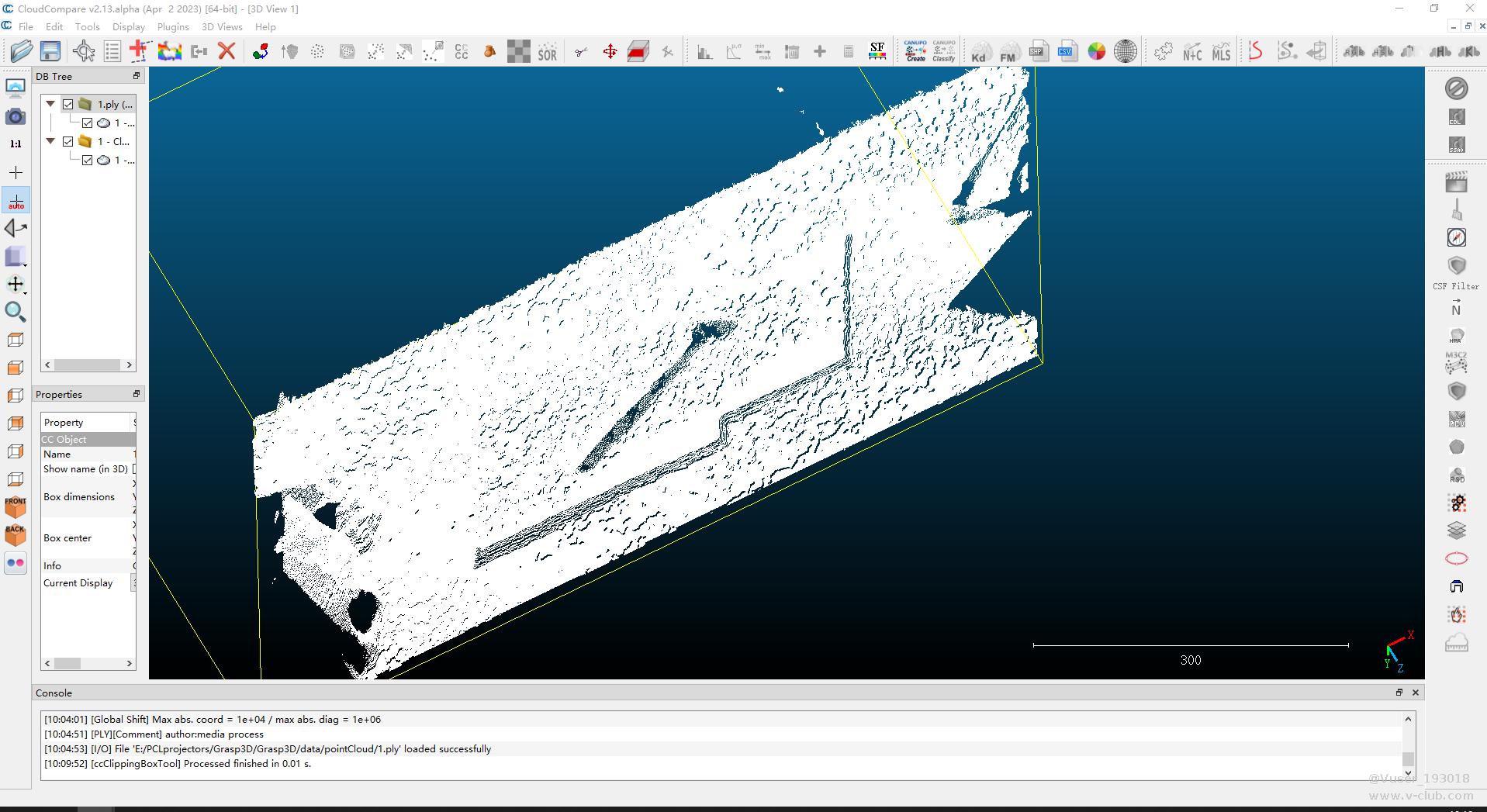
图2.1 原始点云数据
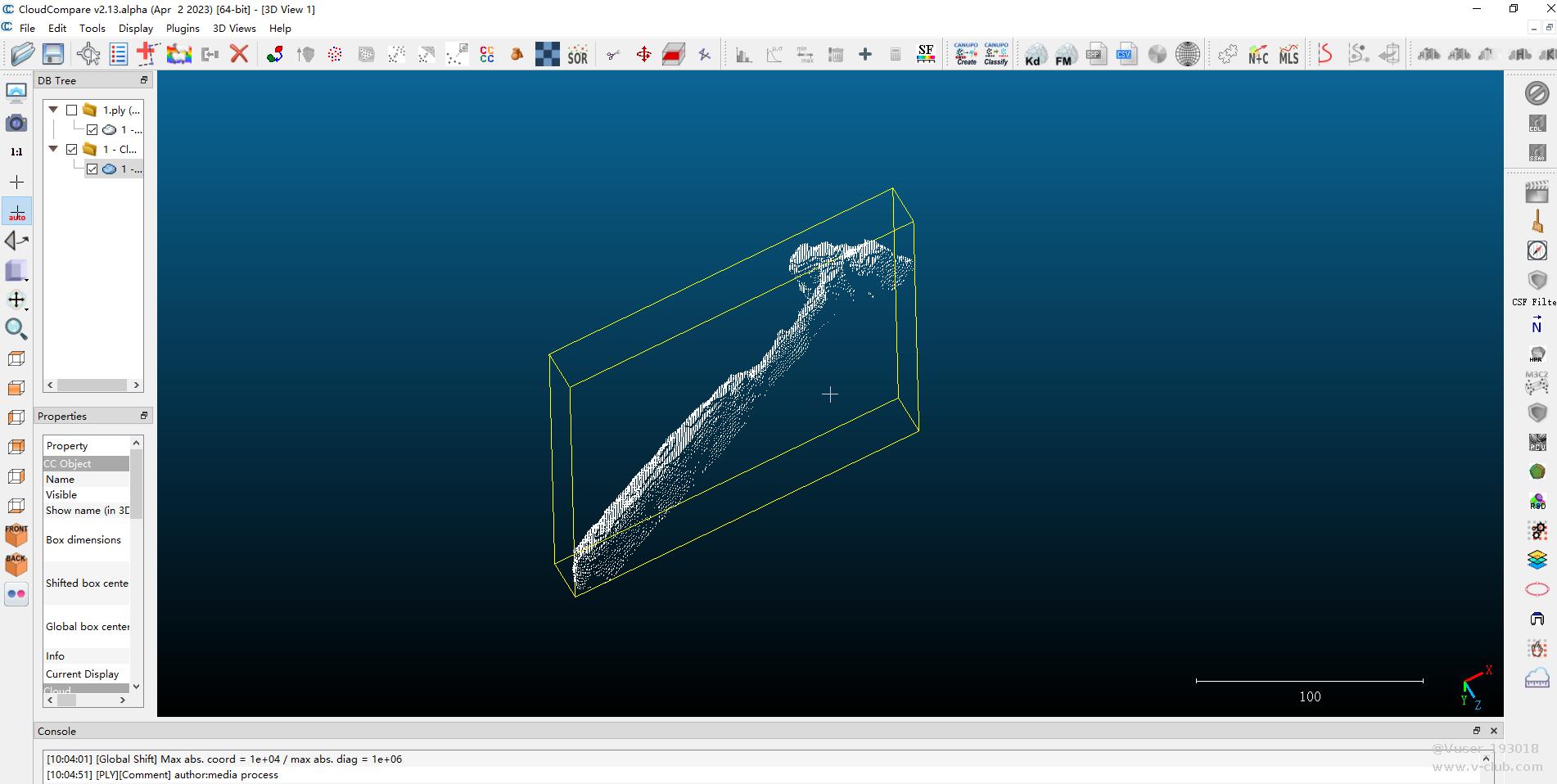
图2.2 扣取的模板点云数据
三. 输入点云数据预处理
1. 基于YOLO获取目标所在矩形框
使用目标检测算法YOLO获取目标(“锤子”)的矩形框,目标检测结果如图 3.1 所示。

图3.1 锤子目标检测结果
2. 扣取输入目标点云数据
基于YOLO的检测结果矩形框,扣取“锤子”的点云数据,该步骤代码如下:
// -------------------- source -----------------------------------------------------
std::string source_img_path = "./data/RGB/118.bmp";
std::string source_ply_path = "./data/pointCloud/118.ply";
cv::Mat img_source = cv::imread(source_img_path, -1);
std::vector<std::vector<Detection>> result_template = m_yolo.predect(img_source);
cv::Rect m_box;
bool isExist = false;
for (int i = 0; i < result_template.size(); i++)
{
std::vector<Detection> res = result_template[i];
for (int j = 0; j < res.size(); j++)
{
Detection det = res[j];
int res_class = det.class_idx;
if (0 == res_class)
{
m_box = det.bbox;
isExist = true;
cv::rectangle(img_source, m_box, cv::Scalar(255, 0, 0));
}
}
}
if (false == isExist)
{
std::cerr << "the hammer is not exixt" << std::endl;
return 0;
}
std::cout << "source box: " << m_box << std::endl;
int x_min = m_box.x;
int y_min = m_box.y;
int x_max = m_box.width + x_min;
int y_max = m_box.height + y_min;
// PCL
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_source(new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPLYFile(source_ply_path, *cloud_source);
// cut
pcl::PointCloud<pcl::PointXYZ>::Ptr source_cut(new pcl::PointCloud<pcl::PointXYZ>);
for (int i = y_min; i < y_max; i++)
{
for (int j = x_min; j < x_max; j++)
{
if (x_min < j && j < x_max && y_min < i && i < y_max)
{
int current_i = i * img_source.cols + j;
if (600 < cloud_source->points[current_i].z && cloud_source->points[current_i].z < 700)
source_cut->push_back(cloud_source->points[current_i]);
}
}
}
扣取的点云数据如图3.2所示,其中红色点云为输入源扣取的数据,蓝色点云为模板点云数据。
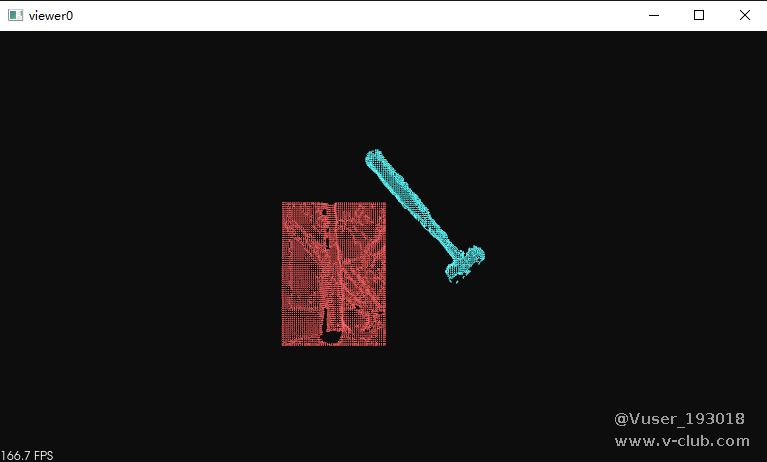
图3.2 输入源和模板点云图
四. 点云配准
基于点云配准算法GICP, 对输入源与模板进行配准计算,相关代码如下:
// -------------------配准----------------------------------------------------
// === gicp
pcl::GeneralizedIterativeClosestPoint<pcl::PointXYZ, pcl::PointXYZ> gicp;
gicp.setInputSource(source_cut); // 源点云
gicp.setInputTarget(p_target); // 目标点云
gicp.setTransformationEpsilon(1e-5); // 为终止条件设置最小转换差异
gicp.setMaxCorrespondenceDistance(100); // 设置对应点对之间的最大距离(此值对配准结果影响较大)。
gicp.setEuclideanFitnessEpsilon(0.0001); // 设置收敛条件是均方误差和小于阈值,停止迭代;
gicp.setMaximumIterations(1000); // 最大迭代次数
gicp.setUseReciprocalCorrespondences(true);//设置为true,则使用相互对应关系
pcl::PointCloud<pcl::PointXYZ> aligned_cloud;
gicp.align(aligned_cloud);
Eigen::Matrix4f final_transformation = gicp.getFinalTransformation();
五. 显示结果
通过上述步骤得到两组点云的六自由度位姿关系,基于该结果可以用于机械臂抓取,完整代码如下:
// Grasp3D.cpp : 此文件包含 "main" 函数。程序执行将在此处开始并结束。
//
#include <iostream>
#include "YOLOV5Handle.h"
#include <limits>
#include <fstream>
#include <vector>
#include <Eigen/Core>
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
//#include <pcl/io/pcd_io.h>
#include <pcl/io/ply_io.h>
#include <pcl/kdtree/kdtree_flann.h>
#include <pcl/filters/passthrough.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/features/normal_3d.h>
#include <pcl/features/fpfh.h>
#include <pcl/registration/ia_ransac.h>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/search/impl/search.hpp>
#include <pcl/registration/gicp.h>
#include <boost/thread/thread.hpp>
#include <pcl/registration/icp.h>
typedef pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> PCLHandler;
//-------------------------------从txt文件中读取三维坐标-------------------------------------
void CreateCloudFromTxt(const std::string file_path, pcl::PointCloud<pcl::PointXYZ>::Ptr& cloud)
{
std::ifstream file(file_path.c_str());
std::string line;
pcl::PointXYZ point;
while (getline(file, line)) {
std::stringstream ss(line);
ss >> point.x;
ss >> point.y;
ss >> point.z;
cloud->push_back(point);
}
file.close();
}
// YOLO
YOLOv5Handle m_yolo("./models/YOLOv5.torchscript");
void mPreprocess(pcl::PointCloud<pcl::PointXYZ>::Ptr& cloud_target)
{
// -------------------预处理------------------------------------------------------
// Preprocess the cloud by...
// ... and downsampling the point cloud 降采样点云, 减少计算量
// 定义体素大小 3mm
std::cout << "downsampling" << std::endl;
const float voxel_grid_size = 3.0f;
pcl::VoxelGrid<pcl::PointXYZ> vox_grid;
vox_grid.setInputCloud(cloud_target);
// 设置叶子节点的大小lx, ly, lz
vox_grid.setLeafSize(voxel_grid_size, voxel_grid_size, voxel_grid_size);
//vox_grid.filter (*cloud); // Please see this http://www.pcl-developers.org/Possible-problem-in-new-VoxelGrid-implementation-from-PCL-1-5-0-td5490361.html
pcl::PointCloud<pcl::PointXYZ>::Ptr tempCloud1(new pcl::PointCloud<pcl::PointXYZ>);
vox_grid.filter(*tempCloud1);
cloud_target = tempCloud1;
}
int main()
{
// ---------------------------- target ------------------------------------------------
pcl::PointCloud<pcl::PointXYZ>::Ptr p_target(new pcl::PointCloud<pcl::PointXYZ>);
CreateCloudFromTxt("./models/model.txt", p_target);
mPreprocess(p_target);
// -------------------- source -----------------------------------------------------
std::string source_img_path = "./data/RGB/118.bmp";
std::string source_ply_path = "./data/pointCloud/118.ply";
cv::Mat img_source = cv::imread(source_img_path, -1);
std::vector<std::vector<Detection>> result_template = m_yolo.predect(img_source);
cv::Rect m_box;
bool isExist = false;
for (int i = 0; i < result_template.size(); i++)
{
std::vector<Detection> res = result_template[i];
for (int j = 0; j < res.size(); j++)
{
Detection det = res[j];
int res_class = det.class_idx;
if (0 == res_class)
{
m_box = det.bbox;
isExist = true;
cv::rectangle(img_source, m_box, cv::Scalar(255, 0, 0));
}
}
}
if (false == isExist)
{
std::cerr << "the hammer is not exixt" << std::endl;
return 0;
}
std::cout << "source box: " << m_box << std::endl;
int x_min = m_box.x;
int y_min = m_box.y;
int x_max = m_box.width + x_min;
int y_max = m_box.height + y_min;
// PCL
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_source(new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPLYFile(source_ply_path, *cloud_source);
// cut
pcl::PointCloud<pcl::PointXYZ>::Ptr source_cut(new pcl::PointCloud<pcl::PointXYZ>);
for (int i = y_min; i < y_max; i++)
{
for (int j = x_min; j < x_max; j++)
{
if (x_min < j && j < x_max && y_min < i && i < y_max)
{
int current_i = i * img_source.cols + j;
if (600 < cloud_source->points[current_i].z && cloud_source->points[current_i].z < 700)
source_cut->push_back(cloud_source->points[current_i]);
}
}
}
mPreprocess(source_cut);
// -------------------配准----------------------------------------------------
// === gicp
pcl::GeneralizedIterativeClosestPoint<pcl::PointXYZ, pcl::PointXYZ> gicp;
gicp.setInputSource(source_cut); // 源点云
gicp.setInputTarget(p_target); // 目标点云
gicp.setTransformationEpsilon(1e-5); // 为终止条件设置最小转换差异
gicp.setMaxCorrespondenceDistance(100); // 设置对应点对之间的最大距离(此值对配准结果影响较大)。
gicp.setEuclideanFitnessEpsilon(0.0001); // 设置收敛条件是均方误差和小于阈值,停止迭代;
gicp.setMaximumIterations(1000); // 最大迭代次数
gicp.setUseReciprocalCorrespondences(true);//设置为true,则使用相互对应关系
pcl::PointCloud<pcl::PointXYZ> aligned_cloud;
gicp.align(aligned_cloud);
Eigen::Matrix4f final_transformation = gicp.getFinalTransformation();
// === result
std::cout << "Transformation matrix:" << std::endl << final_transformation << std::endl;
// Print the rotation matrix and translation vector
Eigen::Matrix3f rotation = final_transformation.block<3, 3>(0, 0);
Eigen::Vector3f translation = final_transformation.block<3, 1>(0, 3);
Eigen::Vector3f euler_angles = rotation.eulerAngles(2, 1, 0) * 180 / M_PI;
printf("\n");
printf(" | %6.3f %6.3f %6.3f | \n", rotation(0, 0), rotation(0, 1), rotation(0, 2));
printf("R = | %6.3f %6.3f %6.3f | \n", rotation(1, 0), rotation(1, 1), rotation(1, 2));
printf(" | %6.3f %6.3f %6.3f | \n", rotation(2, 0), rotation(2, 1), rotation(2, 2));
printf("\n");
cout << "yaw(z) pitch(y) roll(x) = " << euler_angles.transpose() << endl;
printf("\n");
printf("t = < %0.3f, %0.3f, %0.3f >\n", translation(0), translation(1), translation(2));
// Save the aligned template for visualization
//pcl::PointCloud<pcl::PointXYZ> transformed_cloud;
// 将模板中保存的点云图进行旋转矩阵变换,把变换结果保存到transformed_cloud
//pcl::transformPointCloud(*source_cut, transformed_cloud, final_transformation);
// ---------------------------- view_0 -------------------------------------------------------
pcl::visualization::PCLVisualizer viewer0("viewer0");
// 设置坐标系系统
viewer0.addCoordinateSystem(0.5, "cloud", 0);
// 设置背景色
viewer0.setBackgroundColor(0.05, 0.05, 0.05, 0); // Setting background to a dark grey
// 1. target
PCLHandler template_cloud_handler(p_target, 100, 255, 255);
viewer0.addPointCloud(p_target, template_cloud_handler, "target_cloud");
// 设置渲染属性(点大小)
viewer0.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "target_cloud");
// 2. 裁剪后
PCLHandler source_cut_handler(source_cut, 255, 100, 100);
viewer0.addPointCloud(source_cut, source_cut_handler, "source_cut");
// 设置渲染属性(点大小)
viewer0.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "source_cut");
// ---------------------------- view -------------------------------------------------------
pcl::visualization::PCLVisualizer viewer("viewer");
// 设置坐标系系统
viewer.addCoordinateSystem(0.5, "cloud", 0);
// 设置背景色
viewer.setBackgroundColor(0.05, 0.05, 0.05, 0); // Setting background to a dark grey
// 4. target
//PCLHandler template_cloud_handler(p_target, 100, 255, 255);
viewer.addPointCloud(p_target, template_cloud_handler, "target_cloud");
// 设置渲染属性(点大小)
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "target_cloud");
// 5. 旋转后的点云rotated
pcl::PointCloud<pcl::PointXYZ>::Ptr t_cloud(&aligned_cloud);
PCLHandler target_cloud_handler(t_cloud, 255, 100, 100);
viewer.addPointCloud(t_cloud, target_cloud_handler, "rotated_cloud");
// 设置渲染属性(点大小)
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "rotated_cloud");
// ====
cv::namedWindow("img",0);
cv::imshow("img", img_source);
while (!viewer0.wasStopped() && !viewer.wasStopped()) { // Display the visualiser until 'q' key is pressed
viewer0.spinOnce();
viewer.spinOnce();
}
cv::destroyAllWindows();
return (0);
}
计算结果如图5.1所示
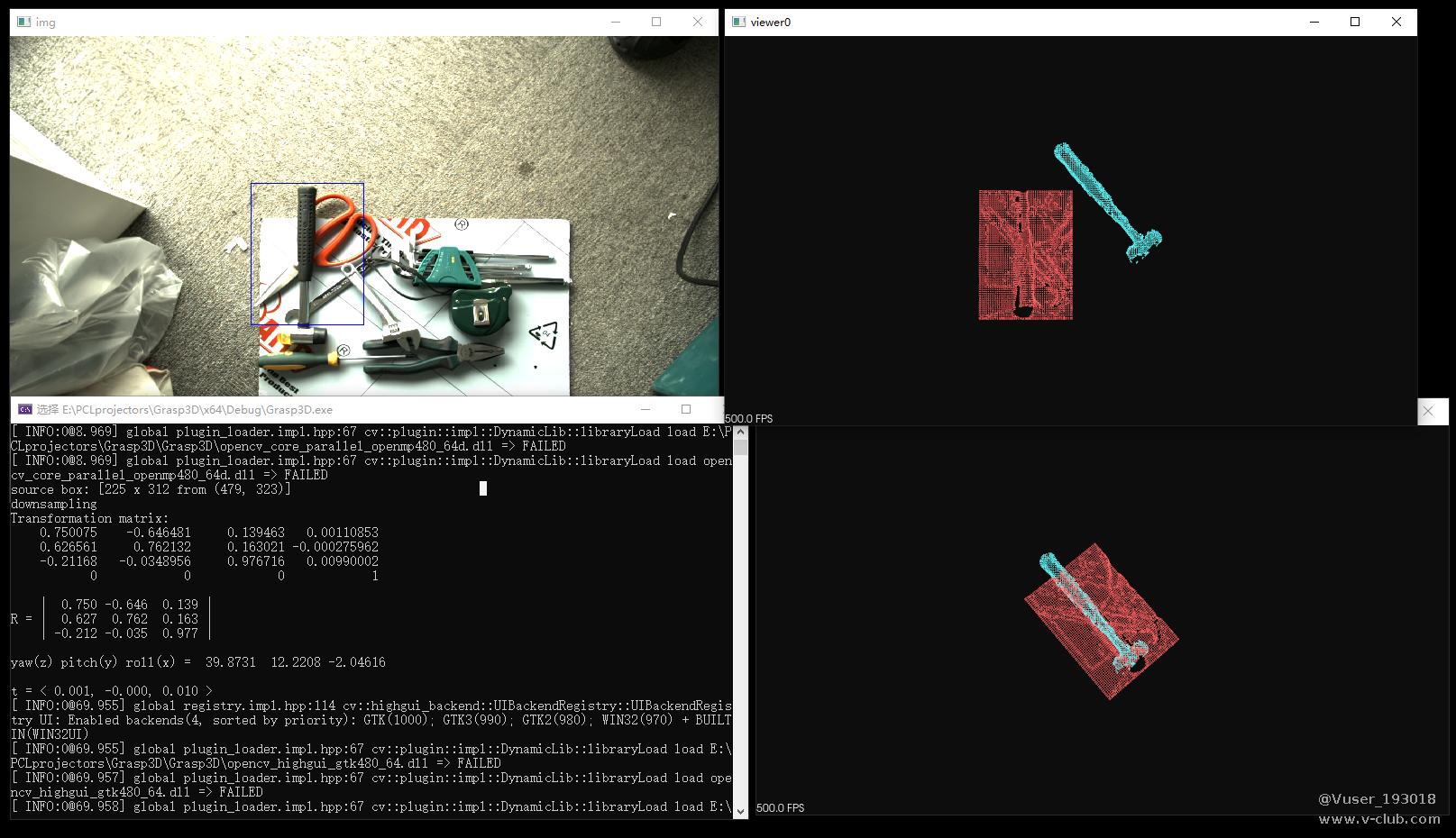
图5.1 六自由度位姿关系计算结果









 浙公网安备 33010802013223号
浙公网安备 33010802013223号