浅谈VM的使用技巧篇一
- 0
- 3
- 分享
- 2025-01-02 15:20
之前出了一个关于VM定位使用的专项篇,本期出一下VM使用技巧篇,供大家学习参考,有不足的地方可以指出,大家互相学习交流。
问题一:VM的通讯心跳管理:对于TCP通讯来说:无法发送回车换行。对于PLC来说,无法发送float/string类型。
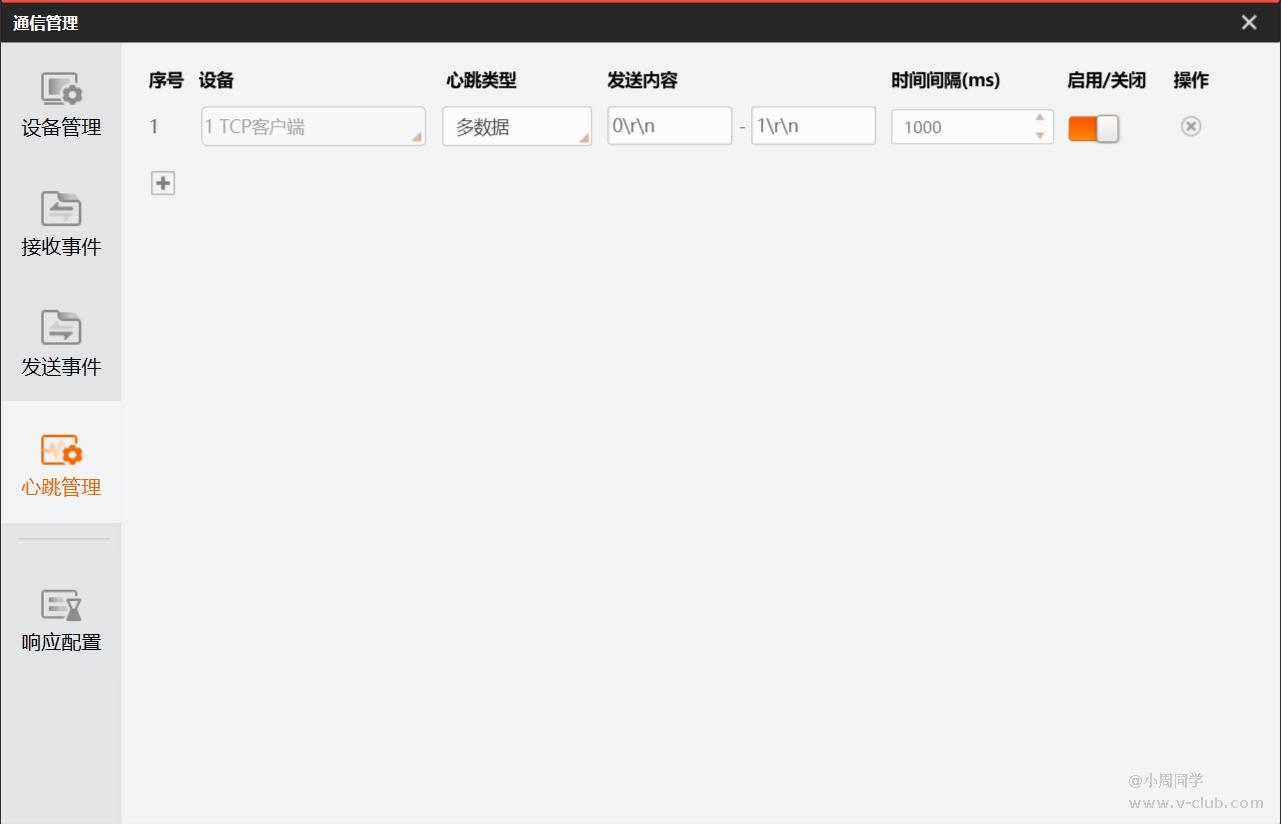
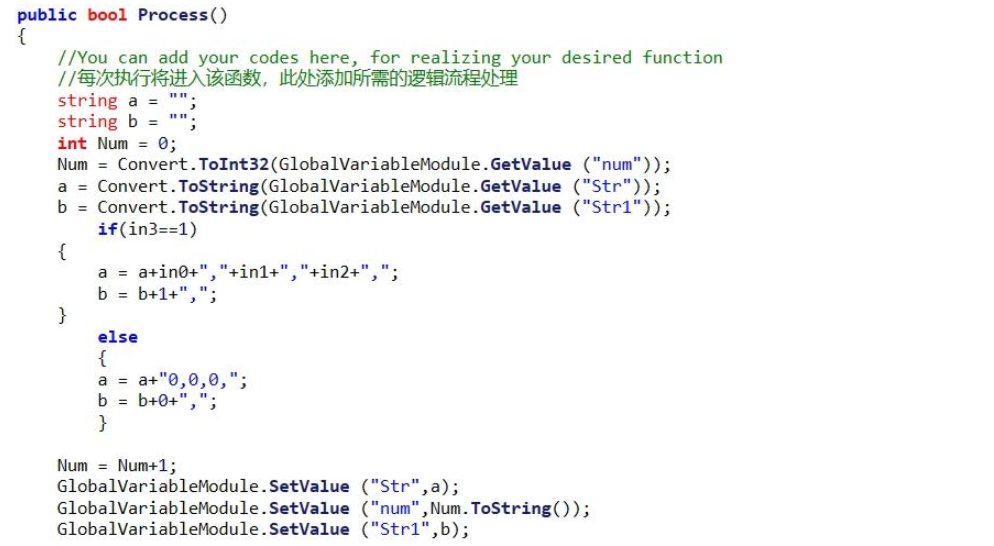
思路解决: 1.在全局脚本中设置一个定时器,
2.在方案初始化完成函数中,执行定时器内容,实现数据交互。
3.在资源释放函数中,释放定时器的资源。

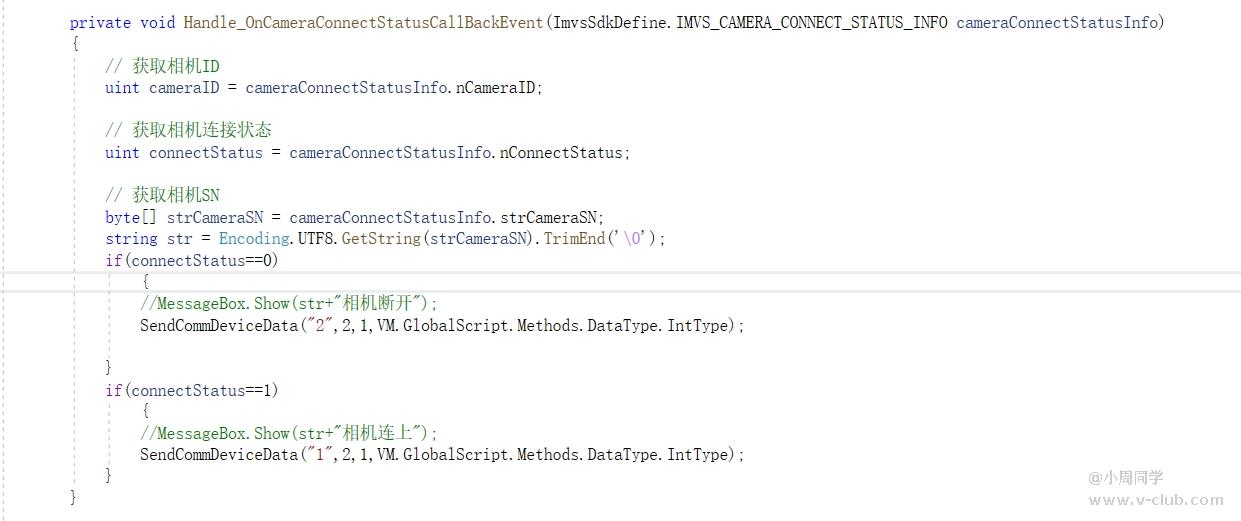
问题二:相机和通讯的掉线监控:全局相机管理中,相机是有自动重连功能,但如果相机在掉线时间内重连了,我们则无法获取得到对应时间。
思路解决:1.引入二开的相机掉线/重连事件,通过事件回调,将相机掉线时间打印到log日志中/或者发送数据到PLC的寄存器中。
以上是一些通过脚本进行处理的,源码在附件中,VM版本为VM430-1128的版本,有需要可以下载学习,小伙伴们如果有其他想要实现的功能可以敲在评论区上,下一期随机挑选能处理的3个问题来进行方法解答。
附件:
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
评论请先登录 登录
全部评论 3


- 1

相关阅读
 话术-用AI协助编写VM3D脚本模块的代码2026-06-29
话术-用AI协助编写VM3D脚本模块的代码2026-06-29 基于基础应用扩展的偏心抓取算法2026-07-07
基于基础应用扩展的偏心抓取算法2026-07-07 更换主控具体需要准备哪些工具和文件?2026-07-23
更换主控具体需要准备哪些工具和文件?2026-07-23- 移动机器人技术分享-26年7月2026-07-17
 浙公网安备 33010802013223号
浙公网安备 33010802013223号