- 0
- 2
- 分享
- 2023-10-09 09:46
1.1 下读码头标定
1.1.1 生成标定文件
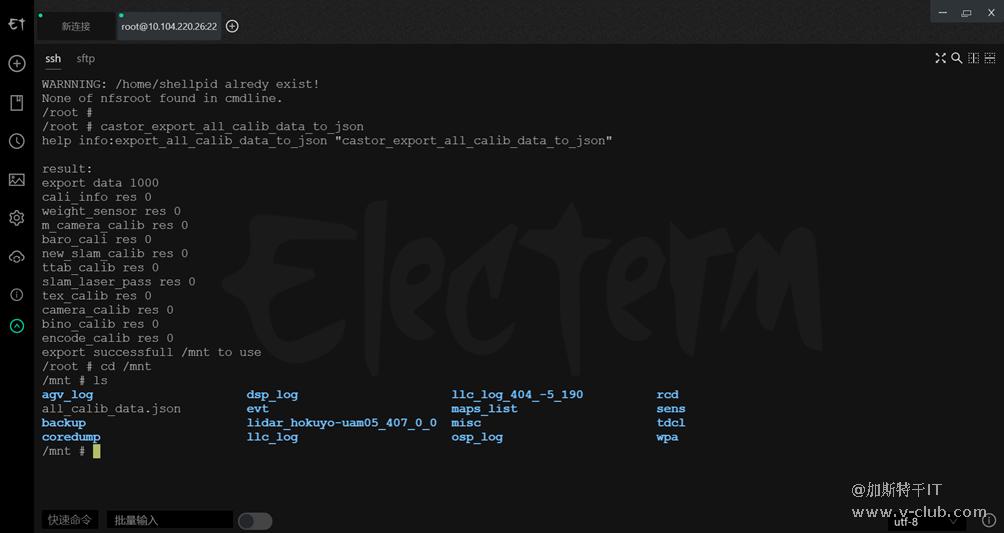
使用终端工具连接机器人
步骤1 输入指令“castor_export_all_calib_data_to_json”导出读码头标定文件。
步骤2 切换到 /mnt目录下。
步骤3 下载all_calib_data.json文件。
1.1.2 下载标定文件
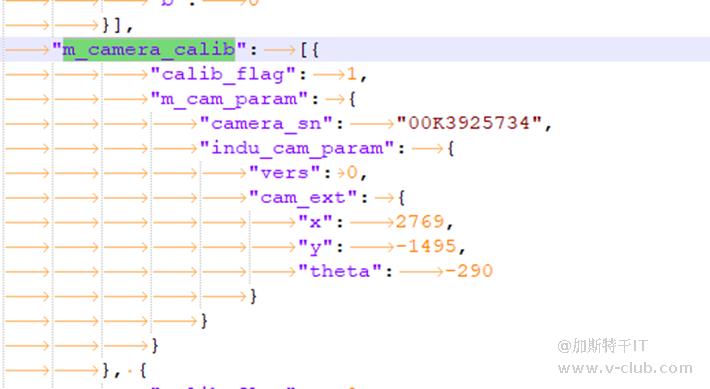
输入指令“sz all_calib_data.json”下载标定文件单独保存,复制一份标定文件作为修改原始文件,文件中搜索“m_camera_calib”,按照顺序第一组为下读码头外参标定参数,手动补偿微调第一组数据的x、y、theta参数。
注意:x、y单位是1/1000mm,theta单位为1/1000度;修改时确认具体数值和单位,all_calib_data.json文件做好备份;
1.1.3 标定操作
步骤1 选取一段地面较为平整的主通道,需要保证机器人执行任务这一段路无走偏情况发生。
步骤2 监控客户端下发任务,机器人车头向前行驶,从车尾向车头观察,若车头向左偏则在现有的theta值得基础上补偿一个正值,反之则补偿一个负值。
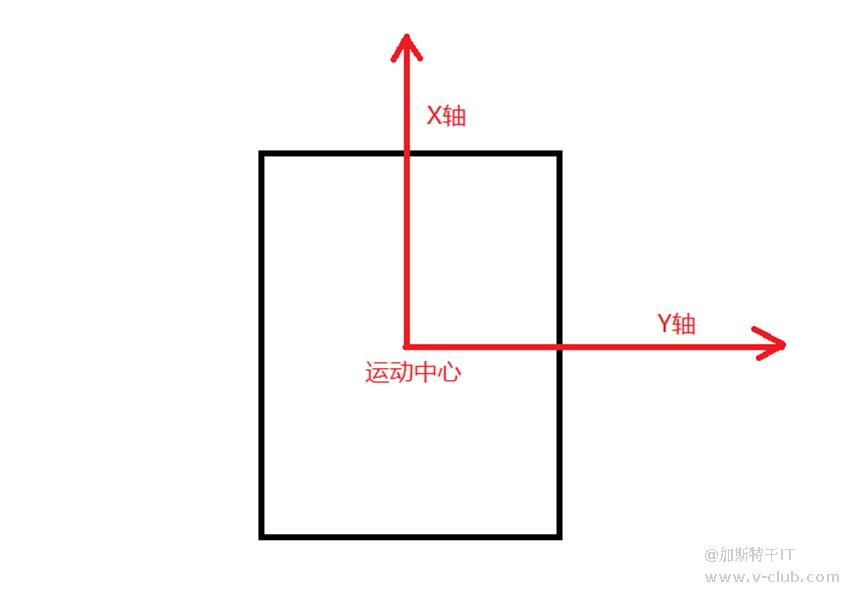
车体运动中心坐标系
步骤3 每次补偿0.5度然后观察结果,即在现场有基础上+500或-500。
步骤4 若需要让机器人整体“向前”移一些,x值补偿负值,反之则补偿正值。
步骤5 若需要让机器人整体“左侧”移一些,x值补偿负值,反之则补偿正值。
步骤6 上传all_calib_data.json。
输入指令“ps“查看carServer进程号。
输入指令“kill -9 进程号“。
输入指令“ps“查看carServer进程是否杀掉,若未杀掉则重复操作杀进程。
确认carServer进程杀掉之后,输入指令“rm all_calib_data.json“删除原来文件。
输入指令“rz“上传修改之后的文件。
1.2 上读码头标定
1.2.1 生成标定文件
参考1.1.1 生成标定文件
1.2.2 下载标定文件
参考1.1.2 下载标定文件
1.2.3 标定操作
标定文件all_calib_data.json中搜索“m_camera_calib”,按照顺序第二组和第三组为上镜头举升前和举升后得参数。

步骤2 货架偏向逆时针方向,需顺时针转一下才正,现有theta补偿一个正值。
步骤3 货架偏向顺时针方向,需逆时针转一下才正,现有theta补偿一个负值。
步骤4 每次补偿0.5度然后观察结果,即在现场有基础上+500或-500。
步骤5 上传all_calib_data.json。
输入指令“ps“查看carServer进程号。
输入指令“kill -9 进程号“。
输入指令“ps“查看carServer进程是否杀掉,若未杀掉则重复操作杀进程。
确认carServer进程杀掉之后,输入指令“rm all_calib_data.json“删除原来文件。
输入指令“rz“上传修改之后的文件。

- 1

 话术-用AI协助编写VM3D脚本模块的代码2026-06-29
话术-用AI协助编写VM3D脚本模块的代码2026-06-29 基于基础应用扩展的偏心抓取算法2026-07-07
基于基础应用扩展的偏心抓取算法2026-07-07 更换主控具体需要准备哪些工具和文件?2026-07-23
更换主控具体需要准备哪些工具和文件?2026-07-23- 移动机器人技术分享-26年7月2026-07-17
 浙公网安备 33010802013223号
浙公网安备 33010802013223号