浅谈对海康视觉软件做定位/对位项目的想法五-----VM功能优化建议&解决方案
- 0
- 2
- 分享
- 2024-02-19 09:43
前面四期说了定位项目必须得标定/通讯等,表扬了VM的好处,这期来补充说明下VM与其他视觉软件使用对比等,各位小伙伴可以提出VM应用的任何疑问或者一些无法实现的问题,我来解答。抛砖引玉,我先提2个,以及对应解决方案供参考。
第一条:VM中全局变量没有数组类型能够创建,十分不方便。
解决方案:
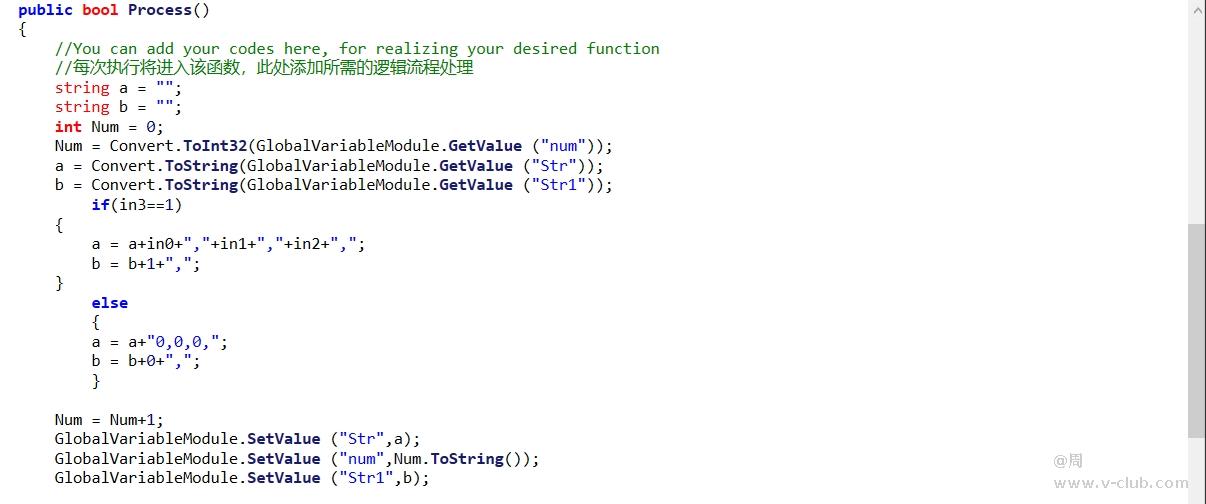
1.全局脚本建立int型Num,用于计数,string型Str用于储存变量值,string型Str1用于储存结果值。
2.编写脚本,获取全局变量Num,Str,Str1,Num变量自动加1,赋值完成后,将局部变量赋值到全局变量上去,以此循环,获取指定个数后,进行数据Num清0,Str清零。脚本编写如下:
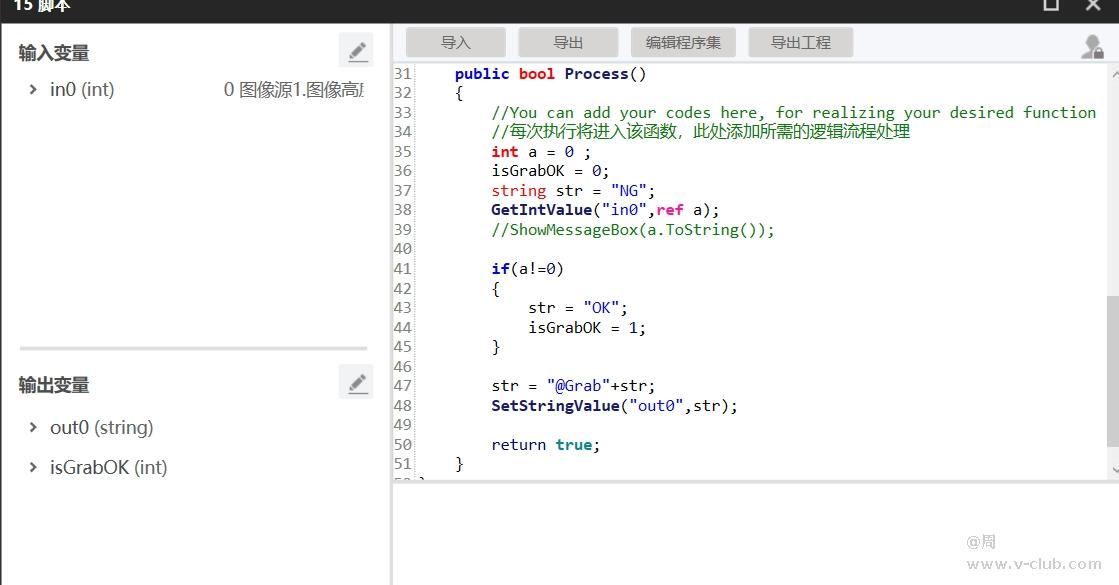
第二条:图像源模块没有模块状态输出,取图NG/相机掉线等原因失败,无法订阅其状态。
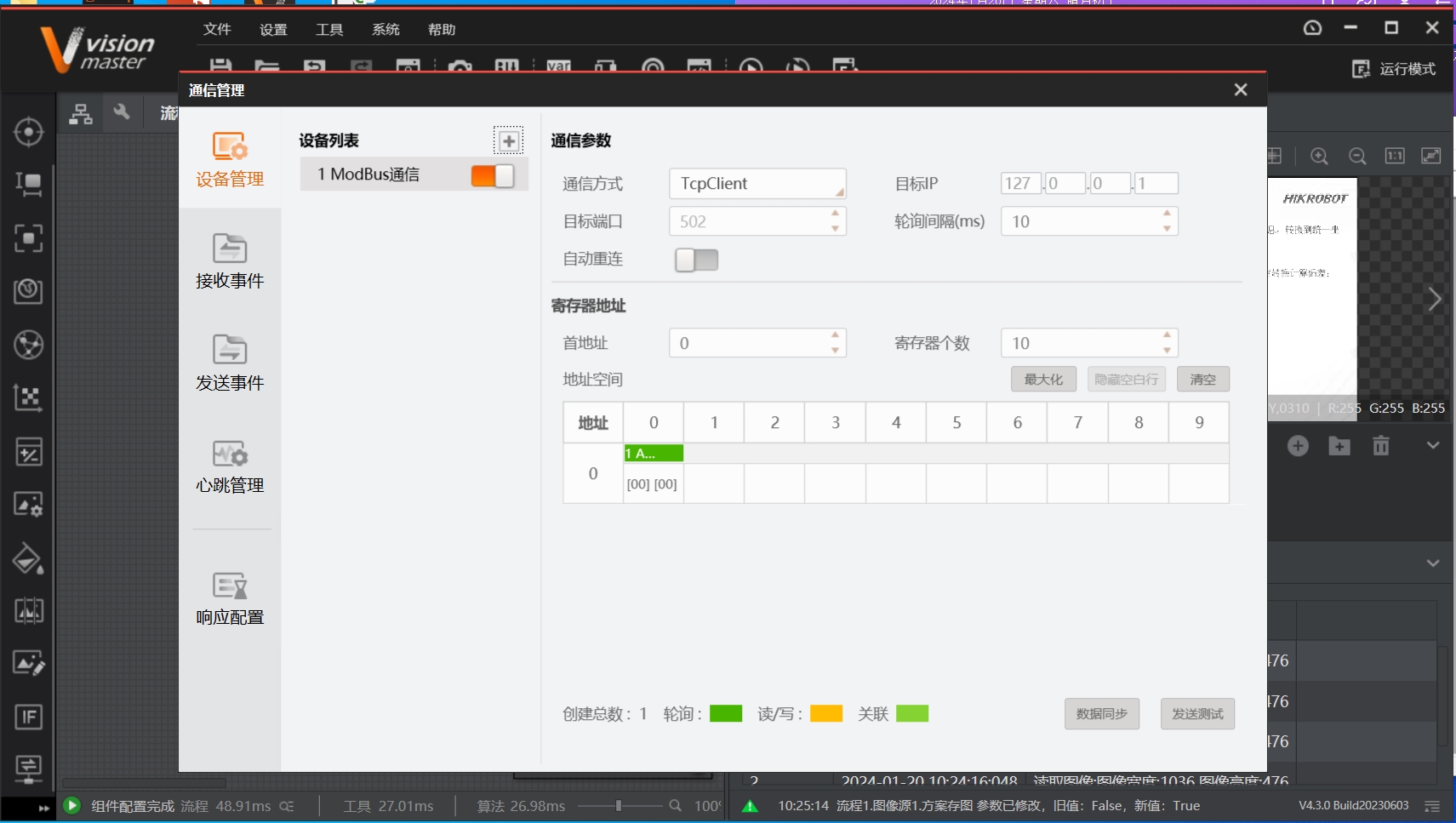
解决方案:通过订阅输出图像的宽高,帧号等参数,来替代模块状态,即可实现检测VM取图是否OK。
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。

评论请先登录 登录
全部评论 2

- 1

相关阅读
 话术-用AI协助编写VM3D脚本模块的代码2026-06-29
话术-用AI协助编写VM3D脚本模块的代码2026-06-29 基于基础应用扩展的偏心抓取算法2026-07-07
基于基础应用扩展的偏心抓取算法2026-07-07 更换主控具体需要准备哪些工具和文件?2026-07-23
更换主控具体需要准备哪些工具和文件?2026-07-23- 移动机器人技术分享-26年7月2026-07-17
 浙公网安备 33010802013223号
浙公网安备 33010802013223号