如何从SDK获取多台轮廓仪拼接后的图像
- 0
- 0
- 分享
- 2025-03-27 18:42
因部分客户不适用VM进行图像处理,所以使用3DMVS客户端可进行拼接图像,但客户需获取拼接后的图像进行处理,客户端存储后再读取文件夹效率较低,故本篇文章介绍从SDK如何获取多台轮廓仪拼接后的图像
1. 确保在3dmvs客户端已经完成过拼接(已经上传过标定文件,并改为系统坐标系)
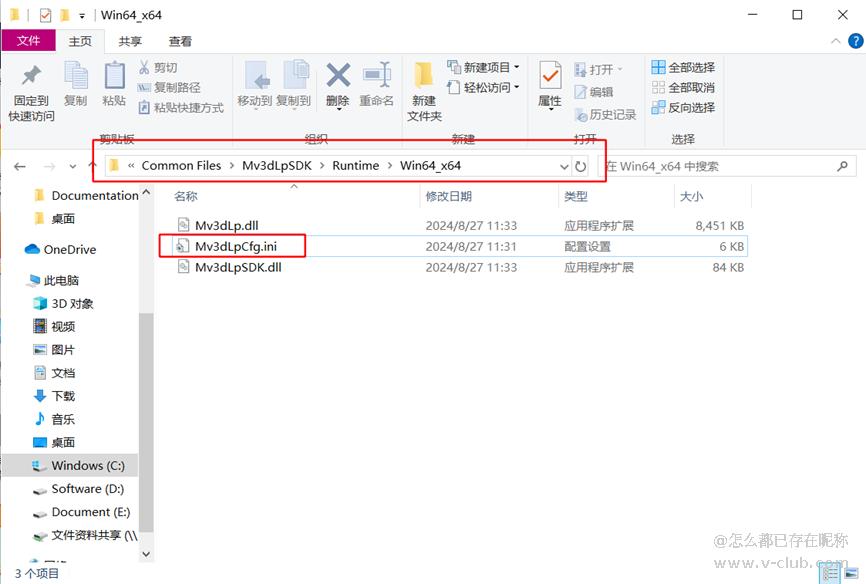
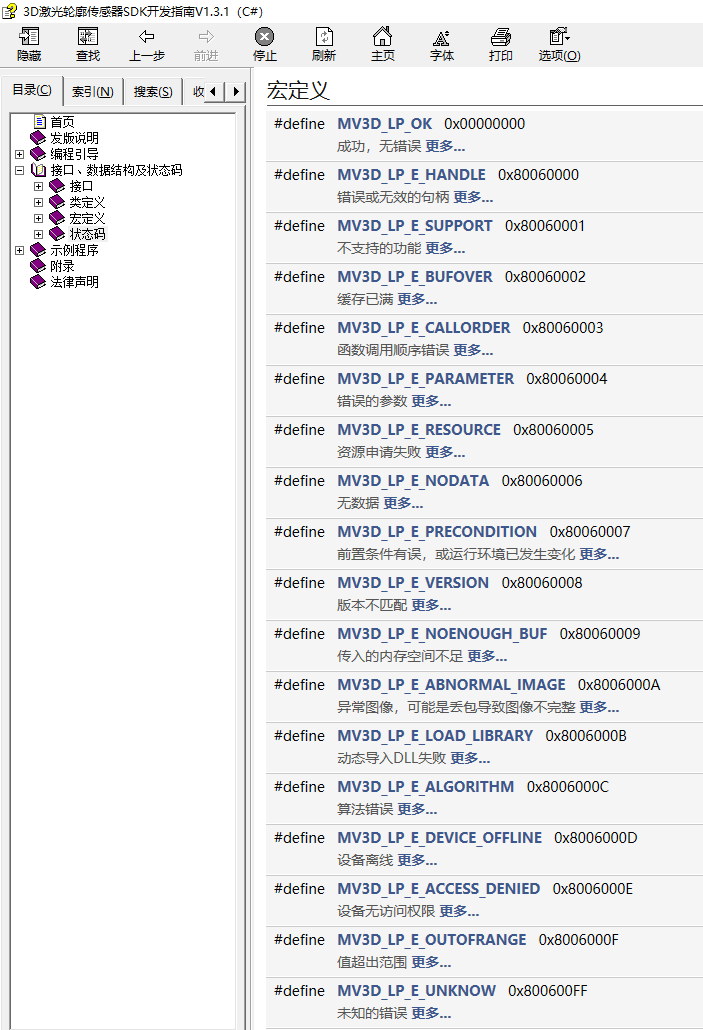
2. 找到C:\Program Files (x86)\Common Files\Mv3dLpSDK\Runtime\Win64_x64文件夹下面的配置文件
3. 修改配置文件中的拼接参数,下面截图中以对射参数为例
对射:SingleCamera=0 MergeType=4
对头: SingleCamera=0 MergeType=3
并列:SingleCamera=0 MergeType=3
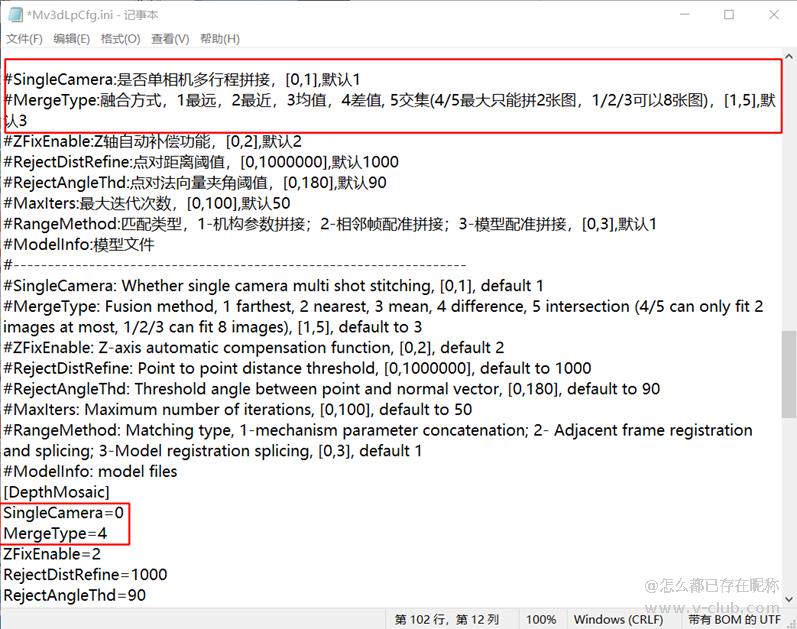
修改完成后保存配置文件的修改
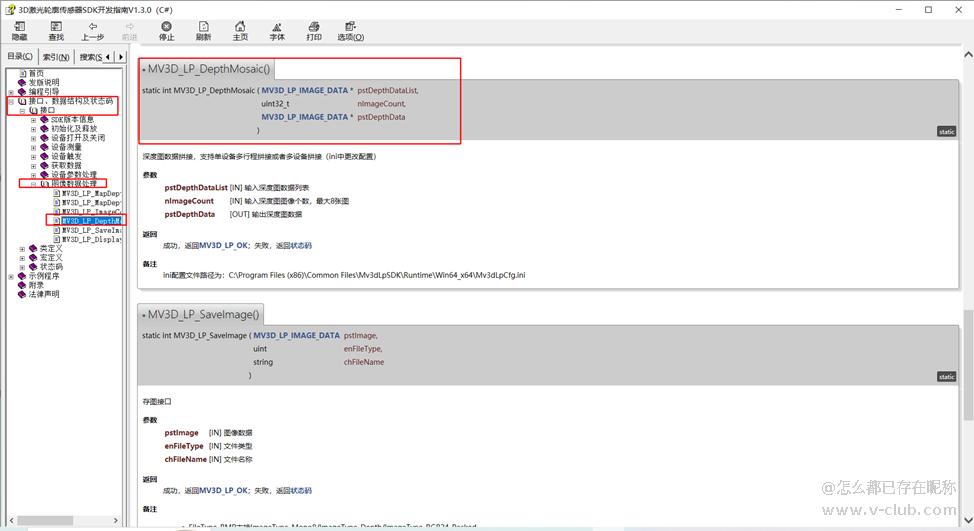
4. 接下来代码中就可以通过MV3D_LP_DepthMosaic()接口获取拼接后的图像,此接口的作用仅为将两张深度图按照配置文件中的拼接方式拼接为一张深度图,前期的标定以及标定文件的上传均需客户端完成,也就是需严格完成步骤1后才可以获取到拼接后的深度图
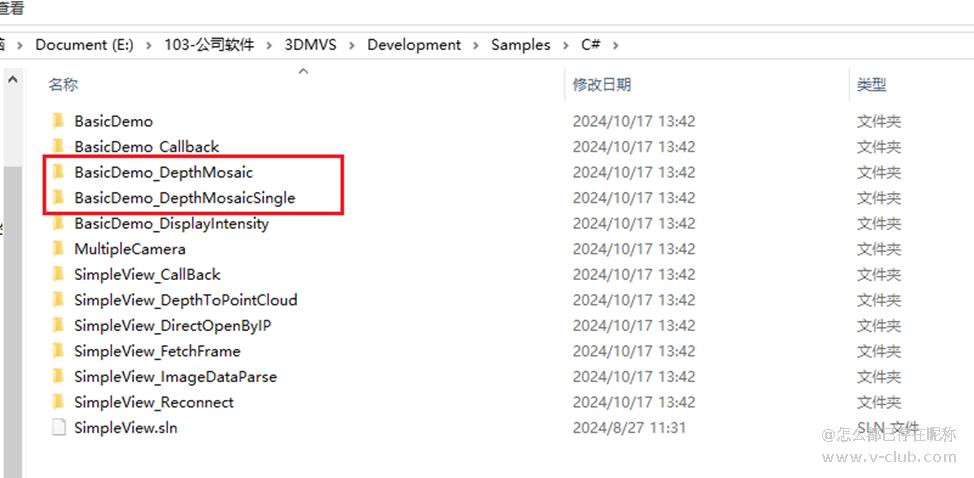
5. 文档中接口使用的示例demo参考位置为,第一个为多相机拼接示例,第二个为单相机多行程拼接示例
附件:
版权声明:本文为V社区用户原创内容,转载时必须标注文章的来源(V社区),文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件至:v-club@hikrobotics.com 进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容。
下一篇
评论请先登录 登录
全部评论 0


相关阅读
 【形状匹配算法系列】从NCC到轮廓匹配:工业视觉的"定位之争",到底争的是什么?2026-05-19
【形状匹配算法系列】从NCC到轮廓匹配:工业视觉的"定位之争",到底争的是什么?2026-05-19 项目实施过程中关于对标的思路及经验分享2026-05-09
项目实施过程中关于对标的思路及经验分享2026-05-09- 移动机器人常识2026-05-15
 通过socket将图片传输到vm外部2026-05-09
通过socket将图片传输到vm外部2026-05-09- 移动机器人技术分享-26年5月2026-05-15
 浙公网安备 33010802013223号
浙公网安备 33010802013223号