- 0
- 6
- 分享
- 2024-08-05 11:12
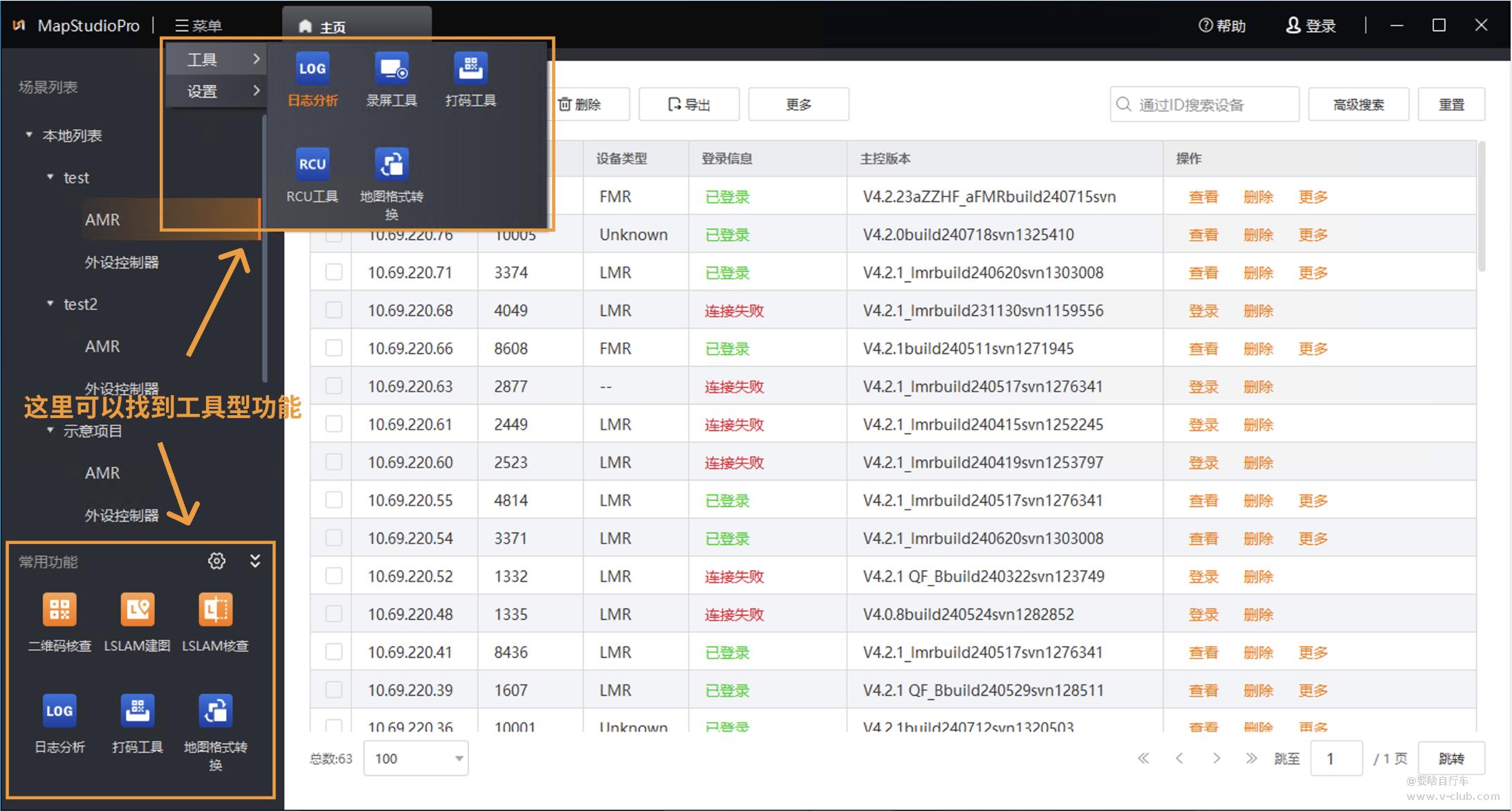
前段时间AMR的实施工具进行了一次大改版,把原本的MapStudio、RoboX等多个客户端进行了整合。相信第一眼看到新版主界面的朋友可能都会有点懵:这和“MapStudio"有啥区别?原来的地图卡片哪去了?左侧列表又是什么作用?我想用的功能都要上哪找……针对以上问题,本文将从几个方面做简单的介绍,希望对初次使用又不知无从下手的小伙伴有一定帮助😁
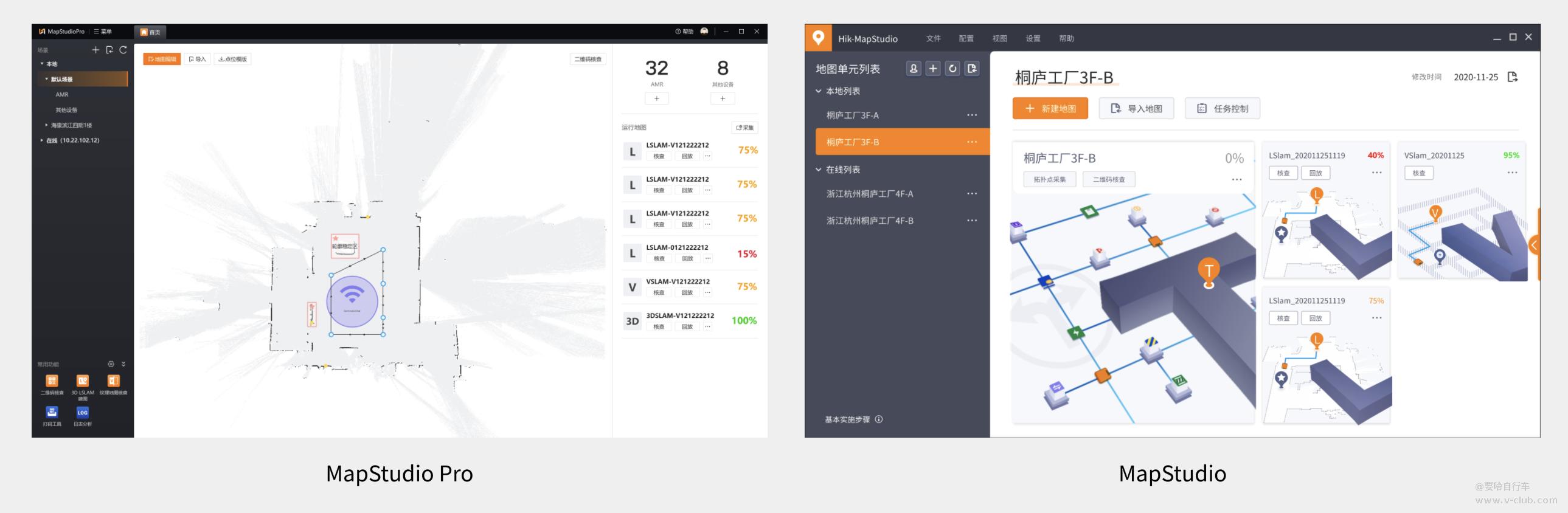
一、数据管理升级:从“地图单元”到“场景”
在左侧的树结构列表中可以发现,原本的“地图单元列表”改为了“场景”。原本的地图单元下面会包含一张拓扑地图和N张运行(SLAM)地图;而在新版的列表中,一个场景下面,除了有一张拓扑地图和N张SLAM地图之外,还增加了AMR和其他设备的二级导航。这两者的差别是:1)地图单元:以单张拓扑地图的维度,对它所关联的多张SLAM地图进行“文件夹”式的管理;
2)场景:在不改变管理维度的前提下(依旧是以单张拓扑地图为一个“场景”),进一步增加了这张拓扑地图所关联的AMR以及呼叫器、控制器等其他设备的管理,目的是为了能更方便地管理和展现拓扑地图所关联的项目数据资源,而不用像之前那样要从多个软件端收集和管理数据。
因此,当分别点击“场景”以及下属的“AMR”、“其他设备”时,右侧的界面内容会发生相应的更改:
1)“场景”(用户也可自定义其名称)除了主要展示拓扑地图以及下属的运行地图之外,还在右上方展示这张地图关联的AMR和其他设备总数。点击相应的位置就能进行编辑、添加地图或设备等操作。
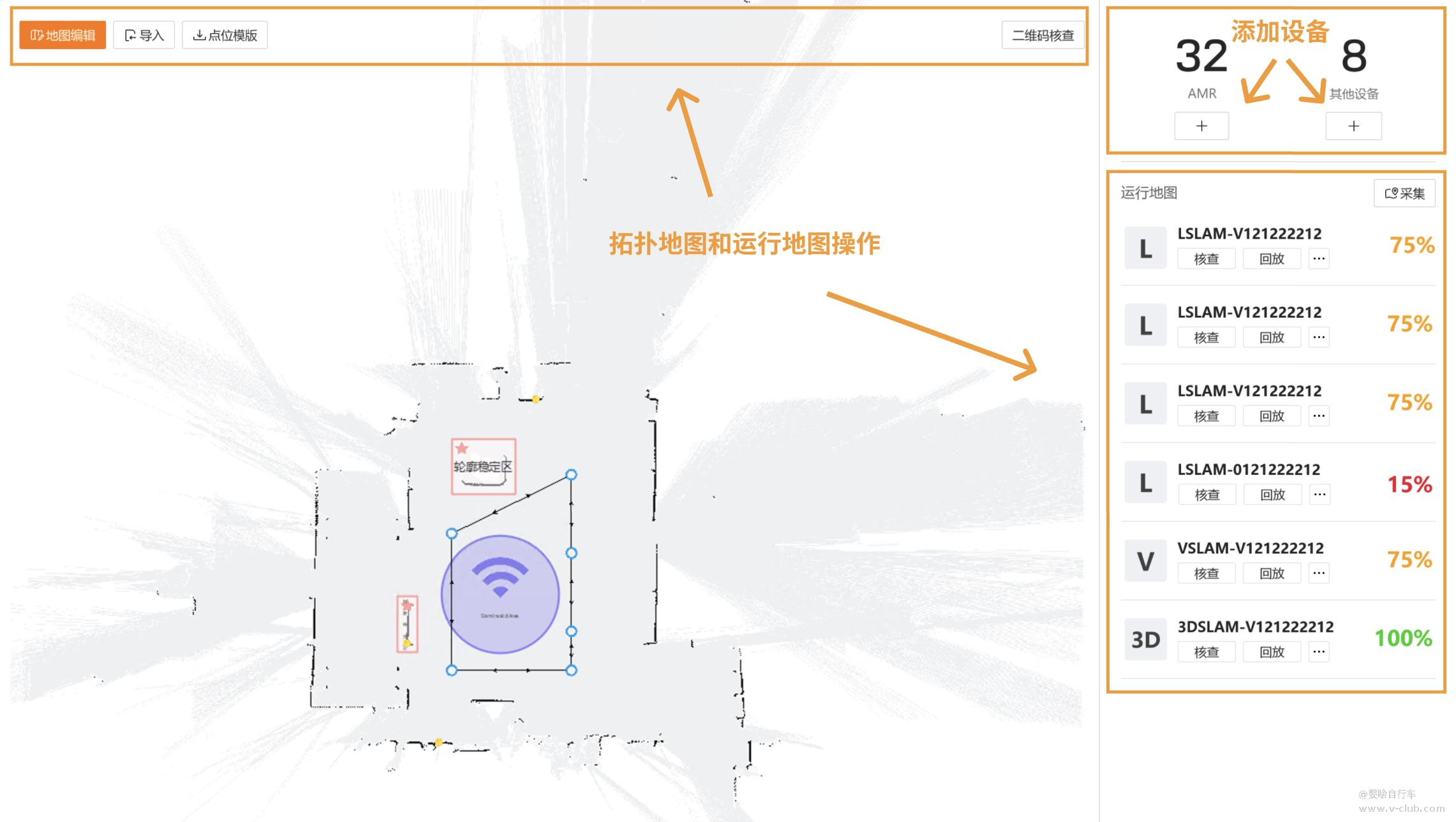
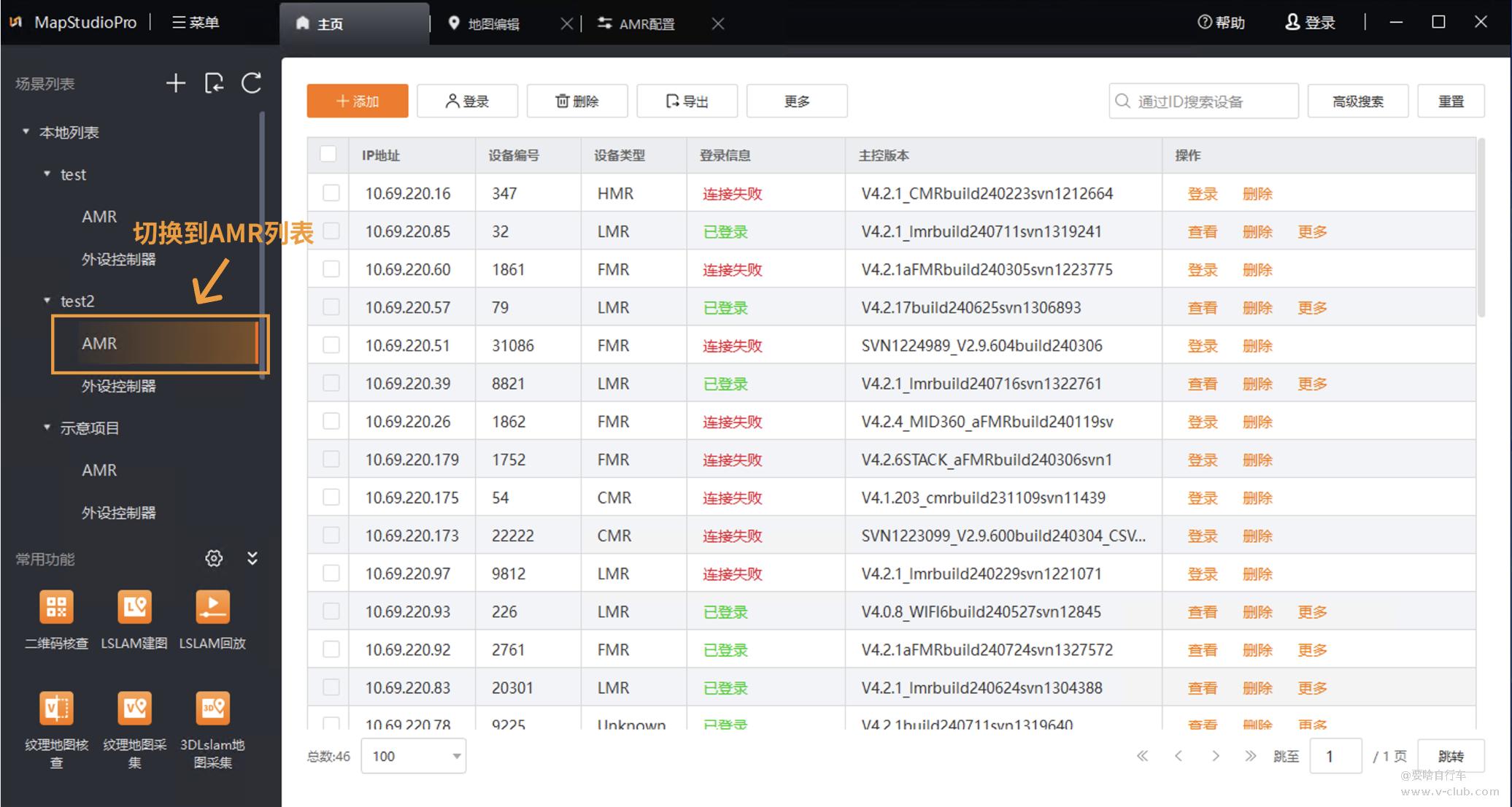
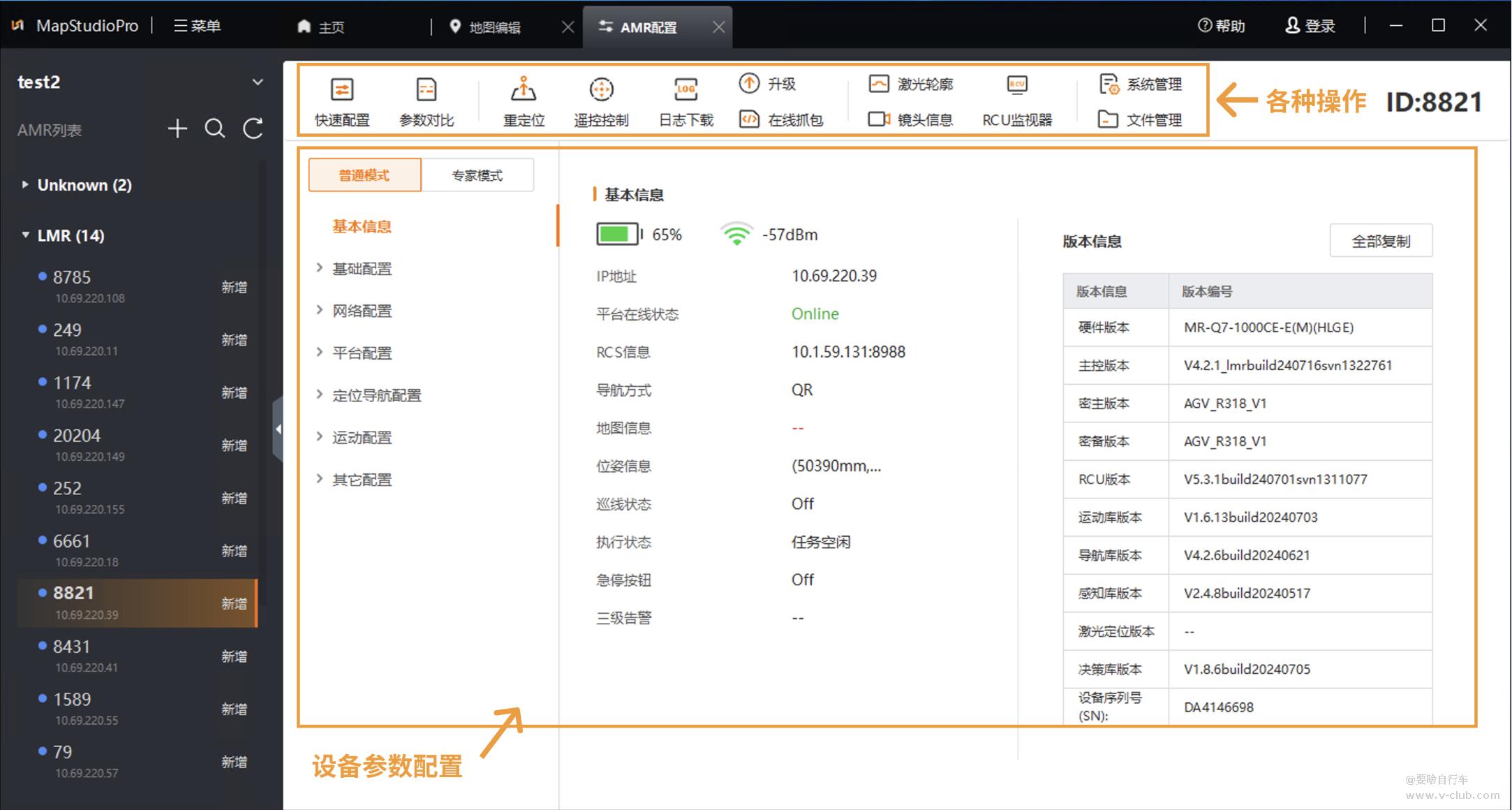
2)“AMR”就是对这张地图下所有的AMR设备以列表的形式进行展示和管理,从列表能进一步进入单个AMR设备的配置页,在AMR配置页里就能对单台设备进行日志分析、查看激光轮廓、重定位等操作。
3)“其他设备”和“AMR”列表相似,就不重复说明啦。
二、增加功能TAB页:多个功能自由切换
而在新版的客户端中,这些大大小小的程序都转化为了一个个顶部TAB(标签)页,这样在一个客户端里就能自由切换功能,也省去了反复登录设备的麻烦。

由于多TAB页涉及数据的共用,所以软件增加了一套保护机制来防止数据冲突导致的操作风险。例如:
1、当同一张地图被地图编辑、核查、回放等多个功能打开时,若有任何改变了地图数据的操作,则需要刷新其他相关页面的地图完成数据同步;
2、当同一台小车时被添加、删除、登录或登出,也会在相关页面(包括AMR列表、参数配置或其他需要连接AMR使用的页面)中出现同步设备状态。
三、整合独立工具
以上就是对MapStudioPro的V1.0版本中,软件功能框架调整的一个简单总结啦。不知道大家觉得这次改版效果怎么样呢?欢迎各位留言讨论~
ღ( ´・ᴗ・` )比心


MapstudioPro中二维码打印-批量打印-下载文档模板,选择保存.cxv表格是无法保存的,没有该文件。使用之前HIK-code的模板导入又不支持兼容。
- 1

 话术-用AI协助编写VM3D脚本模块的代码2026-06-29
话术-用AI协助编写VM3D脚本模块的代码2026-06-29 基于基础应用扩展的偏心抓取算法2026-07-07
基于基础应用扩展的偏心抓取算法2026-07-07 更换主控具体需要准备哪些工具和文件?2026-07-23
更换主控具体需要准备哪些工具和文件?2026-07-23- 移动机器人技术分享-26年7月2026-07-17
 浙公网安备 33010802013223号
浙公网安备 33010802013223号