- 0
- 0
- 分享
- 2022-09-23 19:42
运动学定义
运动学,从字面上理解就是研究运动特征的一门学科,具体来讲,运动学通过几何学研究物体在某一坐标系下位姿随时间变化的规律,且不考虑力和物体自身物理性质。本文后续的内容将围绕移动机器人对运动学基础知识展开讲解。
运动学模型
在上一节的定义中提到,运动学的研究不考虑力和物体自身的物理性质,所以运动学的模型也对物体的部分性质做了理想化和抽象化的处理,基本分类可参考下图:
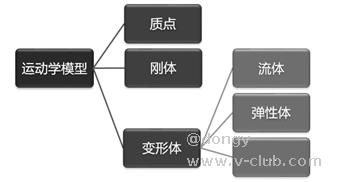
质点:没有形状和质量、但在空间占据一定位置的几何点,内部不存在相对运动。可研究运动方程、轨迹、位移、速度、加速度等运动特征。
刚体:没有质量,但是具有一定形状,占据一定空间且不产生形变的形体。内部可视为由大量质点组成,质点间不存在相对运动。挑选内部一点代表整个刚体, 除质点本身具备的运动特征外,还可以研究刚体的转动过程、角速度、角加速度等更复杂的运动特征。
变形体:会在外力下产生形变的形体的统称。在实际应用中,一般在工程上确保移动机器人的形变可被忽略,所以本文不展开讨论变形体的特征。
1.3 运动特性
根据上一小节的介绍,不难发现移动机器人通常可视为刚体,因为其本身的形状和转动不可被忽略。刚体的运动特性又可分为如下几类:
(1)平动:刚体内两点所连成的直线在移动过程中保持平行,即不存在任何姿态变化,可视为质点;
(2)定轴转动:刚体绕内部一条固定直线转动;
(3)定点转动:刚体绕固定一点转动;
(4)平面运动:刚体内部任意一点与某一固定平面距离保持不变的运动;
(5)一般运动:刚体在空间内自由运动,不存在任何约束。
1.4 基本原理
用刚体描述移动机器人意味着在研究过程中可以利用刚体的性质,在对运动特征进行研究前需要了解一些相关的基本原理和方法。
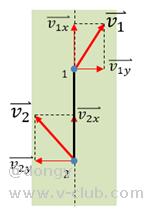
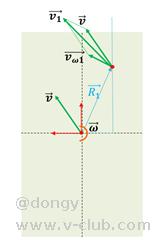
(1)速度投影定理
刚体上任意两点的速度不一定相同,但两点的速度在沿着其连线方向上的投影必定相同。如下图,假设现在两点分别具有线速度,两者在连线上的分量必定相等:
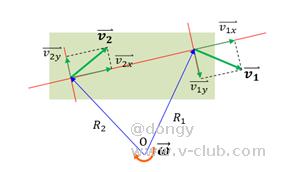
(2)速度瞬心法
刚体在做平面运动且具有一定角速度时,都可以从该平面中找到一点作为瞬心(ICR);瞬心的速度为0,这一时刻刚体上的所有点都可视为绕瞬心进行旋转运动,各点角速度相同。当刚体角速度为0时瞬心视为在无穷远处。
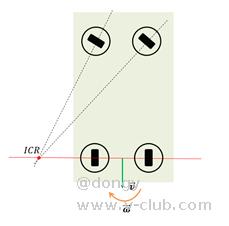
(3)阿克曼转向原理
为了保证移动机器人在运动过程中每组舵轮都处于纯滚动状态,在转向时各组舵轮轴线都必须交于同一点(瞬心),下图为一般汽车阿克曼结构底盘(前轮转向,后轮定向)受到的约束。
(4)基点法
刚体做平面运动时,任一时刻刚体的运动可分解为刚体上任意一点(基点)的“旋转运动“+”平移运动”。如下图所示:



 移动机器人工程师培训与认证安排-26年7月2026-06-16
移动机器人工程师培训与认证安排-26年7月2026-06-16- 拒绝踩坑!海康读码器串口通讯全链路实战:从硬件接线到触发指令配置2026-06-16
 基于基础应用扩展的偏心抓取算法2026-07-07
基于基础应用扩展的偏心抓取算法2026-07-07 话术-用AI协助编写VM3D脚本模块的代码2026-06-29
话术-用AI协助编写VM3D脚本模块的代码2026-06-29- 【图像增强】对比度halcon实现2026-06-22
 浙公网安备 33010802013223号
浙公网安备 33010802013223号