- 0
- 2
- 分享
- 2026-04-17 10:48
一 项目背景:
汽车顶棚在人工装配工序后需要进一步成品件防错检测,为解决错漏装导致的品质问题,通过扫码及视觉检测的方案来防止问题件流出工厂。
二 工艺流程:
扫描总成零件号→(扫描线束码→扫描左后顶灯码→扫描天线后馈码→扫描右后顶灯码)→检测顶棚B面错漏装→检测顶棚A面错漏装→完成自动复位
三 流程分析:
每一个执行动作都有OK\NG两种结果:结果需要显示在UI界面上;结果决定流程步骤(OK跳转下一动作,NG继续当前动作);顺序执行每一动作都OK后检测流程才能正常结束。
这里存在复杂的if-else的逻辑判断,如果单纯用分支模块,就会使得程序非常庞大,也不好维护。那么接下去就以状态机的模式彻底解决这个问题。
四 方案搭建:

>>方案分5个流程,每个流程处理单独的业务逻辑
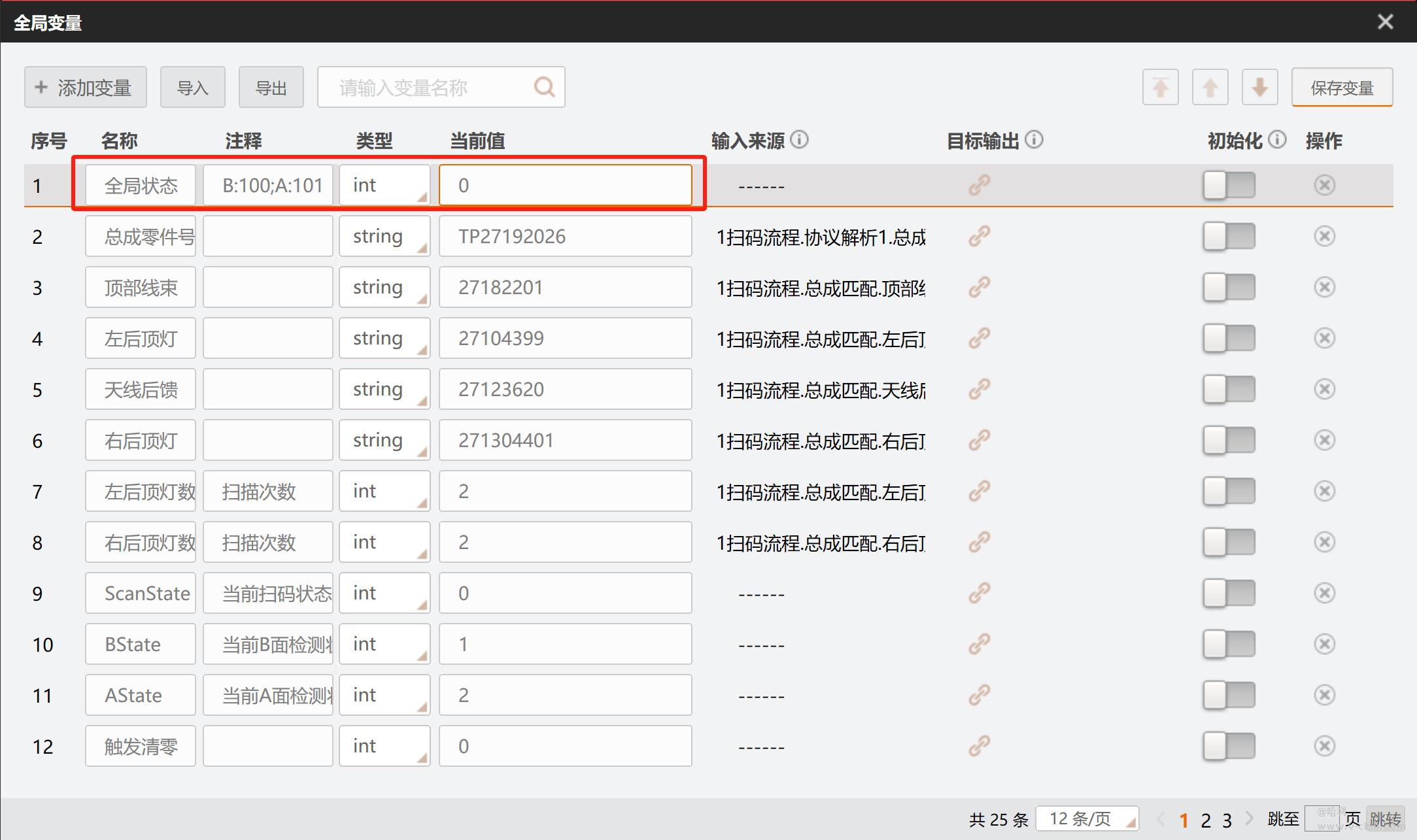
>>定义全局状态变量,作为状态切换的核心判断标志。(定义0,1,2,3,4,100,101来分别对应执行步骤)
1 扫码流程实现:
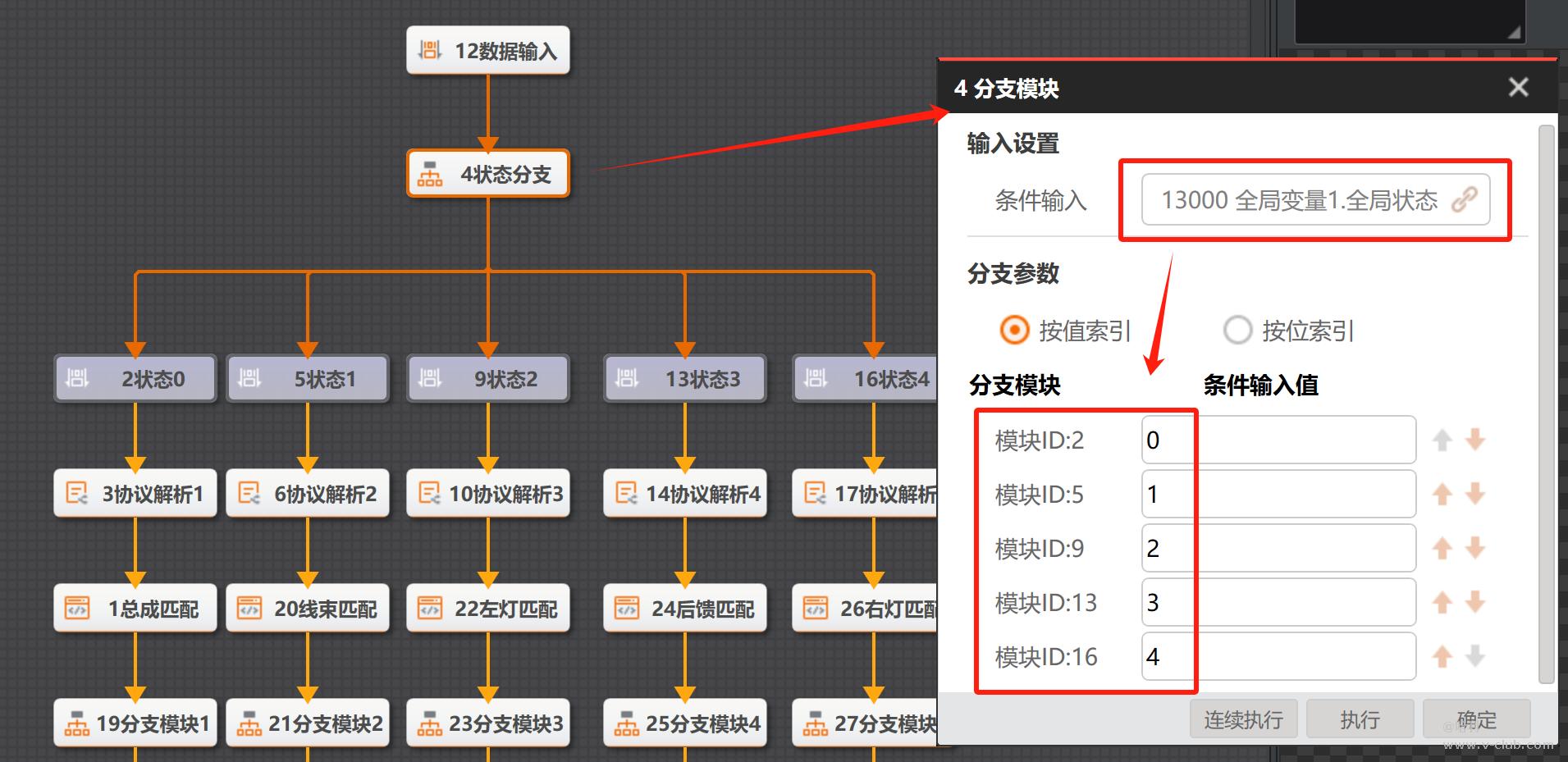
使用分支模块,根据全局状态变量的值执行对应分支来实现状态管理。

再次通过分支模块来决定是否切换状态,而每次的分支流程都会刷新UI界面将判断结果和状态结果都体现在界面上。
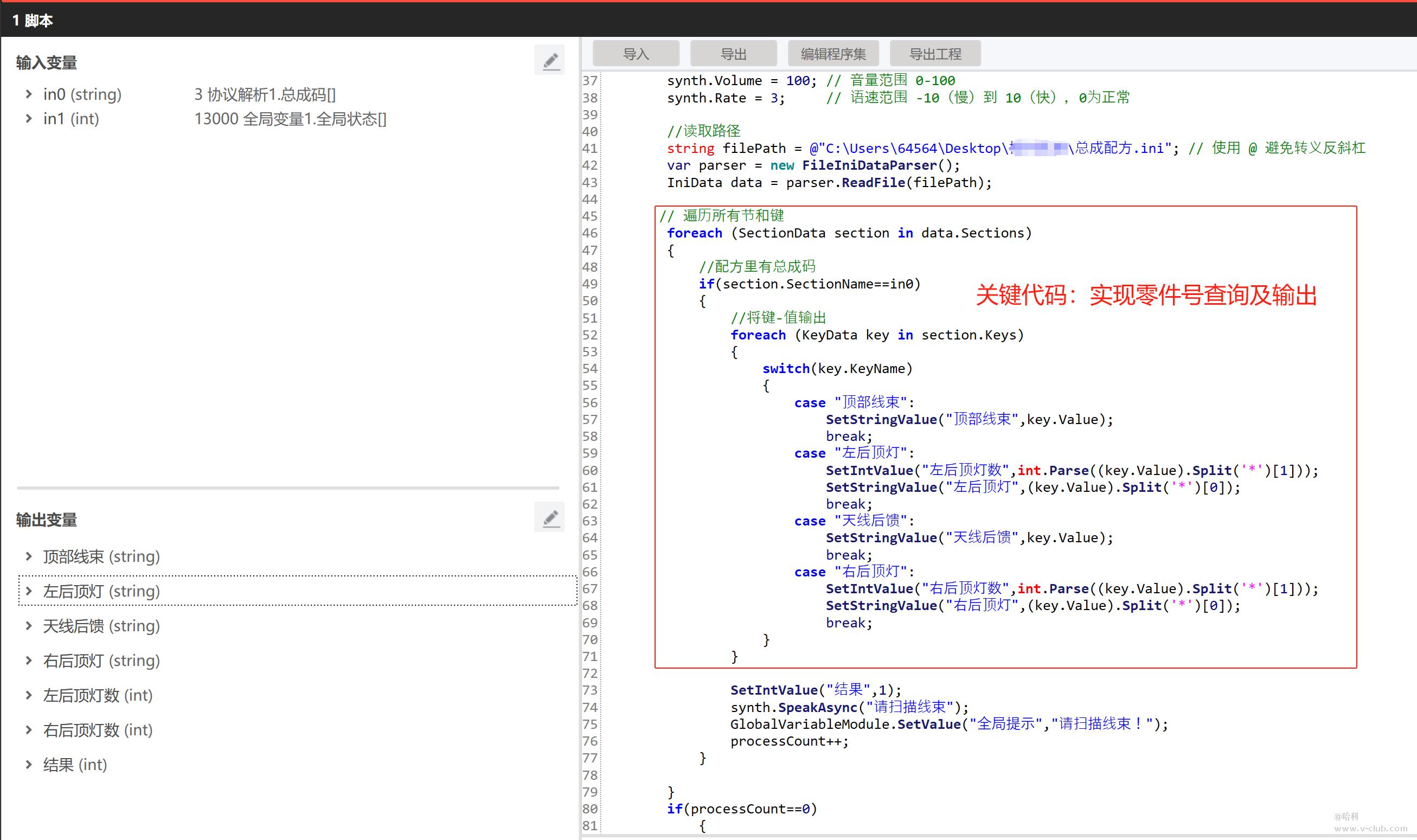

本方案通过读取ini文件来实现配方管理,简单明了,当扫描总成零件号(例如 TP27192026)成功匹配之后,脚本输出线束、阅读灯等对应码信息到全局变量,状态1-4即判断对应码信息是否匹配即可防错。
2 B面检测流程实现:

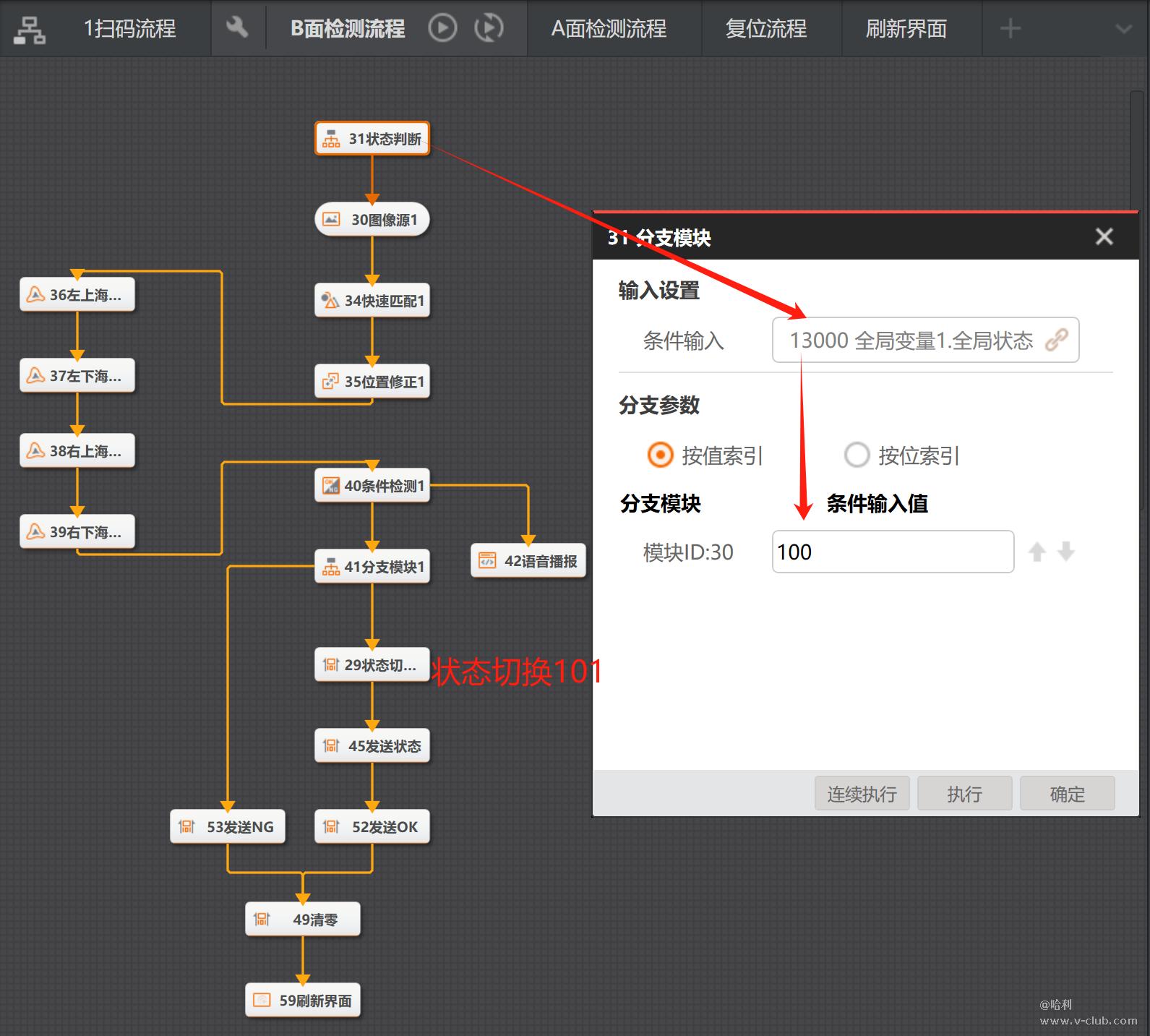
当扫码完成后,需要人工按下按钮触发视觉检测,同样以状态来判断是否执行流程,如果流程检测OK,那么切换状态为101,以及刷新界面。
3 A面检测流程:
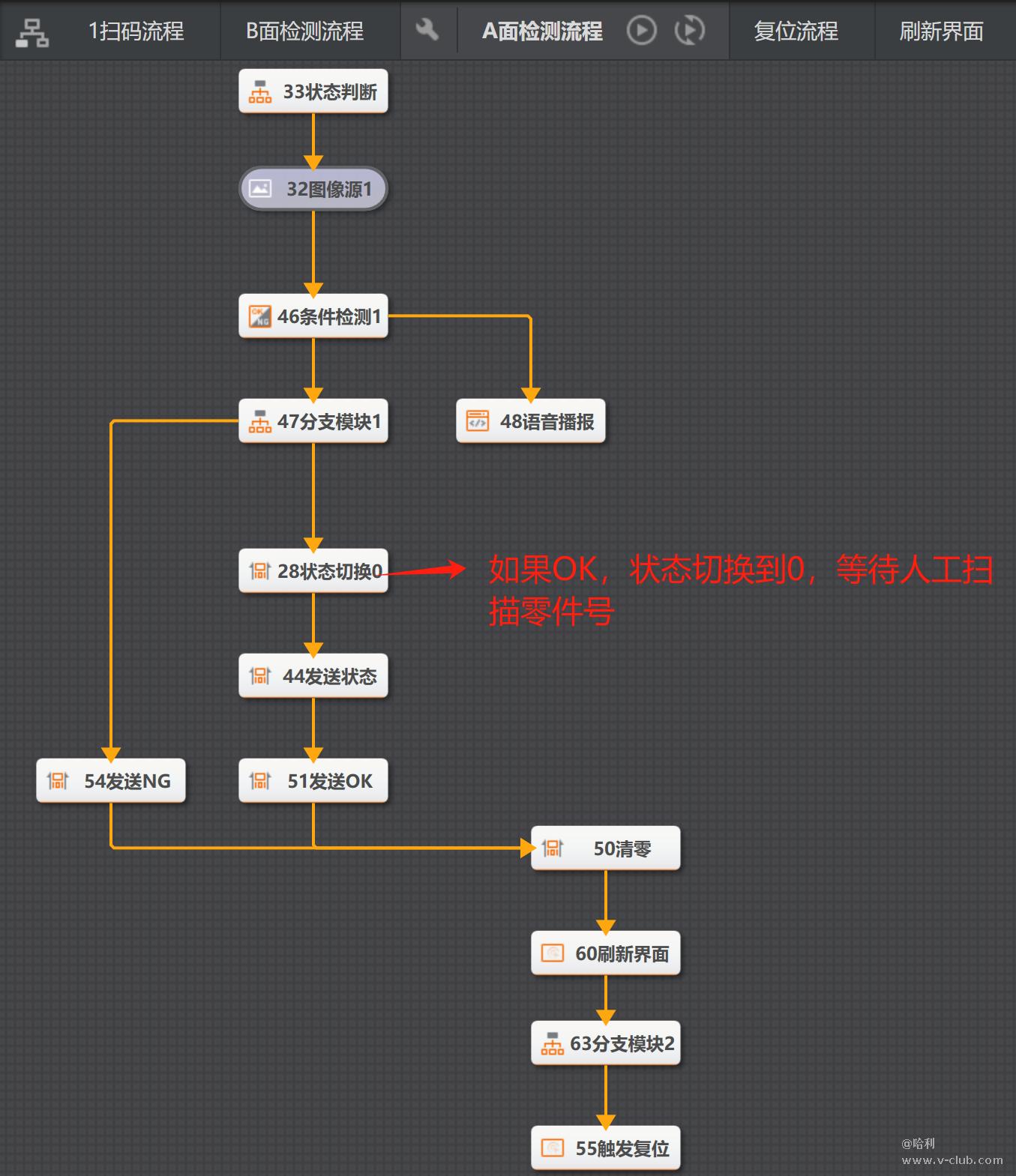
当B面合格后,员工手工翻转顶棚,再次按下按钮,启动A面视觉检测,检测OK切换到状态0,刷新界面以及复位。
复位及刷新界面流程通过流程调用,实现数据及UI的实时响应


以上全流程完成了状态机整体框架,具体视觉检测部分未细化,可扩展部分如实现日志记录,方便后续的数据追溯等可通过脚本自由实现。
五 核心收获:
1、状态管理让复杂业务变简单,结构清晰,逻辑严谨
2、UI与状态机完美同步,人机交互更友好
3、VisionMaster软件的应用拓展,拓宽了视觉应用工程师的实战思路
六 视频和案例分享:
见附件
最后,如果你觉得这篇文章对你有帮助,不妨点个赞支持一下!



- 1

 话术-用AI协助编写VM3D脚本模块的代码2026-06-29
话术-用AI协助编写VM3D脚本模块的代码2026-06-29 基于基础应用扩展的偏心抓取算法2026-07-07
基于基础应用扩展的偏心抓取算法2026-07-07 更换主控具体需要准备哪些工具和文件?2026-07-23
更换主控具体需要准备哪些工具和文件?2026-07-23- 移动机器人技术分享-26年7月2026-07-17
 浙公网安备 33010802013223号
浙公网安备 33010802013223号