- 0
- 0
- 分享
- 2025-03-27 12:02
轮廓仪相机排查
1、环境配置
①软件:3DMVS软件(详细见附录1)、VM3d(详细见附录2)
②物料准备:相机、对应型号标定块(详细见附录4)、线缆(详细见附录3)、移动平台(品牌->匠信),3d加密狗(详细见附件5)。
③相机环境:撕掉相机镜头两个贴纸。
2、轮廓仪硬件排查
2.1 【外观异常排查】
新相机首先进行外观检查,查看网口是否存在松动,镜片是否存在脏污、划痕、破损,相机摇晃是否有异响。若有以上现象则硬件存在问题。
2.2 【原始图异常排查】
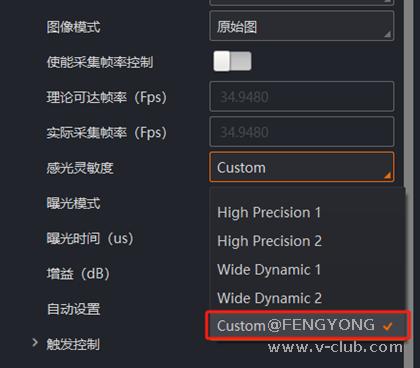
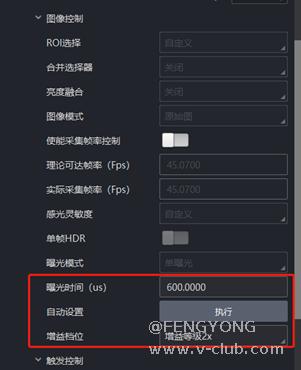
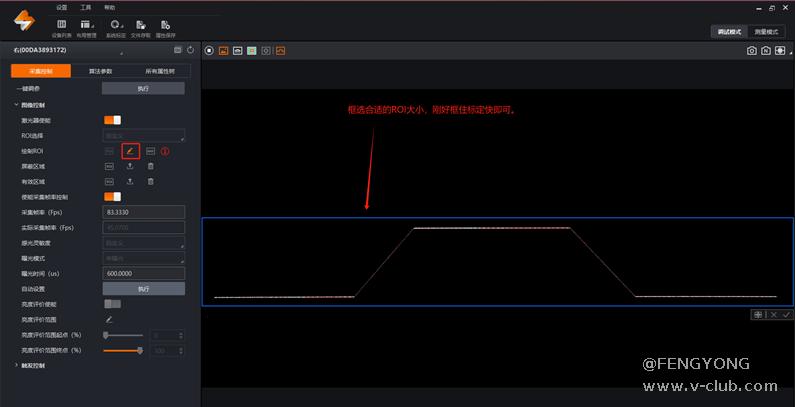
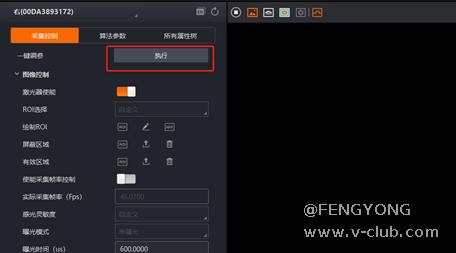
①打开3DMVS,连接相机,把标定块移动到中心视野,图像控制→感光灵敏度为custom,调整曝光到600(若过曝或过暗可自行加减曝光至亮度均匀,如下图)
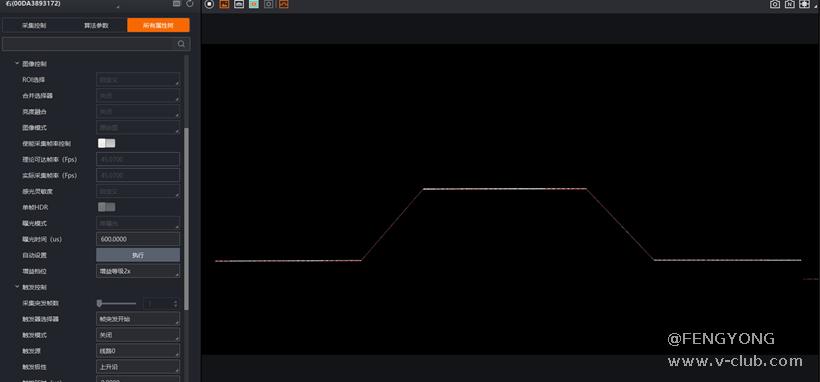
原始图成像
②查看原始图若在竖线、底噪、激光局部不均等问题,则相机存在问题
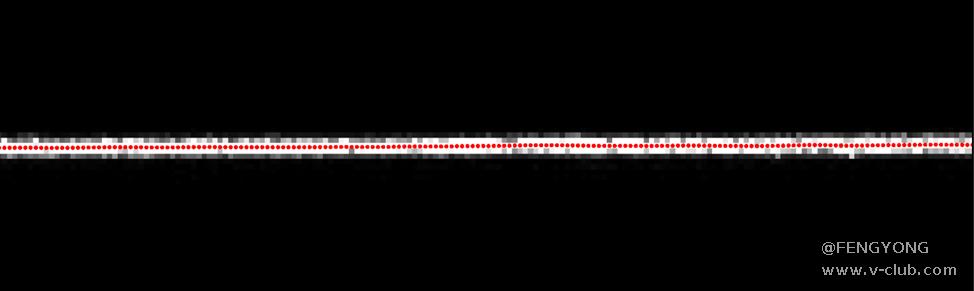
正常激光线形态

原始图花屏

原始图错位
3、轮廓仪功能性测试
3.1 【IO功能测试】
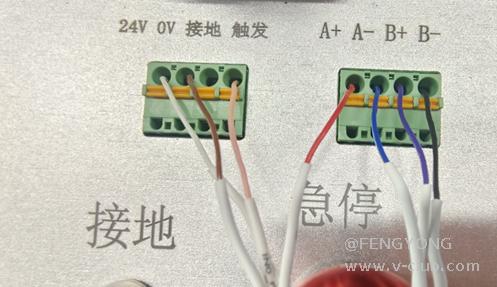
①将IO线接到平移台上,具体接线如下图所示:
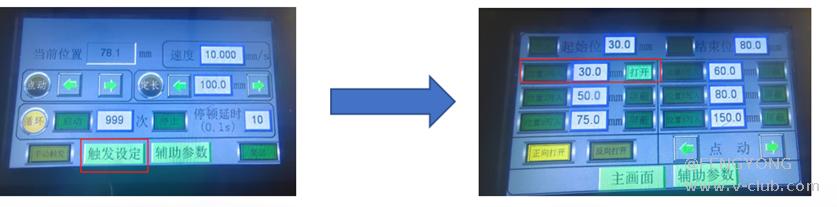
②平移台参数按照如下配置(仅配置红框参数即可)。


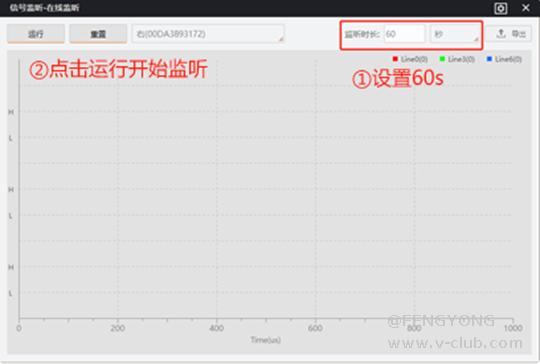
③在3DMVS中,打开工具→信号检测工具,点击在线监听,设置监听时长为60s

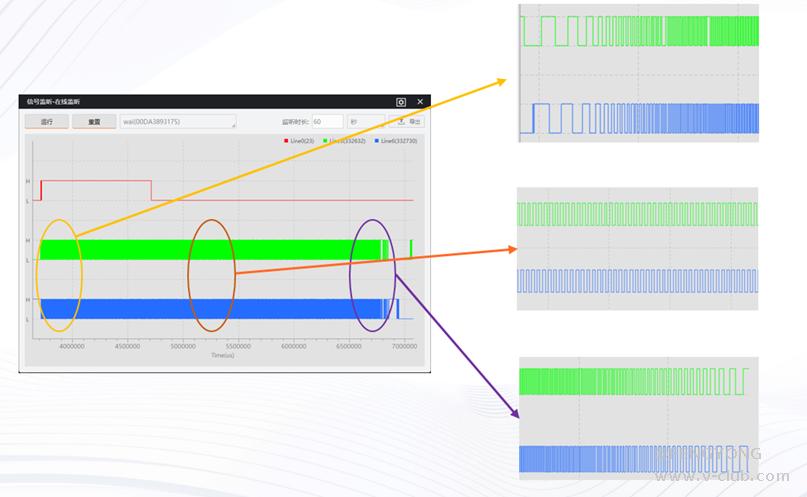
④观察监听工具信号,若红色线是单个且稳定的方波信号,绿色和蓝色是稳定的,由稀疏变密集再由密集变稀疏的方波信号,则IO功能正常
4、轮廓仪精度测试
4.1 【重复精度测试】。
①3DMVS中配置ROI,采集控制->图像控制->绘制ROI->点击“小笔图案”,ROI只框住标定快顶面和底面即可。
②采集控制->一键调参->点击“执行”, 按照如下图配置参数,其中XY但像素精度按照推荐输入,然后点击“一键调试”。


一键调试工具参数配置 X、Y单相素精度推荐数值
③3DMVS中,点击设置->抓图,按照如下设置存图,点击“确定”。

④点击“开始采集”,待图像输出后点击“N”按钮存图,存储32张

⑤压缩包中打开命名为“相机测试”的方案,双击“平面检测”模块, 更改ROI位置到标定块底面上;双击“统计测量”模块,调整统计测量18模块ROI位置在标定块顶面上,19模块ROi位置在标定块底面上。
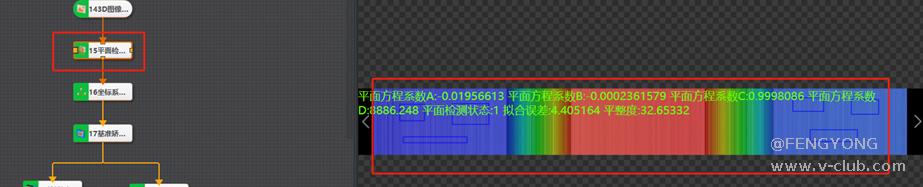
平面检测模块

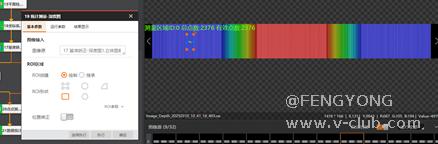
统计测量模块
⑥找到对应相机的最大误差值。

⑦打开“自动切换”的按钮,再点击蓝色框中的按钮,等待10s单击“数据统计”模块,找到模块结果—>统计极差。

该例统计极差为1.88um,1.88um<3120-P的最大误差=8um,说明该相机性能合格。
附录:
1、3DMVS下载网址:https://www.hikrobotics.com/cn/machinevision/service/download/?module=0

2、vm3d下载网址:https://www.hikrobotics.com/cn/machinevision/service/download/?module=0

3、线缆:
电源线申领下方红框中任意都可以:

网线申领下方红框中任意都可以:

4、对应型号的标定块:

5、加密狗申请下方红框中任意一个即可:





 基于基础应用扩展的偏心抓取算法2026-07-07
基于基础应用扩展的偏心抓取算法2026-07-07 话术-用AI协助编写VM3D脚本模块的代码2026-06-29
话术-用AI协助编写VM3D脚本模块的代码2026-06-29 博图半导体SOP封装视觉检测方案2026-06-25
博图半导体SOP封装视觉检测方案2026-06-25
 浙公网安备 33010802013223号
浙公网安备 33010802013223号